

Alimenter la robotique: Motors pas passibles de stepper à torque pour applications robotiques
La robotique ne se limite plus aux fantasmes de science-fiction - c'est des usines de remodelage, hôpitaux, et la vie quotidienne. Au cœur de cette révolution mentemoteurs pas à pas à torque élevé, conçu pour fournir une précision, fiabilité, et la densité de puissance où les actionneurs traditionnels échouent. Cet article explore comment ces moteurs surmontent les défis uniques de la robotique et mettent en évidence les solutions de pointe pour les concepteurs.
Pourquoi les steppers à torque élevé dominent la robotique
Demande de systèmes robotiques:
- Positionnement de précision (par ex., chirurgical des robots nécessitant une précision de ± 0,05 mm)
- Rapports de couple / inertie élevésPour les départs / arrêts rapides
- DurabilitéDans des environnements difficiles (poussière, humidité, Swings de température)
Moteurs passants hybrides Excel ici, combiner les aimants permanents et les rotors dentés pour offrir une résolution angulaire exceptionnelle et une consistance de couple - critique pour les tâches répétitives comme le broyage CNC ou le soudage de la ligne d'assemblage.
Top High-Torque Stepper Technologies pour la robotique
Basé sur les innovations des fabricants de premier plan:
1. Série Powerplus de Moons
- Plage de couple: 0.7–35 nm (NEMA 23–34 cadres)
- Innovation clé: 25–40% de couple plus élevé vs. normes, Idéal pour les imprimantes 3D et les robots médicaux.
- Robotique ajusté: Optimisé pour les charges utiles dynamiques dans les véhicules guidés automatisés (AGV).
2. Série T Kollmorgen
- Densité de couple: De pointe, avec des algorithmes de résonance.
- Applications: Robots collaboratifs (couvrer) et précision Armes Besoin mouvement fluide.
3. Moteurs classés JVL IP67
- Design robuste: Résiste aux lavages dans les robots de transformation des aliments.
- Plage de couple: 0.01–50 nm (Non 08–53), permettant des conceptions conjointes compactes dans les bras articulés.
4. Moteurs de micro-pacifique scientifique
- Résolution: 200 étapes / rev + rétroaction de l'encodeur pour la précision en boucle fermée.
- Cas d'utilisation: Robots chirurgicaux nécessitant 12 Couple nm et 2,500 RPM.
Tableau: Comparaison du moteur pas à pas à torque élevé
| Série | Plage de couple | Caractéristique clé | Mieux pour |
|---|---|---|---|
| Powerpllus de lunes | 0.7–35 nm | 40% Efficacité de couple plus élevée | AGV, 3Imprimantes D |
| Série T Kollmorgen | Coutume | Contrôle anti-résonance | Couvrer, armes de précision |
| JVL Compact | 0.01–50 nm | Protection IP67 | Aliments / robots médicaux |
| Pacifique scientifique | Jusqu'à 12 Nm | 0.035 kg · m² inertie | Robotique chirurgicale / imagerie |
Applications de robotique critiques

1. Automatisation industrielle
- Défi: Levage répétitif (par ex., 20Télédiums kg) sans dérive de position.
- Solution: IL N'Y A PAS 42 moteurs (par ex., Anaheim Automation 5,700 Modèles Oz-in) avec deux arbres pour le fractionnement du couple.
2. Robotique médicale
- Exigence: Précision inférieure au millimètre dans les pompes à seringue ou les bras chirurgicaux.
- Technicien: Hybrides en boucle fermée avec microsteping 256x (par ex., Wantai 20by) pour un mouvement sans tremblement.
3. Mobile & Robots de service
- Besoin: Efficacité énergétique dans les robots alimentés par batterie (par ex., Robots de nettoyage).
- Innovation: Régénération entraîne la conversion d'énergie cinétique en recharge de batterie.
4-Guide de sélection de pas pour les concepteurs robotiques
- Profil de vitesse de couple
- Calculer le pic / couple continu au régime opérationnel (par ex., 15 Couple de maintien NM pour les soudeurs robotiques).
- Note environnementale
- Prioriser IP54 + (poussière / humidité) pour les robots extérieurs ou IP67 pour les zones de lavage.
- Compatibilité de contrôle
- Assurer la prise en charge du pilote TMC2209 / TMC2225 pour la réduction du bruit Stealthchop ™.
- Certifications
- Valider mtbf >25,000 heures et ISO 9001 Fabrication pour la fiabilité du cycle de vie.
Comparaison technique entre les moteurs pas à pas et les servomoteurs à torque élevé dans les applications robotiques
1. Comparaison des métriques de performance de base
| Métrique | Moteurs pas à pas à torque élevé | Servomoteurs | Base technique |
|---|---|---|---|
| Caractéristiques du couple | Couple élevé à basse vitesse (par ex., 0.22–50 n · m), maisLe couple baisse de 40 à 60% >500 RPM | Cohérent couple à travers les vitesses (par ex., 0–3 000 tr / min à 12 N·m), 300% capacité de surcharge | Les steppers s'appuient sur la réticence magnétique; Les servos utilisent un contrôle orienté sur le terrain (FOC) |
| Précision de positionnement | Boucle ouverte: ± 0,9 ° (1.8° Angle de pas); ** boucle fermée: ± 0,05 ° ** | ** ± 0,01 ° ** (avec des encodeurs 17 bits) | Les servos corrigent les erreurs via des commentaires en temps réel; Les steppers s'appuient sur le comptage des impulsions |
| Réponse dynamique | 200–400 ms Accélération (0→ 100 tr / min) | <5 accélération MS (0→ 3 000 tr / min) | Servo en boucle fermée active les ajustements de la milliseconde |
| Efficacité énergétique | 40–60% (efficace à vitesses basse; Les pertes de cuivre dominent à des vitesses élevées) | 80–90% (Propulsé uniquement pendant le mouvement / la maintenance) | Les steppers tirent un courant constant; Les servos ajustent la puissance dynamiquement |
| Densité de couple | 20–30 n · m / kg (standard); jusqu'à 48 N · m / kg (par ex., Benyuan P1010) | 15–25 n · m / kg (jusqu'à35 N · m / kgAvec des aimants rare) | Les servos utilisent des aimants à haute résistance; Les steppers optimisent les enroulements |
2. Adéabilité spécifique à l'application
Robots industriels (par ex., Actionnement conjoint)
- Avantages passants:
Rentable pourprécision à basse vitesse (par ex., Vis de conduite dans les lignes de montage). Exemple: Wantai 20by réalise± 0,05 mm de répétabilitéÀ40% coût inférieurQue des servos équivalents. - Avantages servants:
Opération à grande vitesse (>1 MS) etRéponse de charge instantanée. Exemple: Kollmorgen T-Series s'adapte aux modifications de charge0.1sAvec 36 Couple de surcharge n · m.
Robots médicaux / chirurgicaux
- Limitations passantes:
Risques de vibration à basse vitesse affectant les tâches délicates (par ex., microchirurgie), nécessitant des amortisseurs supplémentaires. - SERVO ARIGIORITÉ:
Contrôle de vibration zéroAvec des encodeurs 17 bits Active0.001 précision mm (par ex., armes chirurgicales Da Vinci).
Robots mobiles (par ex., AGV, Quadrupèdes)
- Innovations de stepper:
Module P1010 de Benyuan (120 N · M Torque de pointe) Powers Robots quadrupèdes pour sauter en continu avec30% consommation d'énergie inférieureQue les servos. - Servo nécessité:
Compensation de couple instantanéePour l'adaptation du terrain (par ex., 20° l'escalade) Empêche la perte de pas.
3. Coût & Économie à vie
| Facteur de coût | Torque élevé Moteurs pas à pas | Servomoteurs |
|---|---|---|
| Coût initial | 80–150 (400Système W) | 350–500 (400Système W) |
| Coût énergétique | Haut (Trache de courant constant) | 30–50% inférieur (pouvoir adaptatif) |
| Coût de maintenance | Faible (Mécanique simple) | Plus haut (échec de l'encodeur >15% sur 5 années) |
| Période de retour sur investissement | <1 année (Projets à basse vitesse) | 2–3 ans (utilisation élevée) |
✅Règle de sélection: Steppers pourà basse vitesse, budgétaireProjets; servos pourgrande vitesse, 24/7 systèmes industriels.
4. Technologies hybrides & Cadre de sélection
Solutions hybrides
- Steppers en boucle fermée:
Encodeurs intégrés (par ex., Trinamique) Stimuler la précision à± 0,05 ° à 15% de coût inférieurQue les servos. - Servos intégrés:
Combos de moteur d'entraînement (par ex., B&R Acoposmotor) réduire la taille de40%.
Flux de travail de décision
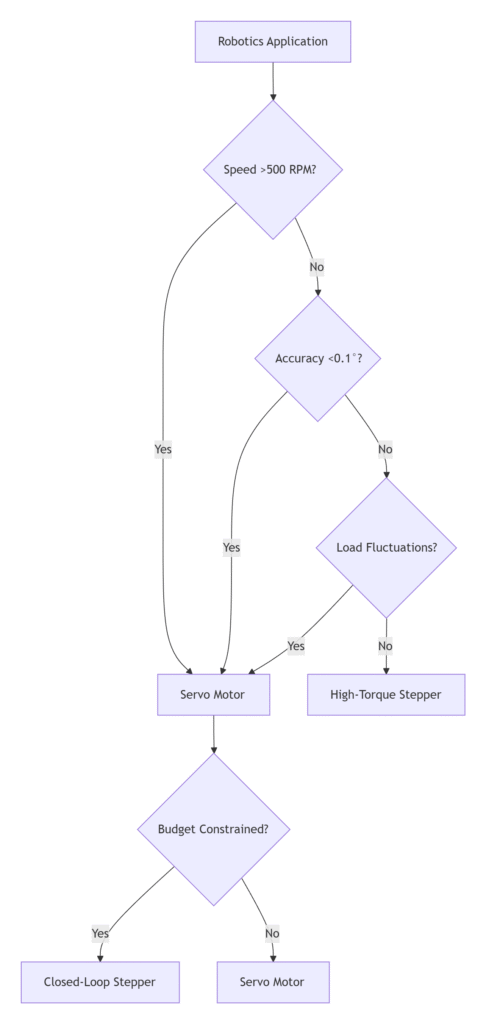
Les steppers à torque élevé excellentà basse vitesse, chargement statique, à des coûtsRobotique (par ex., 3D axes d'imprimante, AGV légers), tandis que les servos dominentgrande vitesse, dynamiqueApplications (par ex., robots chirurgicaux, armes industrielles). Convergence future de la boucle fermée steppers et servos compacts Blur les limites des performances - la sélection dépendbesoins opérationnels dynamiquesEtCoût total du cycle de vie.
Tendances futures: Actionne de la robotique de nouvelle génération
- Encodeurs intégrés: 17-Bit Absolute Encoders permettant une correction d'erreur en temps réel (<1µs latence).
- Contrôle basé sur l'IA: L'apprentissage automatique ajuste la sortie du couple de manière préventive, Faire couper les déchets d'énergie par 30%.
- Steppers piézoélectriques: Actionneurs en céramique sans friction pour les robots micro-chirurgicaux.
Conclusion: Couple comme moteur de l'innovation robotique
Des lignes de montage qui battent des cibles de production aux robots sauvant des vies dans les salles d'opération, Les steppers à torque élevé sont les héros non célébrés. Comme l'affirment les ingénieurs de Kollmorgen: «En robotique, La précision du couple n'est pas facultative - c'est le langage du mouvement lui-même. "
Explorez nos séries optimisées en robotique:
- IL N'Y A PAS 17/23 Hybrides à torque élevé: 40% plus de couple, IP65 coté pour les environnements durs.
- Servo-Steppers en boucle fermée: 17-Bit Encoders + algorithmes zéro-coging.
Demandez des modèles 3D ou des courbes de vitesse de couple pour votre prochain design.
Greensky Power Co., Ltd. est un fabricant professionnel engagé dans la recherche, développement, production, Vente de moteurs pas à pas de couple élevé.
Si vous recherchez un couple élevé moteurs pas à pas pour le projet de robotique, veuillez contacter notre équipe commerciale.

