

步进电机的工作原理: 详细指南
步进电机 是一种电动机,可将电脉冲转换为精确的机械运动. 它们广泛应用于需要高精度和准确度的各种应用, 比如机器人技术, 数控机床, 和 3D 打印机. 本文将深入探讨其内部工作原理 步进电机, 探索他们的建设, 操作原理, 以及影响其绩效的因素.
步进电机的构造
步进电机由几个关键部件组成:
- 定子: 电机的静止部分, 由多个电磁线圈组成, 称为定子绕组.
- 转子: 旋转部分, 通常由叠片铁芯制成,其齿与定子磁场对齐.
- 轴: 连接转子与负载的中心轴.
- 轴承: 支撑转子并减少旋转时的摩擦.
- 端盖: 保护内部组件并将其固定到位.
操作原理
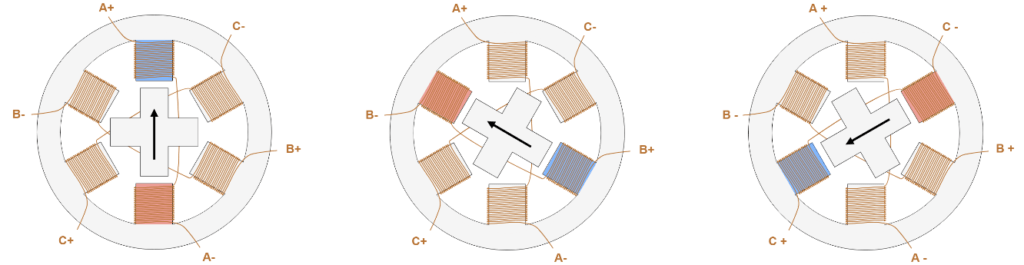
的操作 步进电机 基于电磁学的基本原理:
- 电磁感应: 当电流流过定子绕组时, 它产生一个与转子磁场相互作用的磁场.
- 磁力锁: 转子与定子产生的磁场对齐, 锁定到位.
- 顺序激活: 通过顺序激活不同的定子绕组, 这 电机可控制 磁场的方向和大小, 使转子以精确的步数旋转.
控制机制
步进电机通过一系列电信号进行控制:
- 脉冲信号: 电机接收到的每个脉冲都会使其移动一步.
- 方向控制: 旋转方向由定子绕组通电顺序决定.
- 速度控制: 电机的速度与输入脉冲的频率成正比.
步距角和分辨率
步距角是电机每走一步转动的角度. 由定子和转子的设计决定:
- 全步: 运动的基本单位, 通常 1.8 标准两相步进电机的度数.
- 微步: 一种允许电机采取比全步距角更小的步距的技术, 提高平滑度和分辨率.
驱动模式
步进电机可以以不同的模式驱动,以实现各种性能特征:
- 全步模式: 各定子相按顺序通电, 产生最大步距角.
- 半步模式: 在一相通电和两相通电之间交替, 将步距角减半.
- 微步模式: 调制定子绕组中的电流以创建中间步骤, 提供更好的控制和更平稳的运动.
细分控制
细分, 或微步进, 是一种提高步进电机分辨率的方法:
- 脉冲细分: 输入脉冲被分成更小的段, 允许电机以较小的增量移动.
- 微步进驱动器: 专用控制器可调节定子绕组中的电流以实现更精细的步骤.
应用领域
步进电机用于多种应用 由于其精度和可靠性:





优点和局限性
步进电机具有多种优势, 如:
- 高精度: 能够高精度控制位置和运动.
- 高可靠性: 不需要反馈系统, 因为电机的位置本质上是已知的.
- 低维护成本: 运动部件很少,减少了机械故障的可能性.
然而, 他们也有一些限制:
- 效率: 由于其运行性质,高速时效率可能较低.
- 扭矩脉动: 电机步进时扭矩输出的变化, 这会影响顺利运行.
结论
步进电机是一种多功能且可靠的解决方案,适用于需要精确控制运动的应用. 通过了解它们的构造, 手术, 和控制机制, 工程师可以有效地利用步进电机的力量来满足其项目的需求. 随着技术的进步, 步进电机的性能和能力不断提高, 为它们在各个行业的使用开辟了新的可能性.
总之, 步进电机 通过电磁感应的组合将电脉冲转换为机械步骤来工作, 顺序激活, 和精确的控制机制. 它们提供高精度和准确度的能力使它们在许多现代技术中不可或缺.
绿天电力公司, 有限公司. 是一家从事研究的专业制造商, 发展, 生产, 销售步进电机.
如果您正在为您的项目搜索步进电机, 请联系我们的销售团队.

