

为机器人提供动力: 适用于机器人应用的高扭矩步进电机
机器人技术不再局限于科幻幻想——它正在重塑工厂, 医院, 和日常生活. 这场革命的核心在于高扭矩步进电机, 旨在提供精确度, 可靠性, 和传统执行器不足的功率密度. 本文探讨了这些电机如何克服机器人技术的独特挑战,并为设计人员重点介绍了尖端解决方案.
为什么高扭矩步进机在机器人领域占据主导地位
机器人系统需求:
- 精准定位 (例如, 外科 机器人 要求±0.05mm精度)
- 高扭矩惯量比用于快速启动/停止
- 耐用性在恶劣环境下 (灰尘, 水分, 温度波动)
混合式步进电机 在这里表现出色, 结合永磁体和齿形转子,提供卓越的角度分辨率和扭矩一致性,这对于数控铣削或装配线焊接等重复性任务至关重要.
顶级机器人高扭矩步进技术
基于领先制造商的创新:
1. MOONS’ PowerPlus 系列
- 扭矩范围: 0.7–35 牛米 (NEMA 23–34 框架)
- 关键创新: 25– 扭矩比之前高出 40%. 标准, 3D 打印机和医疗机器人的理想选择.
- 机器人健身: 针对自动导引车的动态有效负载进行了优化 (AGV).
2. 科尔摩根 T 系列
- 扭矩密度: 行业领先, 具有共振阻尼算法.
- 应用领域: 协作机器人 (协作机器人) 和精度 需要武器 平滑运动.
3. JVL IP67 级电机
- 坚固耐用的设计: 可承受食品加工机器人的冲洗.
- 扭矩范围: 0.01–50 牛米 (NEMA 08–53), 实现关节臂的紧凑关节设计.
4. 太平洋科学微步进电机
- 解决: 200 步数/转 + 编码器反馈确保闭环精度.
- 使用案例: 手术机器人需要 12 牛米扭矩和 2,500 转速.
桌子: 高扭矩步进电机比较
| 系列 | 扭矩范围 | 主要特点 | 最适合 |
|---|---|---|---|
| MOONS 的 PowerPlus | 0.7–35 牛米 | 40% 更高的扭矩效率 | AGV, 3数码打印机 |
| 科尔摩根 T 系列 | 风俗 | 抗共振控制 | 协作机器人, 精密武器 |
| JVL紧凑型 | 0.01–50 牛米 | IP67防护等级 | 食品/医疗机器人 |
| 太平洋科学 | 取决于 12 牛米 | 0.035 kg·m² 惯量 | 手术/成像机器人 |
关键机器人应用

1. 工业自动化
- 挑战: 重复举升 (例如, 20公斤有效载荷) 无位置漂移.
- 解决方案: 没有 42 马达 (例如, 阿纳海姆自动化公司 5,700 盎司英寸型号) 带双轴扭矩分配.
2. 医疗机器人
- 要求: 注射泵或手术臂的亚毫米精度.
- 电机技术: 具有 256 倍微步进的闭环混合动力 (例如, 万泰20BY) 实现无震颤运动.
3. 移动的 & 服务机器人
- 需要: 电池供电机器人的能源效率 (例如, 清洁机器人).
- 创新: 再生驱动器将动能转化为电池充电.
4-机器人设计师的步骤选择指南
- 扭矩-速度曲线
- 计算峰值/连续扭矩 在运行转速下 (例如, 15 机器人焊机的保持扭矩 Nm).
- 环境评级
- 优先考虑IP54+ (灰尘/湿气) 适用于户外机器人或 IP67 适用于冲洗区域.
- 控制兼容性
- 确保 TMC2209/TMC2225 驱动程序支持 StealthChop™ 降噪.
- 认证证书
- 验证平均无故障时间 >25,000 小时和 ISO 9001 生命周期可靠性制造.
高扭矩步进电机与伺服电机在机器人应用中的技术比较
1. 核心性能指标比较
| 公制 | 高扭矩步进电机 | 伺服电机 | 技术基础 |
|---|---|---|---|
| 扭矩特性 | 低速高扭矩 (例如, 0.22–50 牛·米), 但是扭矩下降 40–60% >500 转速 | 持续的 不同速度下的扭矩 (例如, 0–3,000 转/分钟 12 牛顿·米), 300% 过载能力 | 步进器依靠磁阻; 伺服系统使用磁场定向控制 (FOC) |
| 定位精度 | 开环: ±0.9° (1.8° 步距角); **闭环: ±0.05°** | **±0.01°** (带 17 位编码器) | 伺服系统通过实时反馈纠正错误; 步进器依靠脉冲计数 |
| 动态响应 | 200–400 毫秒加速 (0→100转/分钟) | <5 毫秒加速度 (0→3,000转/分钟) | 伺服闭环实现毫秒级调整 |
| 电源效率 | 40–60% (高效于 低速; 高速时铜损占主导地位) | 80–90% (仅在运动/保持期间供电) | 步进器消耗恒定电流; 舵机动态调整功率 |
| 扭矩密度 | 20–30牛·米/公斤 (标准); 最多 48 牛·米/公斤 (例如, 本源P1010) | 15–25牛·米/公斤 (最多35 牛·米/公斤 使用稀土磁铁) | 舵机使用高强度磁铁; 步进器优化绕组 |
2. 特定应用的适用性
工业机器人 (例如, 联合驱动)
- 步进机优点:
具有成本效益低速精度 (例如, 装配线上的螺丝驱动). 例子: 万泰20BY实现±0.05 mm 重复性于40% 成本更低比同等伺服系统. - 伺服优势:
高速运转 (>1 多发性硬化症) 和瞬时负载响应. 例子: 科尔摩根 T 系列可根据负载变化进行调整0.1s 与 36 N·m 过载扭矩.
医疗/手术机器人
- 步进器的限制:
低速振动有影响精细任务的风险 (例如, 显微外科), 需要额外的阻尼器. - 伺服优势:
零振动控制配备 17 位编码器0.001 毫米精度 (例如, 达芬奇手术臂).
移动机器人 (例如, AGV, 四足动物)
- 步进创新:
本源P1010模块 (120 峰值扭矩N·m) 为四足机器人提供连续跳跃的动力30% 降低能源消耗比伺服系统. - 伺服必要性:
即时扭矩补偿用于地形适应 (例如, 20° 倾斜攀登) 防止失步.
3. 成本 & 终身经济学
| 成本因素 | 高扭矩 步进电机 | 伺服电机 |
|---|---|---|
| 初始成本 | 80–150 (400W系统) | 350–500 (400W系统) |
| 能源成本 | 高的 (恒定电流消耗) | 30–50% 降低 (自适应功率) |
| 维护成本 | 低的 (简单的机制) | 更高 (编码器故障 >15% 超过 5 年) |
| 投资回报期 | <1 年 (低速项目) | 2–3 年 (高利用率) |
✅选择规则: 踏步机低速, 预算敏感的 项目; 伺服系统高速, 24/7 工业系统.
4. 混合技术 & 选择框架
混合解决方案
- 闭环步进器:
集成编码器 (例如, 特里纳克) 提高准确度±0.05°,成本降低 15%比伺服系统. - 集成伺服系统:
驱动电机组合 (例如, 乙&R ACOPOS电机) 减小尺寸40%.
决策工作流程
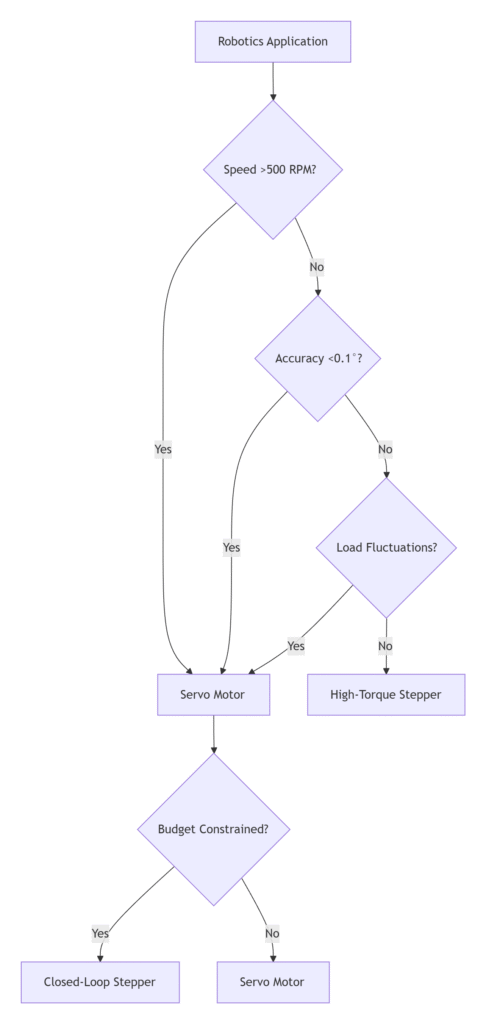
高扭矩步进机擅长于低速, 静载荷, 成本驱动 机器人技术 (例如, 3D 打印机轴, 轻型AGV), 而伺服系统占主导地位高速, 动态负载 应用 (例如, 手术机器人, 工业武器). 未来融合闭环 步进器和紧凑型伺服系统 将模糊性能界限——选择取决于动态运营需求和总生命周期成本.
未来趋势: 下一代机器人驱动
- 集成编码器: 17-位绝对编码器可实现实时纠错 (<1微秒延迟).
- 人工智能驱动控制: 机器学习预先调整扭矩输出, 减少能源浪费 30%.
- 压电步进器: 用于微型手术机器人的无摩擦陶瓷执行器.
结论: 扭矩作为机器人创新的引擎
从完成生产目标的装配线到在手术室挽救生命的机器人, 高扭矩步进机是不知名的英雄. 正如科尔摩根的工程师所说: “在机器人技术领域, 扭矩精度不是可选的——它是运动本身的语言。”
探索我们的机器人优化系列:
- 没有 17/23 高扭矩混合动力: 40% 更多扭矩, IP65 等级,适用于恶劣环境.
- 闭环伺服步进机: 17-位编码器 + 零齿槽算法.
为您的下一个设计请求 3D 模型或扭矩-速度曲线.
绿天电力公司, 有限公司. 是一家从事研究的专业制造商, 发展, 生产, 销售高扭矩步进电机.
如果您正在寻找高扭矩 步进电机 用于机器人项目, 请联系我们的销售团队.

