

了解步进电机基础知识
介绍
步进电机是一种将电脉冲信号转换为角位移或直线位移的电磁装置. 这类电机因其控制精确且不需要反馈系统的优点在自动化控制领域非常常见. 本文将介绍基本概念, 工作原理, 类型, 以及步进电机对初学者的应用.
什么是步进电机?
步进电机是一种数字控制电机,通过数字信号控制电机的旋转. 每个电脉冲都会使电机旋转固定角度, 称为步距角. 这个特点 步进电机 使得它们在需要精确位置控制的情况下非常有用.
步进电机的工作原理
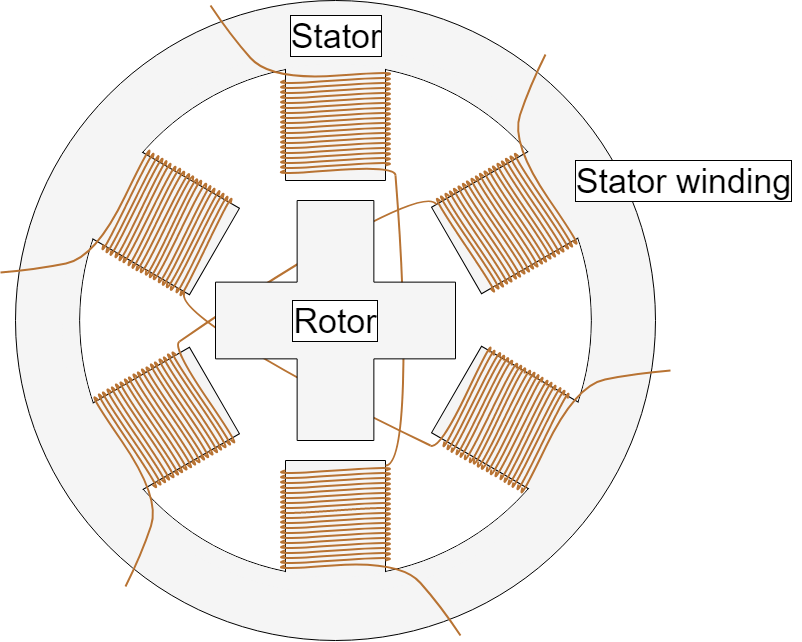
与所有电机一样, 步进电机还包括固定部分 (定子) 和一个移动部件 (转子). 定子有一个齿轮状的突起,上面缠绕着线圈, 而转子是永磁体或可变磁阻铁芯. 稍后我们将更深入地了解不同的转子结构. 数字 1 显示具有可变磁阻铁芯转子的电机的横截面.
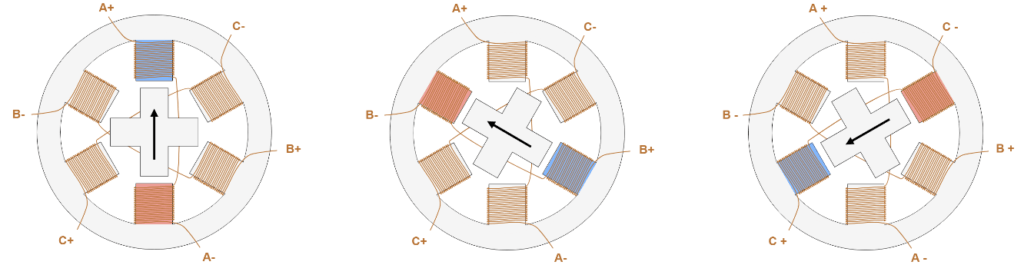
步进电机的基本工作原理是: 一个或多个定子的相通电, 电流通过线圈会产生磁场, 并且转子将与磁场对齐; 依次向不同相施加电压, 转子将旋转特定角度并最终到达所需位置.
数字 2 显示这是如何工作的. 第一的, 线圈A通电并产生磁场, 与转子对齐; 线圈B通电后, 转子顺时针旋转 60° 以与新磁场对齐; 当线圈C通电时也会发生同样的情况. 下图中定子齿的颜色表示定子绕组产生的磁场方向.
步进电机的类型和结构
步进电机的性能 (是否是分辨率/步长, 速度或扭矩) 受施工细节影响, 同时, 这些细节也可能影响电机的控制方式. 实际上, 并非所有步进电机都具有相同的内部结构 (或建筑), 因为不同的电机有不同的转子和定子配置.
转子
步进电机基本上有三种类型的转子:
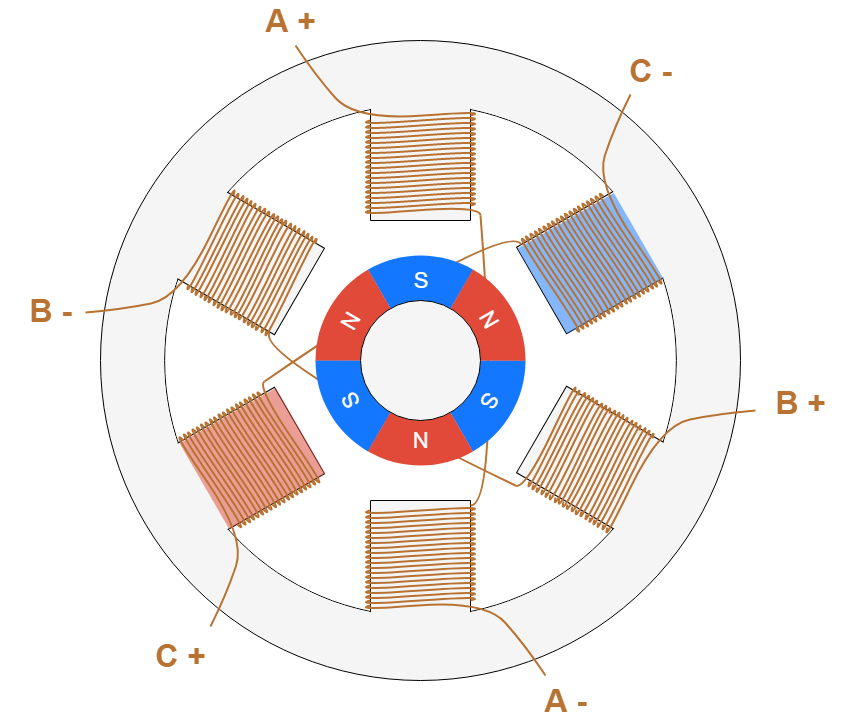
- 永磁转子: 转子是永磁体, 与定子电路产生的磁场对齐. 该转子保证良好的扭矩并具有制动扭矩. 这意味着无论线圈是否通电, 电机可以抵抗 (即使不是很强烈) 位置的变化. 然而, 与其他转子类型相比, 其缺点是速度和分辨率都较低. 数字 3 显示永磁步进电机的横截面.
- 变磁阻转子: 转子由铁芯制成,具有特殊形状,可以与磁场对齐 (见图 1 和 2). 这种转子更容易实现高速和高分辨率, 但其产生的扭矩一般较低并且没有制动扭矩.
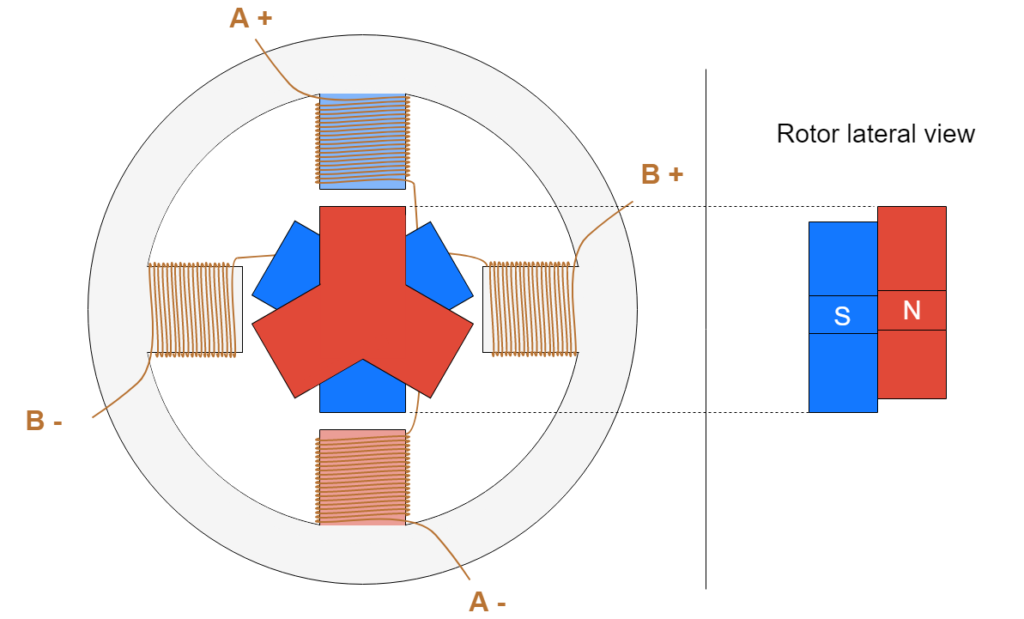
- 混合转子: 该转子结构特殊, 它是永磁体和可变磁阻转子的混合体. 转子上有两个轴向磁化的磁帽, 磁帽上有交替的小齿. 这种配置使电机兼具永磁转子和可变磁阻转子的优点, 尤其是高分辨率, 高转速、高扭矩. 当然, 更高的性能要求意味着更复杂的结构和更高的成本. 数字 3 显示了该电机结构的简化示意图. 当线圈A通电时, 转子N磁帽的小齿与磁化S的定子齿对齐. 同时, 由于转子的结构, 转子S磁帽与磁化N的定子齿对齐. 虽然步进电机的工作原理是一样的, 实际电机的结构更为复杂, 并且齿数比图中所示的多. 大量的齿可以让电机获得很小的步进角, 小至 0.9°.
定子
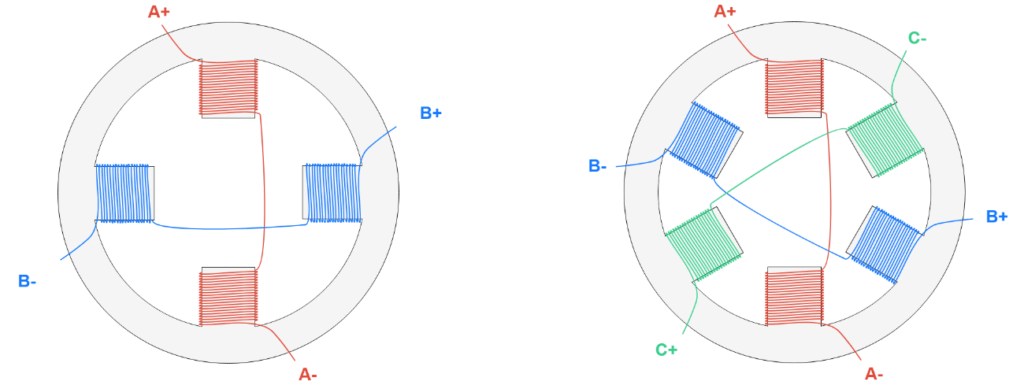
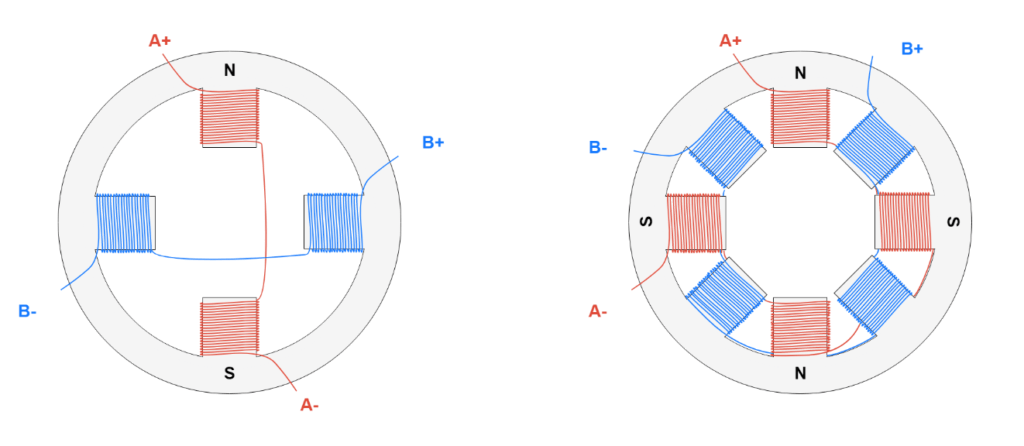
定子是电机的一部分,负责产生与转子对齐的磁场. 定子电路的主要特性与其相数有关, 极数和电线配置. 相数就是独立线圈的数量, 极数代表每相占用的主要齿对. 最常用的是两相步进电机, 而三相和五相电机则不太常用 (见图 5 和 6).
步进电机的特点
- 精确控制: 步进电机可以精确控制角度和速度.
- 无需反馈: 由于其工作原理, 步进电机 通常不需要位置反馈系统.
- 易于控制: 步进电机可以通过简单的脉冲信号进行控制.
- 低速高扭矩: 低速时, 步进电机可以提供大扭矩.
步进电机的应用
步进电机 广泛应用于各个领域, 包括但不限于:
- 自动化机械: 用于精确控制机械臂的位置.
- 打印机和扫描仪: 控制打印头和扫描头的移动.
- 机器人学: 用于控制机器人关节的运动.
- 医疗设备: 在一些精密医疗设备中控制部件的精确运动.
如何选择步进电机?
什么时候 选择步进电机, 考虑以下因素:
- 扭矩要求: 根据应用的负载和速度要求选择合适的扭矩.
- 步距角: 步距角越小, 电机的分辨率越高, 并且控制得越精细.
- 速度: 根据应用需求选择合适的速度范围.
- 尺寸和形状: 根据安装空间和设计要求选择合适的电机尺寸.
结论
步进电机 用途广泛,适合需要精确控制的应用. 通过这个介绍, 初学者应该对步进电机有基本的了解,并能够开始探索其在各种应用中的潜力. 随着科技的不断进步, 步进电机的应用范围也在不断扩大, 为现代自动化和精密控制提供有力支撑.
绿天电力公司, 有限公司. 是一家从事研究的专业制造商, 发展, 生产, 销售步进电机.
如果您正在为您的项目搜索步进电机, 请联系我们的销售团队.

