

Brushless DC Motor-BLDC Basics — TMC4671-LA
When it comes to brushless DC motors, it is necessary to mention the brush motor. Brush motors have a rather annoying disadvantage: that is “noisy”.
Because the brushes and commutation ring need to constantly friction, in order to power the armature.
So, if you want a “quiet fan”, you certainly can not choose the use of brush motor products.
And the brushes are more likely to be damaged after a long time. When the current is high, you can even see the brushes crackling and sparking when changing direction.
None of these disadvantages are found in the Brushless DC Motor-BLDC that we will introduce below!
We will introduce the brushless DC motor-BLDC (BLDC for short) from the following four aspects.
1, The advantages and disadvantages of BLDC.
2, The working principle of BLDC.
3, The control mode of BLDC.
4, The actual use of BLDC.
1、Advantages and disadvantages of BLDC
Brushless DC motor, literally, its biggest feature is “brushless”, which means no brushes.
Because there is no brush, it is very perfect to avoid the several shortcomings of the brush motor. So in turn, its main advantages are.
1, long life; 2, can be silent; 3, high efficiency (low loss); 4, smaller size; 5, high stability.
- 1. Brushless DC motors operate in a wide range of speeds, at any speed, can be run at full power.
- 2. Outstanding overload capacity and high operating efficiency.
- 3. Brushless DC motor is smaller, wider range of application and higher power density compared to brush motor.
- 4. Compared with the drive control of asynchronous motor, the drive is more simple.
- 5. Brushless DC motor has no mechanical commutator structure and is enclosed inside, which can avoid flying dust particles from entering the inside of the motor and leading to various problems and high reliability.
- 6. The external characteristics are better, low speed operation, can output large torque, can provide a relatively large starting torque.
Disadvantages of BLDC
Let’s go back to the question left in front: what are the disadvantages of BLDC?
I believe you have already guessed: we have spent so much space to talk about the control method of BLDC, enough to see the difficulty of its control, compared to the brush motor, is a lot higher!
So the biggest disadvantage of BLDC is its high control difficulty and high price of driving ESC (Electronic Speed Control, ESC for short).
It also has a disadvantage that the BLDC due to the inductive resistance, the start will be accompanied by jitter, unlike the brush motor start so smooth.
At present, there are three mainstream brushless motor control methods as follows.
1、Square wave control.
Also known as trapezoidal wave control, 120° control, 6-step commutation control
Square wave control method has the advantage of simple control algorithms, low hardware costs, the use of ordinary performance of the controller will be able to obtain a high motor speed.
The disadvantage is that the torque fluctuation is large, there is a certain amount of current noise, and the efficiency does not reach the maximum. Square wave control is suitable for applications that do not require high motor rotation performance.
Square wave control uses a Hall sensor or a sensorless estimation algorithm to obtain the position of the motor rotor, and then performs six commutations (one every 60°) based on the rotor position within a 360° electrical cycle.
At each commutation position the motor outputs a force in a specific direction, so it can be said that the position accuracy of square wave control is electrical 60°.
Since the phase current waveform of the motor is close to square wave in this way of control, it is called square wave control.

2、Sine wave control.
The sine wave control method uses the SVPWM wave, and the output is a 3-phase sine wave voltage, and the corresponding current is also a sine wave current.
This method does not have the concept of square wave control commutation, or think that an electrical cycle in an infinite number of commutation.
Obviously, compared with square wave control, sine wave control has less torque fluctuation and less current harmonics, which makes the control feel more “delicate”, but the performance requirements of the controller are slightly higher than square wave control, and the efficiency of the motor cannot be maximized.
3、FOC control

Also known as vector frequency conversion, magnetic field vector directional control
Sine wave control realizes the control of voltage vector, indirectly realizes the control of current size, but cannot control the direction of current.
The FOC control method can be considered as an upgraded version of sine wave control, which realizes the control of current vector, i.e., the vector control of the motor stator field.
Since the direction of the stator field is controlled, the stator field and the rotor field can be kept at 90° at all times, and the maximum torque output at a certain current can be achieved.
The advantages of FOC control method are: low torque fluctuation, high efficiency, low noise and fast dynamic response.
The disadvantages are: higher hardware cost, higher requirements for controller performance, and motor parameters need to be matched.
FOC is currently the best choice for efficient control of brushless DC motors (BLDC) and permanent magnet synchronous motors (PMSM).
FOC precisely controls the magnitude and direction of the magnetic field, which makes the motor torque smooth, low noise, high efficiency, and has a high-speed dynamic response.
Due to the obvious advantages of FOC, many companies are now gradually replacing the control of traditional products with FOC for numerous applications.
Germany Trinamic has a servo control chip with magnetic field vector control (FOC) — TMC4671-LA
– Torque control mode
– Speed control mode
– Position control mode
– Current control refresh frequency and maximum PWM frequency of 100KHz (refresh frequency for speed and position control can be configured as a multiple of the current current refresh frequency)

The TMC4671 is a fully integrated servo control chip that provides magnetic field directional control for brushless DC motors, permanent magnet synchronous motors, 2-phase stepper motors, brushed DC motors and voice coil motors.
All control functions are integrated into the hardware. With integrated ADCs, position sensor interface, and position differential, this full-featured servo controller is suitable for a variety of servo applications.
2、The working principle of BLDC
BLDC is a kind of motor, so its most basic composition is inseparable from the stator and rotor.
The stator of a brush motor is a permanent magnet, while its rotor is an energized coil (winding). As shown in the figure below.

But for the BLDC, the opposite is true!
The stator (stator) of a BLDC is an energized coil, while the rotor is a permanent magnet!

From “Maxwell-Ampere’s Law”, we can know that the space near the energized coil will generate a magnetic field. And the direction of the magnetic field distribution, we can use the “right-hand rule” to derive.
In fact, this is what we often call “electromagnet”!
Then the next thing is simple, what are the properties of magnets?
The same sex repels each other, the opposite sex attracts each other!
So, we just need to give the coil on the stator to access the appropriate direction of the current, that is, so that the magnetic poles of the electromagnet direction.
So, we just need to connect the coil on the stator to the appropriate direction of current, that is, let the direction of the magnetic poles of the electromagnet and the direction of the magnetic poles of the permanent magnet correspond exactly, not to be able to repel, or attract the rotor to do rotational motion.
Optimization of the stator
The above driving method, i.e. energizing each coil individually in sequence, is feasible but too cumbersome and inefficient.
Therefore, the actual BLDC will combine those six coils two by two and divide them into three windings, A, B, and C, as follows.

This way we can drive two electromagnets at the same time, which immediately doubles the efficiency.
But this is only with the magnet “attraction” characteristics, do not forget that the magnet also “repulsion” characteristics.
If we drive another set of coils at the same time, so that the previous set of coils “attract” the rotor when the other set of coils “repel” the rotor, then our rotor will get a higher driving force!
So far, this model has started to approach the actual BLDC product.
But for the above model
However, for the above model, we need to supply two windings with two sets of power in opposite directions to achieve the effect of “attraction” and “repulsion” at the same time.
This is too complicated and costly for practical applications.
Next we will talk about the “BLDC control method”, which will solve the above problem.
3、BLDC’s control method
The original A, B, C three windings are independent, so it is very troublesome to control them.
Then if we connect the three windings of A,B,C together and put together a “star arrangement”, what will be the result?

Originally three windings, leading to six lines; now lead to the line reduced to only three lines, so how to achieve the same control effect with six lines so connected?
The following figure.
The positive side of the power supply is connected to the upper right corner of the A winding input, while the negative side of the power supply is connected to the lower left corner of the B winding output.
This time A winding and B winding is driven at the same time, and its polarity is exactly opposite, to achieve the same effect when the three windings are driven independently!
So by following this sequence: AB-AC-BC-BA-CA-CB, the six beats, and cycling the stator windings in turn, the rotor can keep on rotating!
Six electronic switches can be used to drive these six beats, as follows.
Position detection
Although we already know how to control the six beats of the rotor.
But have you found a new problem: if you don’t know the position of the rotor, how do you know when to drive which winding?
So we have to know the current position of the rotor!
And the position of the rotor is detected in two general ways.
1, Hall sensor detection method.
The following figure, put in the stator H1,H2,H3, three Hall sensors, you can know the current exact position of the stator.
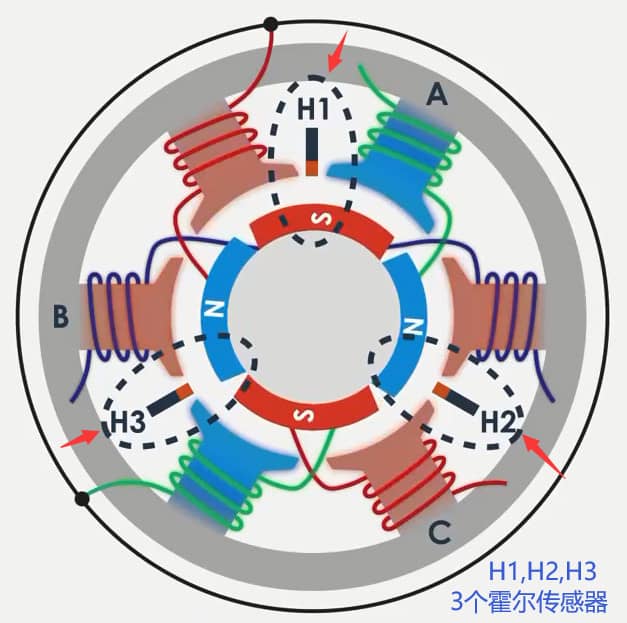
Hall sensor output with high and low levels to indicate.

2, reverse electromotive force detection method
Back EMF detection method is based on the principle of electromagnetic induction.
When the magnetic field (magnetic flux) around an unenergized winding changes, an electric potential is induced in this winding.
By detecting the magnitude and direction of this electric potential, we can also know the current position of the stator.

These two detection methods have their advantages and disadvantages.
Hall sensor detection is a little more accurate, but also more costly.
On the contrary, the reverse electromotive force detection method is more economical, but slightly less accurate.
Inner rotor or outer rotor
BLDC has two types of structure: the rotor inside is called inner rotor BLDC; on the contrary, the rotor outside is called outer rotor BLDC.

Relatively speaking, the outer rotor BLDC is used more often.
The main reason is that the outer rotor BLDC is more stable in mechanical structure. This is because the motor rotor has a tendency to expand outward due to centrifugal force under high speed operation.
So the inner rotor BLDC needs very high mechanical precision to ensure that the rotor and stator will not fight.
But if the distance reserved is too far, it will lead to magnetic leakage and affect the overall efficiency of the motor.
But this is not a problem with the outer rotor BLDC, because the outer rotor is naturally unaffected by expansion.
4、The practical application of BLDC
Then let’s take a look at the next, the actual application scenarios of BLDC.
1, silent cooling fan air cooling is the first choice for many devices cooling.
For example, many of the main “silent” chassis on the market, if the use of air cooling, the cooling fan inside is basically the use of BLDC.
The base used to dissipate heat to the laptop is also commonly used BLDC, in addition to some large ventilation cooling system inside, the use of BLDC fans. There are also high-speed air blower and other products.
2, Multi-axis drones are used in larger power BLDC, adapted to the appropriate ESC (ESC), and then use PWM to control the BLDC speed is very convenient.

3, Power tools and other products, such as electric batches, domestic production of electric wrenches are basically used BLDC, and most of the hand drill as well.
Mainly because of the high efficiency of BLDC, and make the battery-powered power tools last longer. Another point is that the torque output of brushless motor is very stable.
There are also refrigerator compressors, freezer cooling fans, as well as air purifiers, vacuum cleaners/sweepers, fascia guns, etc., which are very hot in recent years, most of which are driven by BLDC.

