

動力機器人技術: 適用於機器人應用的高扭矩步進電機
機器人技術不再局限於科幻幻想——它正在重塑工廠, 醫院, 和日常生活. 這場革命的核心在於高扭力步進電機, 旨在提供精確度, 可靠性, 和傳統執行器不足的功率密度. 本文探討了這些馬達如何克服機器人技術的獨特挑戰,並為設計師重點介紹了尖端解決方案.
號為什麼高扭矩步進機在機器人領域佔據主導地位號
機器人系統需求:
- 號精準定位號 (例如, 外科 機器人 要求±0.05mm精度)
- 號高扭矩慣量比用於快速啟動/停止
- 號耐用性在惡劣環境下 (灰塵, 水分, 溫度波動)
混合步進電動機 在這裡表現出色, 結合永久磁鐵和齒形轉子,提供卓越的角度分辨率和扭矩一致性,對於數控銑削或裝配線焊接等重複性任務至關重要.
號頂級機器人高扭力步進技術號
基於領先製造商的創新:
號1. MOONS’ PowerPlus 系列號
- 號扭力範圍: 0.7–35 牛頓米 (NEMA 23–34 框架)
- 號關鍵創新: 25– 扭力比之前高出 40%. 標準, 3D 列印機和醫療機器人的理想選擇.
- 號機器人健身: 針對自動導引車的動態有效負載進行了最佳化 (AGV).
號2. 科爾摩根 T 系列號
- 號扭矩密度: 產業領先, 具有共振阻尼演算法.
- 號應用領域: 協作機器人 (協作機器人) 和精度 需要武器 平滑運動.
號3. JVL IP67 級電機號
- 號堅固耐用的設計: 可承受食品加工機器人的沖洗.
- 號扭力範圍: 0.01–50 牛米 (NEMA 08–53), 實現關節臂的緊湊關節設計.
號4. 太平洋科學微步進電機號
- 號解決: 200 步數/轉 + 編碼器回饋確保閉環精度.
- 號使用案例: 手術機器人需要 12 牛頓米扭力和 2,500 轉速.
桌子: 高扭力步進馬達比較
| 號系列號 | 號扭力範圍號 | 號關鍵功能號 | 號最好的號 |
|---|---|---|---|
| MOONS 的 PowerPlus | 0.7–35 牛頓米 | 40% 更高的扭力效率 | AGV, 3數位印表機 |
| 科爾摩根 T 系列 | 風俗 | 抗共振控制 | 協作機器人, 精密武器 |
| JVL緊湊型 | 0.01–50 牛米 | IP67防護等級 | 食品/醫療機器人 |
| 太平洋科學 | 取決於 12 牛米 | 0.035 kg·m² 慣量 | 手術/影像機器人 |
號關鍵機器人應用
 號
號
號1. 工業自動化號
- 號挑戰: 重複舉升 (例如, 20公斤有效載重) 無位置漂移.
- 號解決方案: 沒有 42 電機 (例如, 阿納海姆自動化公司 5,700 盎司英吋型號) 帶雙軸扭力分配.
號
2. 醫學機器人技術號
- 號要求: 注射幫浦或手術臂的亞毫米精度.
- 號馬達技術: 具有 256 倍微步進的閉環混合動力 (例如, 萬泰20BY) 實現無震顫運動.
號
3. 移動的 & 服務機器人號
- 號需要: 電池供電機器人的能源效率 (例如, 清潔機器人).
- 號創新: 再生驅動器將動能轉化為電池充電.
號4-機器人設計師的步驟選擇指南號
- 號扭力-速度曲線號
- 計算峰值/連續扭矩 在運轉轉速下 (例如, 15 機器人焊接機的保持扭力 Nm).
- 號環境評級號
- 優先考慮IP54+ (灰塵/濕氣) 適用於戶外機器人或 IP67 適用於沖洗區域.
- 號控制相容性號
- 確保 TMC2209/TMC2225 驅動程式支援 StealthChop™ 降噪.
- 號認證證書號
- 驗證平均無故障時間 >25,000 小時和 ISO 9001 生命週期可靠性製造.
高扭矩步進馬達與伺服馬達在機器人應用中的技術比較
號1. 核心效能指標比較號
| 號公制號 | 號高扭力步進電機號 | 號伺服電機號 | 號技術基礎號 |
|---|---|---|---|
| 號扭力特性號 | 低速高扭矩 (例如, 0.22–50 牛頓米), 但是扭力下降 40–60% >500 轉速號 | 持續的 不同速度下的扭矩 (例如, 0–3,000 轉/分鐘 12 牛頓·米), 號300% 過載能力號 | 步進器依靠磁阻; 伺服系統使用磁場定向控制 (FOC) |
| 號定位精度號 | 開環: ±0.9° (1.8°步角); **閉環: ±0.05°** | **±0.01°** (附 17 位元編碼器) | 伺服系統透過即時回饋修正錯誤; 步進器依靠脈衝計數 |
| 號動態響應號 | 200–400 毫秒加速 (0→100轉/分鐘) | 號號<5 毫秒加速度號 (0→3,000轉/分鐘) | 伺服閉環實現毫秒調整 |
| 號功率效率號 | 40–60% (高效於 低速; 高速時銅損占主導地位) | 號80–90%號 (僅在運動/保持期間供電) | 步進器消耗恆定電流; 舵機動態調整功率 |
| 號扭矩密度號 | 20–30牛頓米/公斤 (標準); 號最多 48 n·m/kg號 (例如, 本源P1010) | 15–25牛頓米/公斤 (到35 n·m/kg使用稀土磁鐵) | 舵機使用高強度磁鐵; 步進器優化繞組 |
2. 特定應用的適用性號
號工業機器人 (例如, 聯合驅動)號號
- 號步進機優點:
具有成本效益低速精度號 (例如, 裝配線上的螺絲驅動). 例子: 萬泰20BY實現±0.05 mm 重複性於40% 成本更低比同等伺服系統. - 號伺服優勢:
號高速運轉號 (>1 多發性硬化症) 和瞬時負載響應. 例子: 科爾摩根 T 系列可根據負載變化進行調整0.1s與 36 N·m 過載扭矩.
號醫療/手術機器人號
- 號步進器的限制:
低速振動有影響精細任務的風險 (例如, 顯微外科), 需要額外的阻尼器. - 號伺服優勢:
號零振動控制配備 17 位元編碼器0.001 毫米精確度號 (例如, 達文西手術臂).
號移動機器人 (例如, AGV, 四足動物)號號
- 號步進創新:
本源P1010模組 (120 峰值扭力N·m) 為四足機器人提供連續跳躍的動力30% 降低能源消耗比伺服系統. - 號伺服必要性:
號即時扭力補償用於地形適應 (例如, 20° 傾斜攀登) 防止失步.
3. 成本 & 終身經濟學號
| 號成本因素號 | 號高扭力 步進馬達號 | 號伺服電機號 |
|---|---|---|
| 號初始成本號 | 80–150 (400W系統) | 350–500 (400W系統) |
| 號能源成本號 | 高的 (恆定電流消耗) | 號30–50% 降低號 (自適應功率) |
| 號維護成本號 | 低的 (簡單的機制) | 更高 (編碼器故障 >15% 超過 5 年) |
| 號ROI期號 | 號號<1 年號 (低速項目) | 2–3 年 (高利用率) |
✅選擇規則: 踏步機低速, 預算敏感的專案; 伺服系統高速, 24/7 工業系統號.
4. 混合技術 & 選擇框架號
號混合解決方案號
- 號閉環步進器:
整合編碼器 (例如, 特里納克) 提高準確度±0.05°,成本降低 15%比伺服系統. - 號整合伺服系統:
驅動馬達組合 (例如, 乙&R ACOPOS電機) 減小尺寸40%號號.
號決策工作流程號
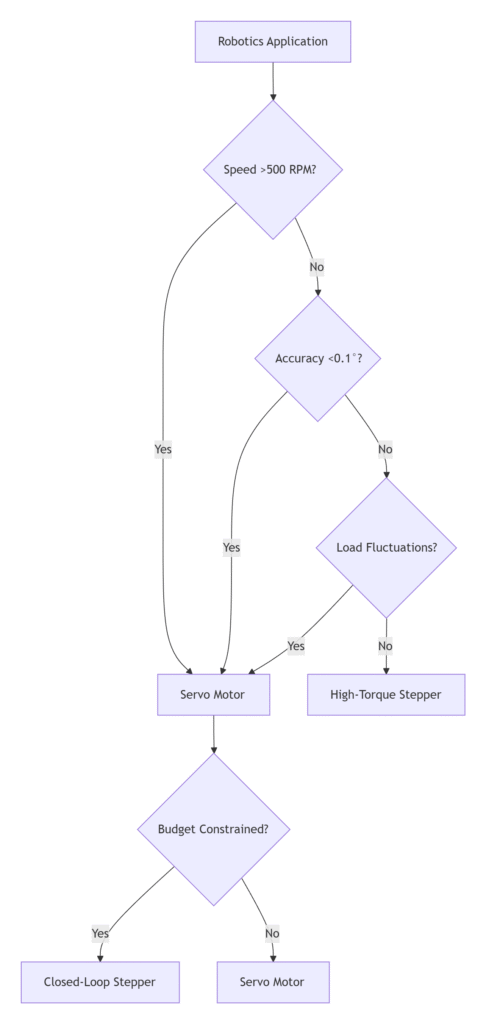
高扭矩步進機擅長於低速, 靜載重, 成本驅動機器人技術 (例如, 3D 印表機軸, 輕量AGV), 而伺服系統占主導地位高速, 動態負載應用 (例如, 手術機器人, 工業武器). 未來融合閉環 步進器和緊湊型伺服系統 將模糊性能界限——選擇取決於動態營運需求和總生命週期成本號.
號未來趨勢: 下一代機器人驅動號
- 號整合編碼器: 17-位元絕對編碼器可實現即時糾錯 (<1微秒延遲).
- 號人工智慧驅動控制: 機器學習預先調整扭力輸出, 減少能源浪費 30%.
- 號壓電步進器: 用於微型手術機器人的無摩擦陶瓷執行器.
號結論: 扭矩作為機器人創新的引擎號
從完成生產目標的裝配線到在手術室挽救生命的機器人, 高扭力步進機是不知名的英雄. 正如科爾摩根的工程師所說: 「在機器人技術領域, 扭矩精度不是可選的——它是運動本身的語言。 」
號探索我們的機器人最佳化系列:
- 號沒有 17/23 高扭力混合動力: 40% 更多扭矩, IP65 等級,適用於惡劣環境.
- 號閉環伺服步進機: 17-位編碼器 + 零齒槽演算法.
為您的下一個設計請求 3D 模型或扭矩-速度曲線.
綠天電力公司, 有限公司. 是一家從事研究的專業製造商, 發展, 生產, 銷售高扭力步進電機.
如果您正在尋找高扭矩 步進電機 用於機器人專案, 請聯繫我們的銷售團隊.

