
Sådan fungerer stepmotorer: En detaljeret vejledning
Stepmotorer er en type elektrisk motor, der omdanner elektriske impulser til præcise mekaniske bevægelser. De er meget udbredt i forskellige applikationer, der kræver høj præcision og nøjagtighed, såsom robotteknologi, CNC maskiner, og 3D-printere. Denne artikel vil dykke ned i den indre funktion af stepmotorer, udforske deres konstruktion, principper for drift, og de faktorer, der bidrager til deres præstationer.
Konstruktion af stepmotorer
Stepmotorer er sammensat af flere nøglekomponenter:
- Stator: Den stationære del af motoren, bestående af flere elektromagnetiske spoler, kendt som statorviklinger.
- Rotor: Den roterende del, normalt lavet af en lamineret jernkerne med tænder, der flugter med statorens magnetfelt.
- Aksel: Den centrale akse, der forbinder rotoren med belastningen.
- Lejer: Støt rotoren og reducer friktionen under rotation.
- Endedæksler: Beskyt de indvendige komponenter og hold dem på plads.
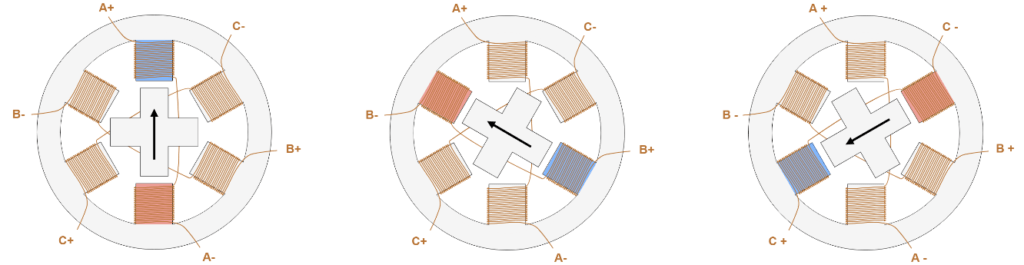
Principper for drift
Driften af en stepmotor er baseret på de grundlæggende principper for elektromagnetisme:
- Elektromagnetisk induktion: Når strømmen løber gennem statorviklingerne, det genererer et magnetfelt, der interagerer med rotorens magnetfelt.
- Magnetisk låsning: Rotoren justerer sig selv efter det magnetiske felt, der produceres af statoren, låses i position.
- Sekventiel aktivering: Ved sekventielt at aktivere forskellige statorviklinger, det motor kan styre magnetfeltets retning og størrelse, får rotoren til at rotere i præcise trin.
Kontrolmekanismer
Stepmotorer styres gennem en række elektriske signaler:
- Pulssignal: Hver impuls modtaget af motoren får den til at bevæge sig et trin.
- Retningskontrol: Rotationsretningen bestemmes af rækkefølgen, hvori statorviklingerne aktiveres.
- Hastighedskontrol: Motorens hastighed er direkte proportional med frekvensen af indgangsimpulserne.
Trinvinkel og opløsning
Trinvinklen er den vinkel, som motoren roterer med for hvert trin. Det bestemmes af udformningen af statoren og rotoren:
- Fuldt skridt: Den grundlæggende enhed for bevægelse, typisk 1.8 grader for en standard to-faset stepmotor.
- Microstepping: En teknik, der gør det muligt for motoren at tage mindre skridt end den fulde trinvinkel, forbedre glathed og opløsning.
Køretilstande
Stepmotorer kan drives i forskellige tilstande for at opnå forskellige ydelseskarakteristika:
- Full Step Mode: Hver statorfase aktiveres i rækkefølge, resulterer i den største trinvinkel.
- Halvtrinstilstand: Skifter mellem at aktivere en fase og at aktivere to faser, halvering af trinvinklen.
- Microstepping-tilstand: Modulerer strømmen i statorviklingerne for at skabe mellemtrin, giver større kontrol og jævnere bevægelse.
Inddelingskontrol
Underafdeling, eller mikrostepping, er en metode til at øge opløsningen af en stepmotor:
- Puls Underafdeling: Indgangsimpulsen er opdelt i mindre segmenter, tillader motoren at bevæge sig i mindre intervaller.
- Microstepping-drivere: Specialiserede regulatorer, der regulerer strømmen i statorviklingerne for at opnå finere trin.
Ansøgninger
Steppermotorer bruges i forskellige applikationer På grund af deres præcision og pålidelighed:





Fordele og begrænsninger
Stepmotorer har flere fordele, såsom:
- Høj præcision: Evnen til at styre position og bevægelse med stor nøjagtighed.
- Høj pålidelighed: Intet behov for et feedback-system, da motorens position i sagens natur er kendt.
- Lav vedligeholdelse: Få bevægelige dele reducerer sandsynligheden for mekanisk fejl.
Imidlertid, de har også nogle begrænsninger:
- Effektivitet: Kan være mindre effektive ved høje hastigheder på grund af arten af deres drift.
- Moment Ripple: Variationer i drejningsmomentydelsen, når motoren træder, hvilket kan påvirke problemfri drift.
Konklusion
Stepmotorer er en alsidig og pålidelig løsning til applikationer, der kræver præcis kontrol af bevægelse. Ved at forstå deres konstruktion, operation, og kontrolmekanismer, ingeniører kan effektivt udnytte kraften fra stepmotorer til at opfylde kravene i deres projekter. Efterhånden som teknologien udvikler sig, stepmotorernes ydeevne og egenskaber forbedres fortsat, åbner op for nye muligheder for deres anvendelse i forskellige brancher.
Sammenfattende, stepmotorer arbejde ved at konvertere elektriske impulser til mekaniske trin gennem en kombination af elektromagnetisk induktion, sekventiel aktivering, og præcise kontrolmekanismer. Deres evne til at give høj præcision og nøjagtighed gør dem uundværlige i mange moderne teknologier.
Greensky Power Co., Ltd. er en professionel producent, der beskæftiger sig med forskningen, udvikling, produktion, salg af stepmotor.
Hvis du søger Stepper Motor til dit projekt, kontakt venligst vores salgsteam.
