

Forstå stepmotor basics
Indledning
En steppermotor er en elektromagnetisk enhed, der konverterer elektriske pulssignaler til vinkel eller lineær forskydning. Denne type motor er meget almindelig inden for automatiseret kontrol på grund af dens nøjagtige kontrol og fordelen ved ikke at kræve et feedback -system. Denne artikel introducerer de grundlæggende koncepter, Arbejdsprincipper, Typer, og anvendelser af steppermotorer til begyndere.
Hvad er en steppermotor?
En trinmotor er en type digital kontrolmotor, der styrer motorens rotation gennem digitale signaler. Hver elektrisk puls får motoren til at rotere en fast vinkel, kendt som trinvinklen. Dette kendetegn ved stepmotorer Gør dem meget nyttige i situationer, der kræver præcis positionskontrol.
Arbejdsprincip for steppermotorer
Som alle motorer, Steppermotorer inkluderer også en fast del (stator) og en bevægende del (rotor). Statoren har en gearlignende fremspring med snoede spoler, Mens rotoren er en permanent magnet eller en variabel modvilje kerne. Vi vil se på de forskellige rotorstrukturer mere dybtgående senere. Figur 1 Viser et tværsnit af motoren med en variabel modvilje kerne rotor.
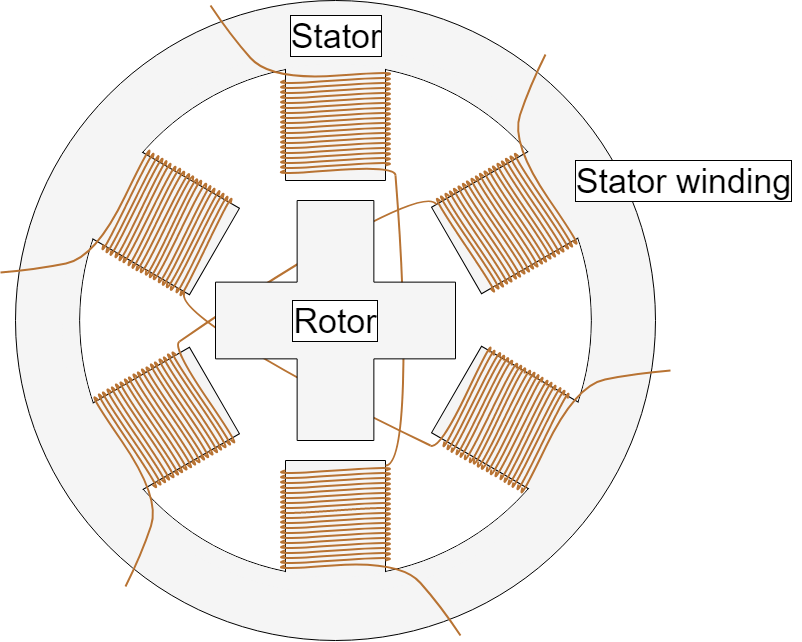
Det grundlæggende arbejdsprincip for steppermotoren er: Fasen af en eller flere statorer er energisk, Den nuværende, der passerer gennem spolen, genererer et magnetfelt, og rotoren vil være på linje med magnetfeltet; Anvendelse af spænding til forskellige faser igen, Rotoren roterer i en bestemt vinkel og når til sidst den ønskede position.
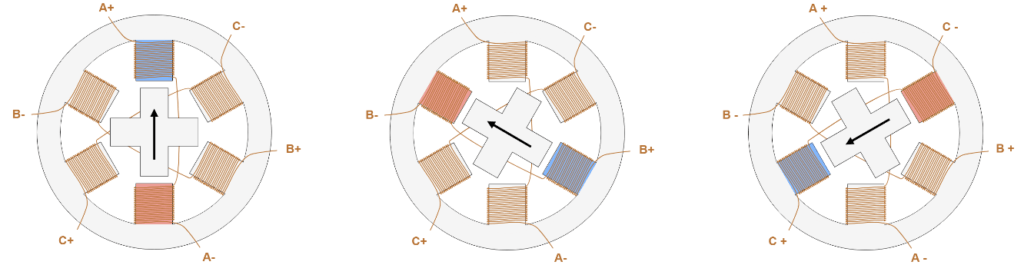
Figur 2 viser, hvordan dette fungerer. Først, Spole A er energisk og genererer et magnetfelt, som rotoren er på linje med; Efter spole B er energisk, Rotoren drejes 60 ° med uret for at tilpasse sig det nye magnetfelt; Den samme ting sker, når spole C er tændt. Farven på statortænderne i figuren nedenfor viser retningen af det magnetiske felt genereret af statorviklingerne.
Type og konstruktion af steppermotor
Ydelsen af steppermotoren (Uanset om det er opløsning/trin, hastighed eller drejningsmoment) påvirkes af detaljerne i konstruktionen, Og på samme tid, Disse detaljer kan også påvirke, hvordan motoren styres. Faktisk, Ikke alle steppermotorer har den samme interne struktur (eller konstruktion), Fordi forskellige motorer har forskellige rotor- og statorkonfigurationer.
Rotor
Stepper Motors har dybest set tre typer rotorer:
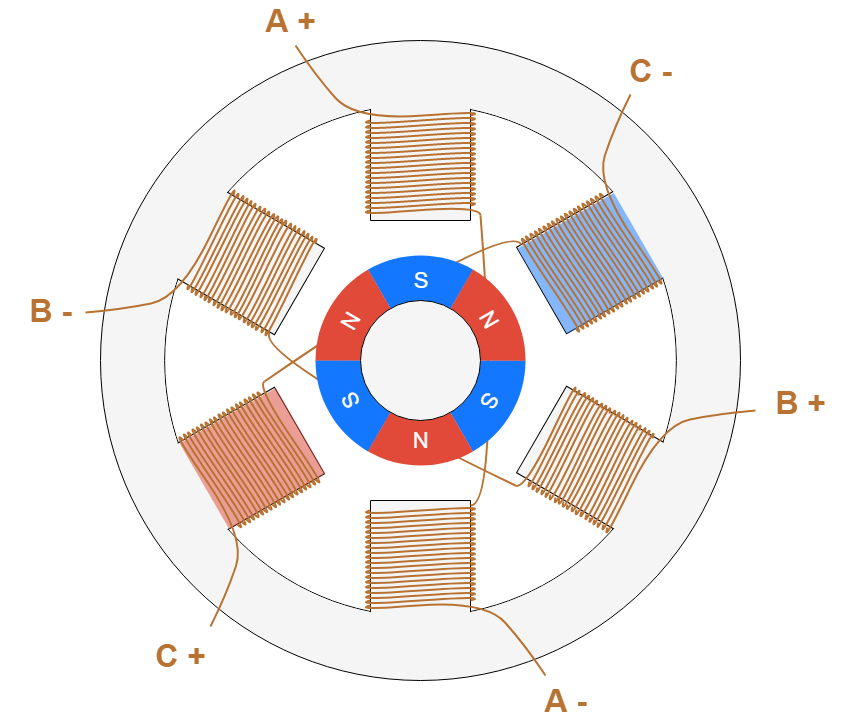
- Permanent magnetrotor: Rotoren er en permanent magnet, Justeret med det magnetiske felt genereret af statorkredsløbet. Denne rotor garanterer godt drejningsmoment og har bremsemoment. Dette betyder, at uanset om spolen er energisk eller ej, Motoren kan modstå (selvom ikke meget stærkt) ændringer i position. Imidlertid, sammenlignet med andre rotortyper, Dens ulempe er, at både hastighed og opløsning er lavere. Figur 3 Viser et tværsnit af en permanent magnet trinmotor.
- Variabel modvilje rotor: Rotoren er lavet af en jernkerne og har en særlig form, der kan tilpasses det magnetiske felt (Se tal 1 og 2). Denne rotor er lettere at opnå høje hastigheder og høj opløsning, Men det drejningsmoment, det producerer, er generelt lavere, og der er ikke noget bremsemoment.
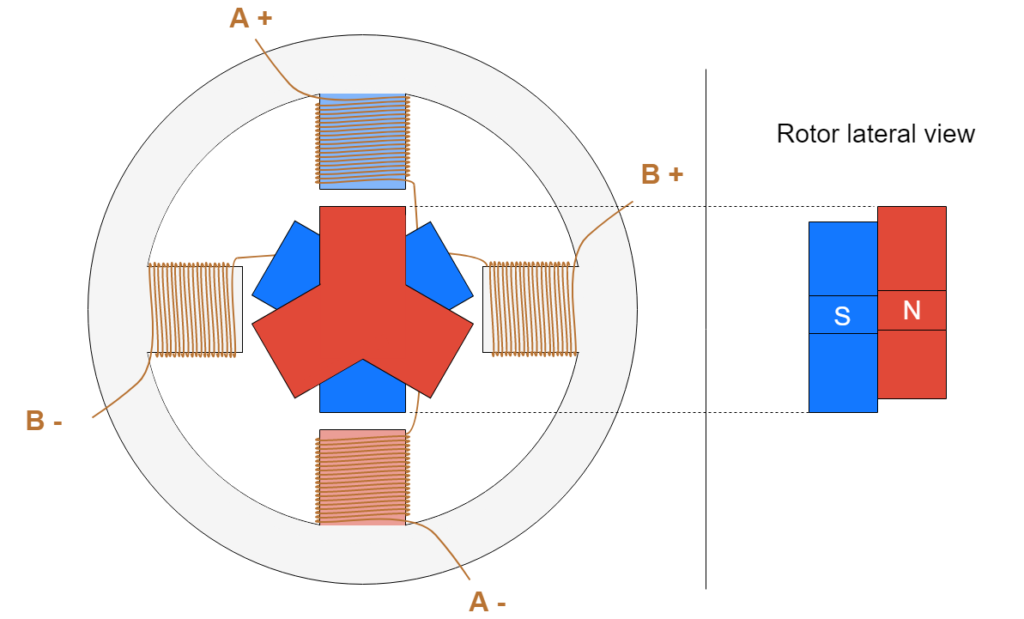
- Hybrid rotor: Denne rotor har en særlig struktur, Det er en hybrid af permanent magnet og variabel modvilje rotor. Der er to aksialt magnetiserede magnetiske hætter på rotoren, Og der er skiftende små tænder på de magnetiske hætter. Denne konfiguration giver motoren fordelene ved både permanent magnet og variabel modvilje rotor, Især med høj opløsning, høj hastighed og højt drejningsmoment. Selvfølgelig, Højere ydelseskrav betyder mere komplekse strukturer og højere omkostninger. Figur 3 viser et forenklet skematisk diagram over denne motoriske struktur. Når spole A er energisk, En lille tand af rotoren n magnetisk hætte er på linje med statortanden af magnetiseret s. På samme tid, På grund af rotorens struktur, Rotorens magnetiske hætte er på linje med statortænderne i magnetiseringen n. Skønt arbejdsprincippet for steppermotoren er det samme, Strukturen af den faktiske motor er mere kompleks, Og antallet af tænder er mere end det, der er vist på figuren. Et stort antal tænder giver motoren mulighed for at opnå en meget lille springvinkel, så lille som 0,9 °.
Stator
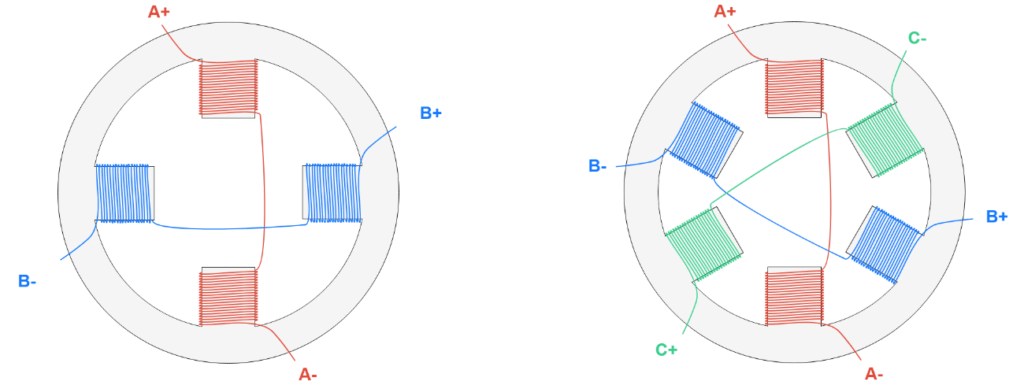
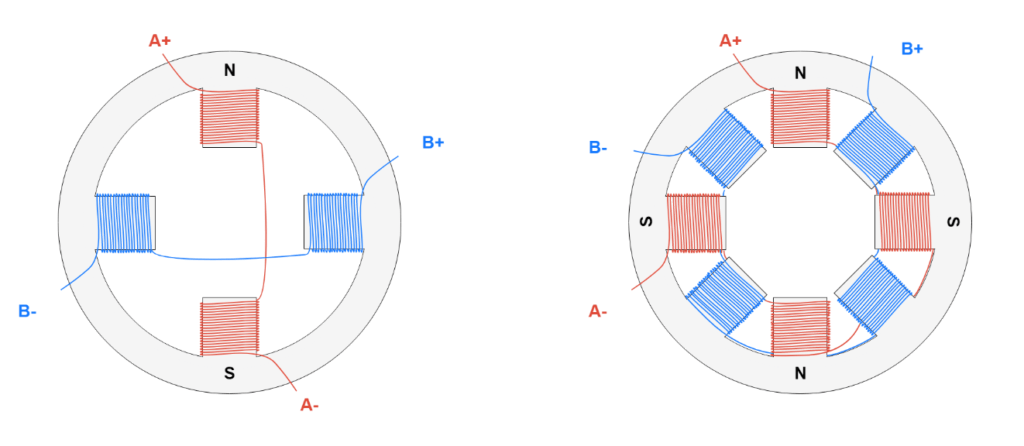
Statoren er den del af den motor, der er ansvarlig for at generere det magnetiske felt, som rotoren er på linje med. De vigtigste egenskaber ved statorkredsløbet er relateret til dets fasetal, polnummer og trådkonfiguration. Antallet af faser er antallet af uafhængige spoler, Og antallet af poler repræsenterer det vigtigste par af tænder, der er besat af hver fase. To-fase steppermotorer bruges oftest, mens trefasede og femfasede motorer er mindre almindeligt anvendt (Se tal 5 og 6).
Funktioner af steppermotorer
- Præcis kontrol: Trinmotorer kan nøjagtigt kontrollere vinkler og hastigheder.
- Intet behov for feedback: På grund af deres arbejdsprincip, stepmotorer kræver normalt ikke et positionsfeedback -system.
- Let at kontrollere: Trinmotorer kan kontrolleres gennem enkle pulssignaler.
- Højt drejningsmoment ved lave hastigheder: Ved lave hastigheder, Steppermotorer kan give et stort drejningsmoment.
Anvendelser af steppermotorer
Stepmotorer er vidt brugt på forskellige områder, inklusive men ikke begrænset til:
- Automatiseret maskineri: For præcis kontrol af mekaniske arme.
- Printere og scannere: At kontrollere bevægelsen af trykte hoveder og scanningshoveder.
- Robotik: Til kontrol af bevægelsen af robotfuger.
- Medicinsk udstyr: I nogle præcisionsmedicinske udstyr til at kontrollere den nøjagtige bevægelse af komponenter.
Sådan vælger du en steppermotor?
Når Valg af en steppermotor, Overvej følgende faktorer:
- Momentkrav: Vælg det relevante drejningsmoment baseret på applikationens belastning og hastighed.
- Trinvinkel: Jo mindre trinvinklen, jo højere opløsning af motoren, og den finere kontrol.
- Fart: Vælg et passende hastighedsområde baseret på applikationens behov.
- Størrelse og form: Vælg den relevante motoriske størrelse baseret på installationsrummet og designkrav.
Konklusion
Stepmotorer er alsidige og egnede til applikationer, der kræver præcis kontrol. Gennem denne introduktion, Begyndere skal have en grundlæggende forståelse af trinmotorer og være i stand til at begynde at udforske deres potentiale i forskellige applikationer. Med kontinuerlig udvikling af teknologi, Anvendelsesområdet for steppermotorer udvides også konstant, giver stærk støtte til moderne automatisering og præcisionskontrol.
Greensky Power Co., Ltd. er en professionel producent, der beskæftiger sig med forskningen, udvikling, produktion, salg af stepmotor.
Hvis du søger Stepper Motor til dit projekt, kontakt venligst vores salgsteam.

