
How do I choose a gear reducer?8 Points Should be noted!
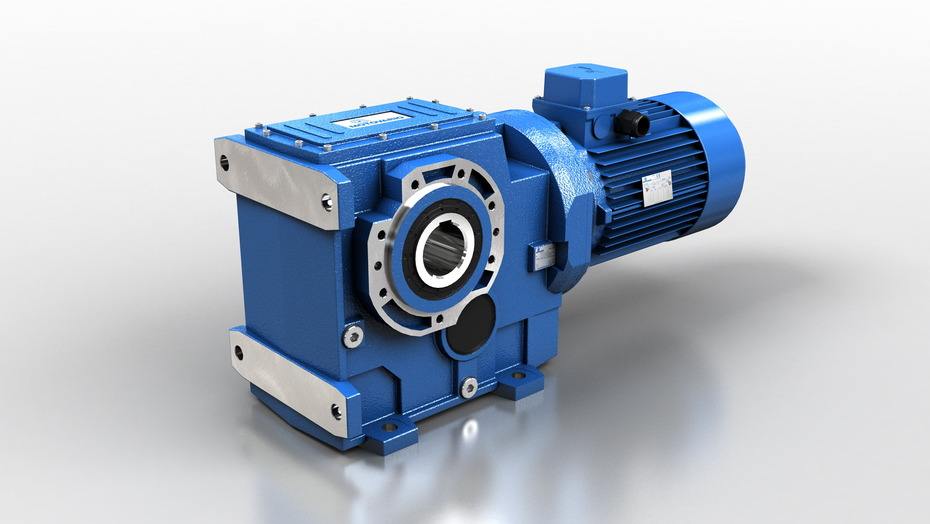
Gear reducers are an essential part of mechanical power transmission systems, being used for speed and torque conversion. Selecting the right one for an application is a fairly straightforward process. There are many types of gear reducers, different technical parameters of gear reducers, performance characteristics are also different, in the selection of reducers need to consider the reduction ratio, output torque, motor power, operating voltage, return clearance, output speed, drive motor, reduction gear box structure and other parameters.
How do I choose a gear reducer?8 Points Should be noted!
1. Reduction ratio. Reduction ratio is a more important parameter in the selection process of the reducer, he determines the motor output speed and the output speed of the reducer deceleration times, if you want to reduce the speed of one-fifth or one tenth of the column, you can select according to the reduction ratio.
2. Output torque. This is a parameter determined according to the demand of the equipment load, using the conversion between the formula to calculate the demand value of this torque is specifically how much. Reducer torque calculation formula: reducer torque = 9550 motor power ÷ motor power input rpm speed ratio * use factor.
3. Motor power. This is a relevant parameter for providing power side. If you do not know how much power the motor needs then you can submit the above two parameters to the technical staff for your selection, you can derive the power size of the motor according to the reduction ratio of the reducer and the output torque.
4. Working voltage. The working voltage of small reducer is usually between 3V-24V, this kind of micro reducer, diameter specification within 38mm, usually widely used in automotive electronics, communication equipment, smart home, robot drive, etc.; the working power of large reducer can be more than 95KW, this kind of large reducer output torque, wide range of deceleration, large volume, widely used in lifting, construction, port, mining, heavy industry steel and other heavy industrial fields.
5. Return clearance. When the output end is fixed and the input end is rotated clockwise and counterclockwise to produce the rated torque +-2% torque, there is a small angular displacement at the input end of the reducer, and this angular displacement is the return clearance. The unit is “minute”, which is one sixtieth of one degree. It is also called backlash. A mechanism that uses the speed converter of gears to decelerate the number of revolutions of a motor (motor) to the desired number of revolutions and to obtain a larger torque. In the reducer mechanism used to transmit power and motion, precision type reducer, the reduction ratio can be accurate to 0.1 rpm – 0.5 rpm.
6. Output speed. In the use of reducer often touches some users who have requirements for the speed, such as the requirement for the output of 32 rpm or 0.65 rpm, these hard-type requirements in the selection of the best or to provide the selection of technical personnel.
7. The type of drive motor. Different use environment for the motor needs are different, some are to be explosion-proof, some are to be frequency control, some are brakes, some are to be accurately positioned; reducer commonly used drive motors are DC motors, brush motors, brushless motors, stepper motors, hollow cup motors, servo motors, etc..
8. Reduction gear box structure. When choosing a reducer, consider the type of gearbox structure, the structure type is different, the technical parameters are also different; reduction gearbox drive structure type more commonly used are planetary gearbox, cylindrical gearbox, worm gearbox, parallel gearbox, etc., planetary gearbox is a precision gearbox.

