

Hvad er 5 typer styremotorer?
Som vi alle ved, motor er en vigtig del af driv- og kontrolsystemet. Med udviklingen af moderne videnskab og teknologi, motorens fokus i praktisk anvendelse er begyndt at skifte fra simpel kørsel til kompleks styring; Især den nøjagtige kontrol af hastigheden, motorens position og drejningsmoment. Imidlertid, motorer har forskellige design og køretilstande i henhold til forskellige applikationer.
Ved første øjekast, det ser ud til, at typevalget er meget komplekst. Derfor, for mennesker, den grundlæggende klassificering er lavet efter formålet med roterende motorer. Næste, vi laver en “folketælling” til den store motorfamilie, og gradvist introducere den mest repræsentative, mest almindeligt anvendte og grundlæggende motor i motoren – styre motor.
Styremotor
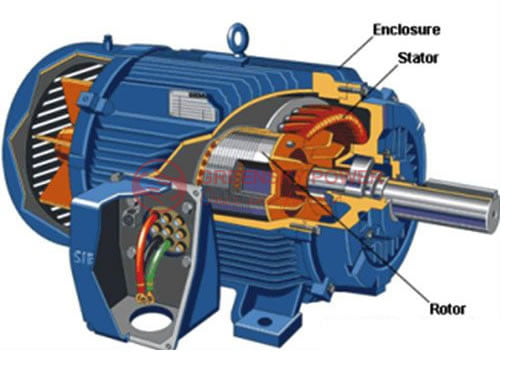
Styremotoren bruges hovedsageligt til nøjagtig hastigheds- og positionskontrol, og bruges som en “aktuator” i styresystemet. Den kan opdeles i servomotor, stepmotor, momentmotor, skiftet reluktansmotor, DC børsteløs motor, etc.

1. Servo motor
Servo motorer er meget udbredt i forskellige kontrolsystemer. De kan konvertere indgangsspændingssignalet til det mekaniske output på motorakslen og trække de kontrollerede komponenter for at opnå kontrolformålet. Generelt, servomotoren kræver, at motorens hastighed styres af det påtrykte spændingssignal; Omdrejningshastigheden kan løbende ændres med ændringen af det påførte spændingssignal; Drejningsmomentet kan styres af strømmen fra controlleren; Motoren skal have hurtig respons, lille volumen og lille kontrolkraft. Servomotorer bruges hovedsageligt i forskellige bevægelseskontrolsystemer, især servosystemer.
Der er DC og AC servomotorer. Den tidligste servomotor er en generel jævnstrømsmotor. I tilfælde af lav kontrolnøjagtighed, den generelle DC-motor bruges som servomotor. På nuværende tidspunkt, med den hurtige udvikling af permanent magnet synkronmotorteknologi, de fleste servomotorer refererer til AC permanent magnet synkrone servomotorer eller DC børsteløse motorer.

2. Stepmotor
Den såkaldte stepmotor er en aktuator, der omdanner elektrisk puls til vinkelforskydning; Mere generelt, når stepdriveren modtager et pulssignal, den driver stepmotoren til at rotere en fast vinkel i den indstillede retning. Vi kan kontrollere vinkelforskydningen af motoren ved at kontrollere antallet af impulser for at opnå formålet med nøjagtig positionering; På samme tid, motorens hastighed og acceleration kan styres ved at styre pulsfrekvensen for at opnå formålet med hastighedsregulering. På nuværende tidspunkt, de almindeligt anvendte stepmotorer omfatter reaktive stepmotorer (VR), permanent magnet trinmotorer (PM), hybrid trinmotorer (HB) og enfasede stepmotorer.
Forskellen mellem stepmotor og almindelig motor er hovedsageligt formen for pulsdrev. Det er netop denne egenskab, at stepmotoren kan kombineres med moderne digital styringsteknologi. Imidlertid, stepmotoren er ikke så god som den traditionelle lukkede kredsløbskontrol DC servomotor med hensyn til kontrolnøjagtighed, hastighedsvariationsområde og lav hastighedsydelse;

Derfor, det bruges hovedsageligt i situationer, hvor nøjagtighedskravet ikke er særligt højt. På grund af dens enkle struktur, høj pålidelighed og lave omkostninger, trinmotorer er meget udbredt i forskellige områder af produktionspraksis; Især inden for NC-fremstilling af værktøjsmaskiner, fordi stepmotoren ikke behøver A/D-konvertering og direkte kan konvertere det digitale pulssignal til vinkelforskydning, det er blevet betragtet som den mest ideelle executive komponent i NC-værktøjsmaskiner.
Ud over anvendelsen i CNC-værktøjsmaskiner, stepmotorer kan også bruges i andre maskiner, såsom motorerne i foderautomater, motorerne i almindelighed diskettedrev, og også i printere og plottere.
Ud over, stepmotoren har også mange defekter; På grund af den ubelastede startfrekvens af stepmotoren, stepmotoren kan køre normalt ved lav hastighed, men den kan ikke startes, hvis hastigheden er højere end en bestemt hastighed, ledsaget af et skarpt hvin; Præcisionen af opdelingsdrev fra forskellige producenter kan variere meget, og jo større underinddeling, jo sværere er det at kontrollere præcisionen; i øvrigt, stepmotoren har store vibrationer og støj, når den roterer med lav hastighed.

3. Moment motor
Den såkaldte momentmotor er en flad flerpolet permanentmagnet DC-motor. Armaturet har flere slots, kommuteringsstykker og serieledere for at reducere drejningsmomentrippel og hastighedsrippel. Der er to slags momentmotorer: DC momentmotor og AC momentmotor.
Blandt dem, den selvinducerede reaktans af DC-momentmotoren er meget lille, så dens respons er meget god; Dens udgangsmoment er proportional med indgangsstrømmen og uafhængig af rotorens hastighed og position; Den kan forbindes direkte med belastningen og køre ved lav hastighed uden gearreduktion under tilstanden tæt på låst rotor, så det kan producere et højt drejningsmoment til inerti-forhold på belastningsakslen og eliminere systemfejlen forårsaget af brugen af reduktionsgear.

AC momentmotor kan opdeles i synkron og asynkron. På nuværende tidspunkt, egern-bur asynkron drejningsmomentmotor er almindeligt anvendt, som har egenskaberne ved lav hastighed og stort drejningsmoment. Generelt, AC momentmotorer bruges ofte i tekstilindustrien. Deres arbejdsprincip og struktur er den samme som enfasede asynkronmotorer. Imidlertid, på grund af den store modstand fra egernburrotoren, dens mekaniske egenskaber er relativt bløde.

4. Skiftet reluktansmotor
Skiftet reluktansmotor (SRM) er en ny type hastighedsreguleringsmotor med ekstrem enkel og solid struktur, lave omkostninger og fremragende hastighedsreguleringsydelse. Det er en stærk konkurrent til traditionel kontrolmotor og har et stærkt markedspotentiale. Men pt, der er også problemer som drejningsmoment, løbestøj og store vibrationer, som har brug for lidt tid til at optimere og forbedre for at tilpasse sig den faktiske markedsapplikation.
5. Børsteløs DC motor
Børsteløs DC motor (BLDCM) er udviklet på basis af børsteløs jævnstrømsmotor, men dens drivende strøm er AC til punkt og prikke; Børsteløs jævnstrømsmotor kan opdeles i børsteløs hastighedsmotor og børsteløs drejningsmomentmotor. Generelt, der er to slags drivstrøm for børsteløs motor, den ene er trapezformet bølge (generelt “firkantet bølge”), og den anden er sinusbølge. Nogle gange kaldes førstnævnte DC børsteløs motor, og sidstnævnte kaldes AC servomotor, som netop er en af AC servomotorer.
For at reducere inertimomentet, den børsteløse jævnstrømsmotor anvender normalt en “slank” struktur. Den børsteløse DC-motor er meget mindre i vægt og volumen end den børsteløse DC-motor, og det tilsvarende inertimoment kan reduceres med ca 40-50%. På grund af bearbejdningsproblemet med permanentmagnetmaterialer, den generelle kapacitet af børsteløs jævnstrømsmotor er under 100kW.
Denne type motor har god linearitet af mekaniske egenskaber og reguleringskarakteristika, bredt hastighedsområde, lang levetid, praktisk vedligeholdelse og lav støj, og har ikke en række problemer forårsaget af elektrisk børste, så det har et stort anvendelsespotentiale i kontrolsystemet.
Greensky Power Co., Ltd. er en professionel producent, der beskæftiger sig med forskningen, udvikling, produktion, salg af styremotorer.
Hvis du søger kontrolmotor til dit projekt, kontakt venligst vores salgsteam.

