

ロボットの動力: ロボット用途向けの高トルクステッピングモーター
ロボット工学はもはや SF ファンタジーに限定されず、工場を再構築しています, 病院, そして日常生活. この革命の中心には、高トルクステッピングモーター, 精度を実現するように設計, 信頼性, 従来のアクチュエータでは不十分な出力密度. この記事では、これらのモーターがロボット特有の課題をどのように克服するかを検討し、設計者向けの最先端のソリューションを紹介します。.
高トルクステッパーがロボット工学を支配する理由
ロボットシステムの需要:
- 精密な位置決め (例えば, 外科用 ロボット ±0.05mmの精度が必要)
- 高いトルク対慣性比迅速なスタート/ストップ用
- 耐久性過酷な環境で (ほこり, 水分, 温度の変動)
ハイブリッドステッパーモーター ここでエクセル, 永久磁石と歯付きローターを組み合わせて、優れた角度分解能とトルクの一貫性を実現します。これは、CNC フライス加工や組立ライン溶接などの反復作業に不可欠です。.
ロボット工学向けのトップの高トルクステッパーテクノロジー
大手メーカーのイノベーションに基づく:
1. MOONSのPowerPlusシリーズ
- トルク範囲: 0.7–35Nm (NEMA 23 ~ 34 フレーム)
- 主要なイノベーション: 25–40% 高いトルクと比較. 標準, 3Dプリンターや医療ロボットに最適.
- ロボティクスフィット: 無人搬送車の動的なペイロード向けに最適化 (AGV).
2. コルモーゲン T シリーズ
- トルク密度: 業界をリードする, 共振減衰アルゴリズムを使用.
- アプリケーション: 協働ロボット (協働ロボット) そして精度 武器が必要 スムーズな動き.
3. JVL IP67 定格モーター
- 頑丈な設計: 食品加工ロボットの洗浄に耐えます.
- トルク範囲: 0.01–50 nm (NEMA 08–53), 多関節アームでのコンパクトなジョイント設計を可能にする.
4. Pacific Scientific マイクロステッピング モーター
- 解決: 200 ステップ/回転 + 閉ループ精度のためのエンコーダフィードバック.
- 使用事例: 手術ロボットの必要性 12 Nmトルクと 2,500 回転数.
テーブル: 高トルクステッピングモーターの比較
| シリーズ | トルク範囲 | 重要な機能 | 最適な用途 |
|---|---|---|---|
| MOONSのパワープラス | 0.7–35Nm | 40% より高いトルク効率 | AGV, 3Dプリンター |
| コルモーゲン T シリーズ | カスタム | 共振防止制御 | コボット, 精密アーム |
| JVLコンパクト | 0.01–50 nm | IP67保護 | 食品・医療ロボット |
| パシフィック・サイエンティフィック | まで 12 Nm | 0.035 kg・m²慣性 | 外科/画像処理ロボティクス |
重要なロボット工学アプリケーション

1. 産業オートメーション
- チャレンジ: 繰り返し持ち上げる (例えば, 20ペイロードkg) 位置ずれなし.
- 解決: ありません 42 モーター (例えば, アナハイム オートメーションの 5,700 オンスインモデル) トルクを分割するためのデュアルシャフト付き.
2. 医療ロボット
- 要件: シリンジポンプや手術用アームにおけるミリメートル未満の精度.
- モーターテック: 256x マイクロステッピングを備えた閉ループ ハイブリッド (例えば, ワンタイ20BY) 震えのない動きのために.
3. モバイル & サービスロボット
- 必要: バッテリー駆動ボットのエネルギー効率 (例えば, お掃除ロボット).
- 革新: 運動エネルギーをバッテリーの充電に変換する回生ドライブ.
4-ロボット設計者のためのステップ選択ガイド
- トルク-速度プロファイル
- ピーク/連続トルクを計算 動作回転数で (例えば, 15 ロボット溶接機の保持トルク Nm).
- 環境評価
- IP54+を優先 (ほこり/湿気) 屋外ボット用、または洗浄ゾーン用 IP67.
- コントロールの互換性
- StealthChop™ ノイズ リダクションに対する TMC2209/TMC2225 ドライバーのサポートを確保.
- 認証
- MTBFの検証 >25,000 時間とISO 9001 ライフサイクルの信頼性を重視した製造.
ロボット工学アプリケーションにおける高トルクステッピングモーターとサーボモーターの技術比較
1. コアパフォーマンスメトリクスの比較
| メトリック | 高トルクステッピングモーター | サーボモーター | 技術的根拠 |
|---|---|---|---|
| トルク特性 | 低速でも高トルク (例えば, 0.22–50N・m), しかし、トルクは 40 ~ 60% 低下します。 >500 回転数 | 一貫性のある 速度別のトルク (例えば, 0–3,000 RPM 12 N・m), 300% 過負荷容量 | ステッパーは磁気抵抗に依存します; サーボはフィールド指向制御を使用します (FOC) |
| 位置決め精度 | オープンループ: ±0.9° (1.8°ステップ角); **閉ループ: ±0.05°** | ** ±0.01°** (17ビットエンコーダ付き) | サーボはリアルタイムのフィードバックによりエラーを修正します; ステッパーはパルスカウントに依存します |
| 動的応答 | 200–400msの加速 (0→100RPM) | <5 ミリ秒加速度 (0→3,000RPM) | サーボ閉ループによりミリ秒単位の調整が可能 |
| 電力効率 | 40–60% (効率的 低速; 高速では銅損が支配的になる) | 80–90% (動作中/保持中にのみ電力が供給されます) | ステッパーは定電流を消費します; サーボは電力を動的に調整します |
| トルク密度 | 20–30N・m/kg (標準); まで 48 n・m/kg (例えば, ベンユアン P1010) | 15–25N・m/kg (まで35 n・m/kg希土類磁石を使用) | サーボには高強度の磁石が使用されています; ステッパーは巻線を最適化します |
2. アプリケーション固有の適合性
産業用ロボット (例えば, 関節作動)
- ステッパーの利点:
費用対効果が高い低速精度 (例えば, 組立ラインでのネジ締め). 例: ワンタイ20BYが達成±0.05 mmの再現性で40% 低コスト同等のサーボよりも. - サーボの利点:
高速動作 (>1 MS) と瞬時負荷応答. 例: Kollmorgen T シリーズは、負荷の変化に合わせて調整します0.1sと 36 N・m過負荷トルク.
医療/手術用ロボット
- ステッパーの制限事項:
低速振動は繊細な作業に影響を与える危険性があります (例えば, 顕微手術), 追加のダンパーが必要. - サーボの優位性:
ゼロ振動制御17 ビットエンコーダを使用すると、0.001 mm精度 (例えば, ダヴィンチの手術用アーム).
移動ロボット (例えば, AGV, 四足動物)
- ステッパーのイノベーション:
BenyuanのP1010モジュール (120 N・m ピークトルク) 四足ロボットに動力を与え、連続ジャンプを可能にします30% エネルギー使用量の削減サーボよりも. - サーボの必要性:
瞬間トルク補償地形適応のため (例えば, 20° インクラインクライミング) ステップロスを防ぎます.
3. 料金 & 生涯経済学
| コスト要因 | 高トルク ステッピングモーター | サーボモーター |
|---|---|---|
| 初期費用 | 80–150 (400Wシステム) | 350–500 (400Wシステム) |
| エネルギーコスト | 高い (定電流引き込み) | 30–50% 低い (適応力) |
| 維持費 | 低い (単純な力学) | より高い (エンコーダの故障 >15% 以上 5 年) |
| ROI期間 | <1 年 (低速プロジェクト) | 2–3年 (高い使用率) |
✅選択ルール: ステッパー低速, 予算に敏感なプロジェクト; 用サーボ高速, 24/7 産業システム.
4. ハイブリッド技術 & 選択の枠組み
ハイブリッド ソリューション
- クローズドループステッパー:
統合されたエンコーダ (例えば, トライナミック) 精度を高める±0.05° を 15% 低いコストで実現サーボよりも. - 統合サーボ:
駆動モーターのコンボ (例えば, B&R ACOPOSモーター) サイズを小さくする40%.
意思決定ワークフロー
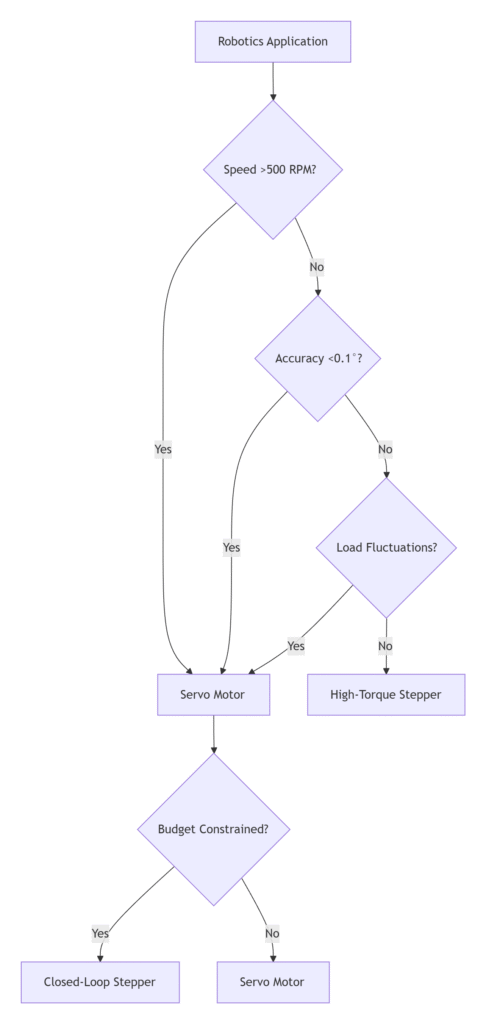
高トルクステッパーは次の点で優れています低速, 静荷重, コスト重視のロボット工学 (例えば, 3D プリンタ軸, 軽量AGV), サーボが支配的である一方で、高速, 動的負荷アプリケーション (例えば, 手術ロボット, 工業用武器). 閉ループの将来のコンバージェンス ステッパーとコンパクトサーボ パフォーマンスの境界があいまいになるため、選択は次の点に左右されます動的な運用上のニーズと総ライフサイクルコスト.
将来の傾向: 次世代ロボットの作動
- 統合されたエンコーダ: 17-リアルタイムエラー訂正を可能にするビットアブソリュートエンコーダ (<1μsの遅延).
- AIによる制御: 機械学習によりトルク出力を先制的に調整, エネルギーの無駄を削減することで、 30%.
- 圧電ステッパー: 微細手術ロボット用の無摩擦セラミックアクチュエータ.
結論: ロボット革新のエンジンとしてのトルク
生産目標を達成する組立ラインから手術室で命を救うロボットまで, 高トルクステッパーは知られざるヒーローです. コルモーゲンのエンジニアが主張するように: 「ロボット工学では, トルクの精度はオプションではなく、動きそのものの言語なのです。」
ロボット工学に最適化されたシリーズを探索する:
- ありません 17/23 高トルクハイブリッド: 40% より多くのトルク, 過酷な環境向けの IP65 定格.
- 閉ループサーボステッパー: 17-ビットエンコーダ + ゼロコギングアルゴリズム.
次の設計のための 3D モデルまたはトルク-速度曲線をリクエストしてください.
グリーンスカイパワー株式会社, 株式会社. 研究に従事する専門メーカーです, 発達, 製造, 高トルクステッピングモーターの販売.
高トルクを求めるなら ステッピングモーター ロボットプロジェクト用, 営業チームにお問い合わせください.

