

Understanding Stepper Motor Basics
Introduction
A stepper motor is an electromagnetic device that converts electrical pulse signals into angular or linear displacement. This type of motor is very common in the field of automated control because of its precise control and the advantage of not requiring a feedback system. This article will introduce the basic concepts, working principles, types, and applications of stepper motors to beginners.
What is a Stepper Motor?
A stepper motor is a type of digital control motor that controls the motor’s rotation through digital signals. Each electrical pulse causes the motor to rotate a fixed angle, known as the step angle. This characteristic of stepper motors makes them very useful in situations that require precise positional control.
Working Principle of Stepper Motors
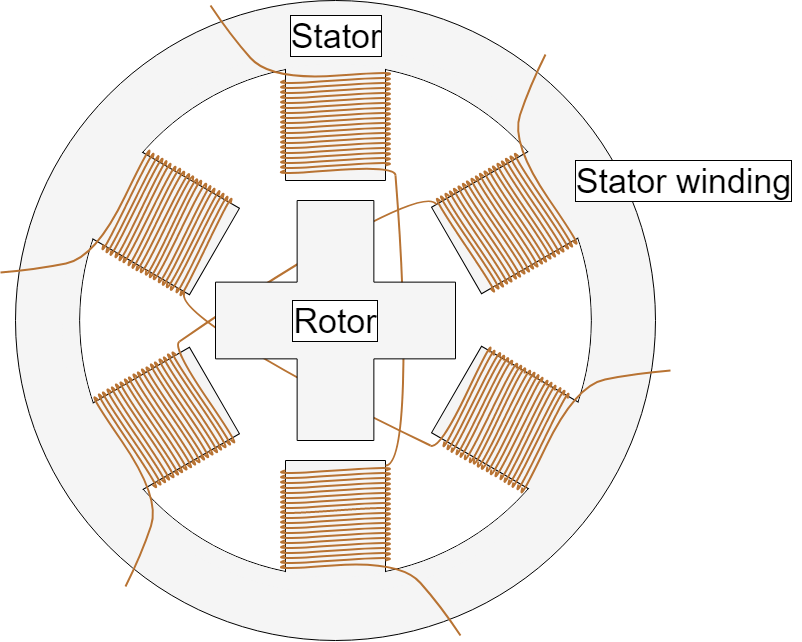
Like all motors, stepper motors also include a fixed part (stator) and a moving part (rotor). The stator has a gear-like protrusion with winding coils, while the rotor is a permanent magnet or a variable reluctance core. We will look at the different rotor structures in more depth later. Figure 1 shows a cross-section of the motor with a variable reluctance core rotor.
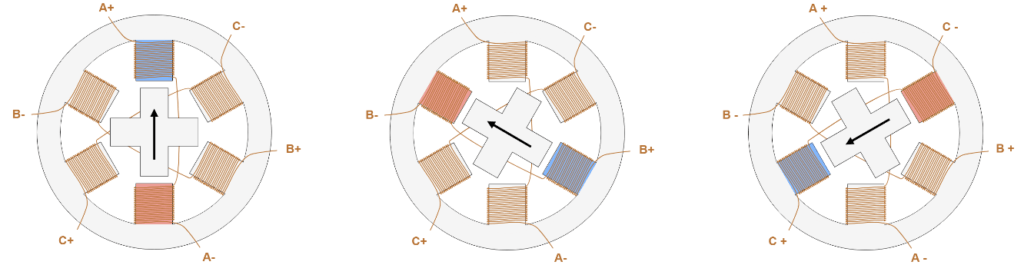
The basic working principle of the stepper motor is: the phase of one or more stators is energized, the current passing through the coil will generate a magnetic field, and the rotor will be aligned with the magnetic field; Applying voltage to different phases in turn, the rotor will rotate at a specific Angle and eventually reach the desired position.
Figure 2 shows how this works. First, coil A is energized and generates a magnetic field, with which the rotor is aligned; After coil B is energized, the rotor is rotated 60° clockwise to align with the new magnetic field; The same thing happens when coil C is powered on. The color of the stator teeth in the figure below indicates the direction of the magnetic field generated by the stator windings.
Type and construction of stepper motor
The performance of the stepper motor (whether it is resolution/step, speed or torque) is affected by the details of the construction, and at the same time, these details may also affect how the motor is controlled. In fact, not all stepper motors have the same internal structure (or construction), because different motors have different rotor and stator configurations.
Rotor
Stepper motors basically have three types of rotors:
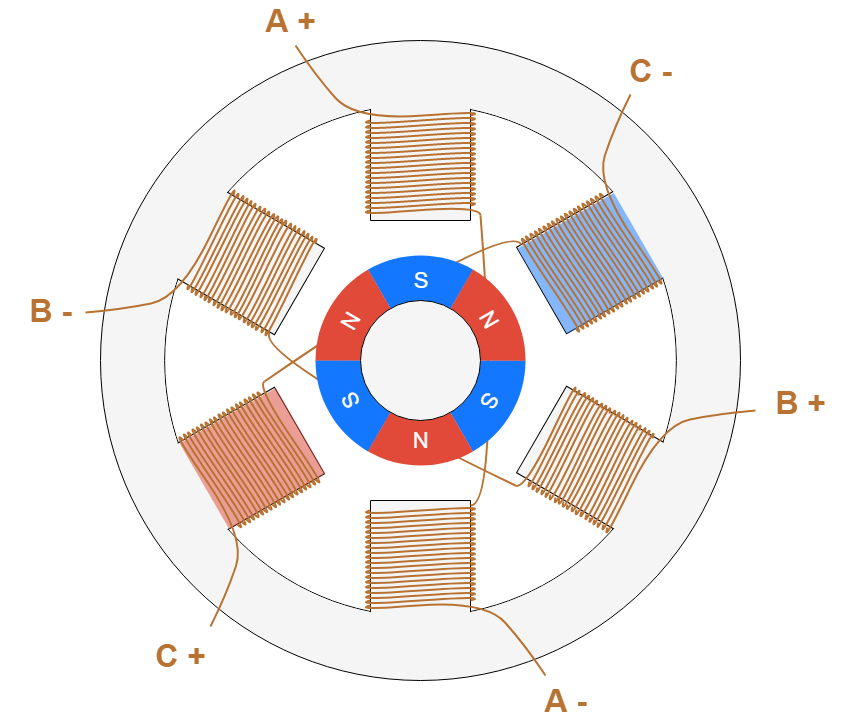
- Permanent magnet rotor: The rotor is a permanent magnet, aligned with the magnetic field generated by the stator circuit. This rotor guarantees good torque and has braking torque. This means that regardless of whether the coil is energized or not, the motor can resist (even if not very strongly) changes in position. However, compared with other rotor types, its disadvantage is that both speed and resolution are lower. Figure 3 shows a cross-section of a permanent magnet stepper motor.
- Variable reluctance rotor: The rotor is made of an iron core and has a special shape that can be aligned with the magnetic field (see Figures 1 and 2). This rotor is easier to achieve high speeds and high resolution, but the torque it produces is generally lower and there is no braking torque.
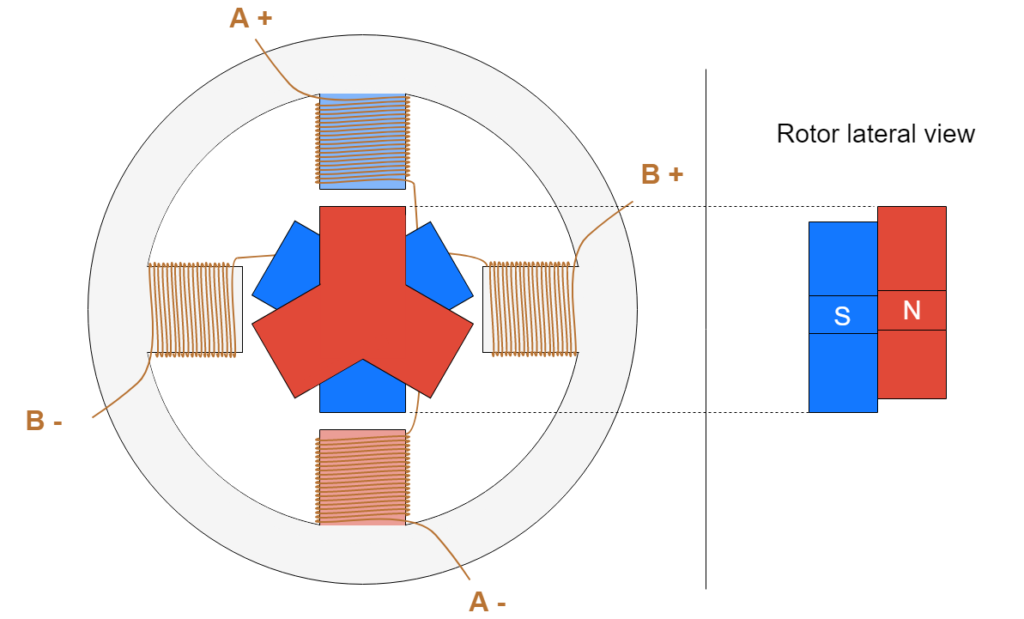
- Hybrid rotor: This rotor has a special structure, it is a hybrid of permanent magnet and variable reluctance rotor. There are two axially magnetized magnetic caps on the rotor, and there are alternating small teeth on the magnetic caps. This configuration gives the motor the advantages of both permanent magnet and variable reluctance rotor, especially with high resolution, high speed and high torque. Of course, higher performance requirements mean more complex structures and higher costs. Figure 3 shows a simplified schematic diagram of this motor structure. When coil A is energized, a small tooth of the rotor N magnetic cap is aligned with the stator tooth of magnetized S. At the same time, due to the structure of the rotor, the rotor S magnetic cap is aligned with the stator teeth of magnetization N. Although the working principle of the stepper motor is the same, the structure of the actual motor is more complex, and the number of teeth is more than that shown in the figure. A large number of teeth allows the motor to obtain a very small stepping Angle, as small as 0.9°.
Stator
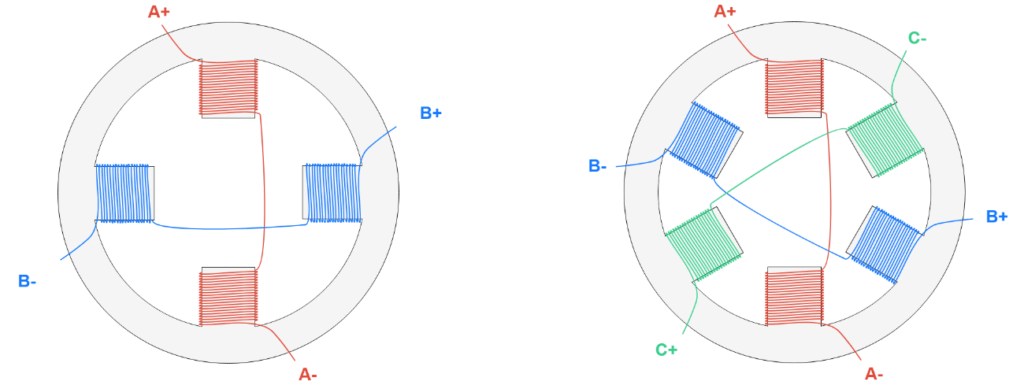
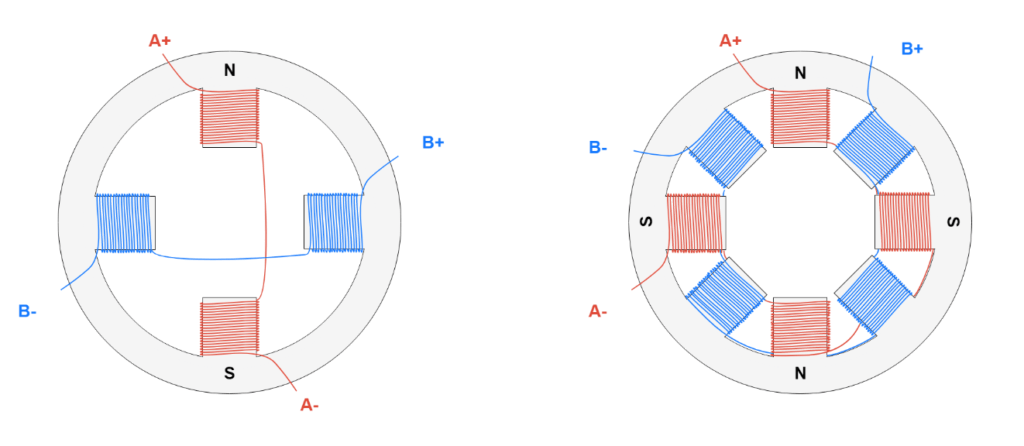
The stator is the part of the motor responsible for generating the magnetic field with which the rotor is aligned. The main characteristics of the stator circuit are related to its phase number, pole number and wire configuration. The number of phases is the number of independent coils, and the number of poles represents the main pair of teeth occupied by each phase. Two-phase stepper motors are most commonly used, while three-phase and five-phase motors are less commonly used (see Figures 5 and 6).
Features of Stepper Motors
- Precise Control: Stepper motors can precisely control angles and speeds.
- No Need for Feedback: Due to their working principle, stepper motors usually do not require a position feedback system.
- Easy to Control: Stepper motors can be controlled through simple pulse signals.
- High Torque at Low Speeds: At low speeds, stepper motors can provide a large torque.
Applications of Stepper Motors
Stepper motors are widely used in various fields, including but not limited to:
- Automated Machinery: For precise control of the position of mechanical arms.
- Printers and Scanners: To control the movement of print heads and scanning heads.
- Robotics: For controlling the movement of robot joints.
- Medical Equipment: In some precision medical devices to control the precise movement of components.
How to Choose a Stepper Motor?
When selecting a stepper motor, consider the following factors:
- Torque Requirements: Choose the appropriate torque based on the load and speed requirements of the application.
- Step Angle: The smaller the step angle, the higher the resolution of the motor, and the finer the control.
- Speed: Choose a suitable speed range based on the needs of the application.
- Size and Shape: Choose the appropriate motor size based on the installation space and design requirements.
Conclusion
Stepper motors are versatile and suitable for applications that require precise control. Through this introduction, beginners should have a basic understanding of stepper motors and be able to start exploring their potential in various applications. With the continuous advancement of technology, the application range of stepper motors is also constantly expanding, providing strong support for modern automation and precision control.
Greensky Power Co., Ltd. is a professional manufacturer engaged in the research, development, production, sale of Stepper Motor.
If you are searching Stepper Motor for your project, please contact our sales team.

