ฉันจะเลือกตัวลดเกียร์ได้อย่างไร?8 ควรสังเกตคะแนน!
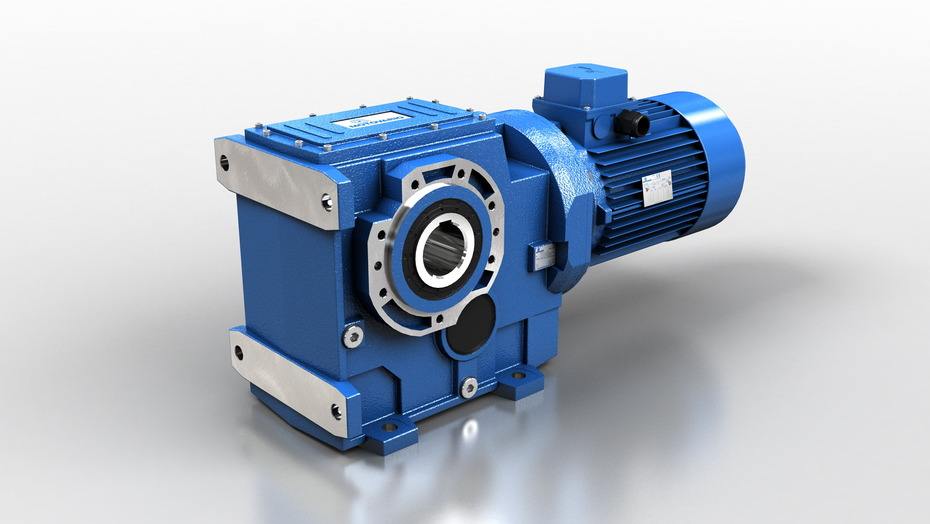
ตัวลดเกียร์ เป็นส่วนสำคัญของระบบการส่งพลังงานเชิงกล, ใช้สำหรับการแปลงความเร็วและแรงบิด. การเลือกอันที่เหมาะสมสำหรับแอปพลิเคชันเป็นกระบวนการที่ค่อนข้างตรงไปตรงมา. มีตัวลดเกียร์หลายประเภท, พารามิเตอร์ทางเทคนิคที่แตกต่างกันของ ตัวลดเกียร์, ลักษณะประสิทธิภาพก็แตกต่างกัน, ในการเลือกตัวลดจำเป็นต้องพิจารณาอัตราส่วนการลดลง, แรงบิดเอาท์พุต, กำลังมอเตอร์, แรงดันไฟฟ้า, การกวาดล้างกลับ, ความเร็วเอาต์พุต, ขับมอเตอร์, โครงสร้างกล่องเกียร์ลดลงและพารามิเตอร์อื่น ๆ.
ฉันจะเลือกตัวลดเกียร์ได้อย่างไร?8 ควรสังเกตคะแนน!
1. อัตราส่วนการลด. อัตราส่วนการลดลงเป็นพารามิเตอร์ที่สำคัญกว่าในกระบวนการเลือกของตัวลด, เขากำหนดความเร็วในการส่งออกมอเตอร์และความเร็วเอาท์พุทของเวลาการชะลอตัวลดลง, หากคุณต้องการลดความเร็วของหนึ่งในห้าหรือหนึ่งในสิบของคอลัมน์, คุณสามารถเลือกตามอัตราส่วนการลดลง.
2. แรงบิดเอาต์พุต. นี่คือพารามิเตอร์ที่กำหนดตามความต้องการโหลดอุปกรณ์, การใช้การแปลงระหว่างสูตรเพื่อคำนวณค่าอุปสงค์ของแรงบิดนี้โดยเฉพาะเท่าใด. สูตรการคำนวณแรงบิดลดลง: แรงบิดลดลง = 9550 อัตราส่วนพลังงานมอเตอร์÷อัตราส่วนความเร็วรอบความเร็วมอเตอร์ * ใช้ปัจจัย.
3. กำลังมอเตอร์. นี่คือพารามิเตอร์ที่เกี่ยวข้องสำหรับการจัดหาด้านพลังงาน. หากคุณไม่ทราบว่ามอเตอร์ต้องการพลังงานเท่าใดคุณสามารถส่งพารามิเตอร์สองตัวข้างต้นไปยังเจ้าหน้าที่ด้านเทคนิคสำหรับการเลือกของคุณ, คุณสามารถหาขนาดพลังงานของมอเตอร์ได้ตามอัตราส่วนการลดลงของตัวลดและแรงบิดเอาท์พุท.
4. แรงดันไฟฟ้าทำงาน. แรงดันไฟฟ้าที่ทำงานของตัวลดขนาดเล็กมักจะอยู่ระหว่าง 3V-24V, ตัวลดขนาดเล็กชนิดนี้, ข้อมูลจำเพาะเส้นผ่านศูนย์กลางภายใน 38 มม., มักใช้กันอย่างแพร่หลายในอุปกรณ์อิเล็กทรอนิกส์ยานยนต์, อุปกรณ์สื่อสาร, บ้านอัจฉริยะ, หุ่นยนต์ไดรฟ์, เป็นต้น; พลังการทำงานของตัวลดขนาดใหญ่สามารถมากกว่า 95kW, แรงบิดที่ลดลงขนาดใหญ่แบบนี้, การชะลอตัวที่หลากหลาย, ปริมาณมาก, ใช้กันอย่างแพร่หลายในการยก, การก่อสร้าง, ท่าเรือ, เหมืองแร่, เหล็กกล้าอุตสาหกรรมหนักและทุ่งอุตสาหกรรมหนักอื่น ๆ.
5. การกวาดล้างกลับ. เมื่อปลายเอาต์พุตได้รับการแก้ไขและปลายอินพุตหมุนตามเข็มนาฬิกาและทวนเข็มนาฬิกาเพื่อสร้างแรงบิดที่จัดอันดับ +-2% แรงบิด, มีการกระจัดเชิงมุมขนาดเล็กที่ปลายอินพุตของตัวลด, และการกระจัดเชิงมุมนี้คือการกวาดล้างการส่งคืน. หน่วยคือ “นาที”, ซึ่งเป็นหนึ่งในสิบหกของหนึ่งองศา. มันเรียกอีกอย่างว่าแบ็คแลช. กลไกที่ใช้ตัวแปลงความเร็วของเกียร์เพื่อชะลอจำนวนการปฏิวัติของมอเตอร์ (เครื่องยนต์) ตามจำนวนการปฏิวัติที่ต้องการและเพื่อให้ได้แรงบิดที่ใหญ่ขึ้น. ในกลไกตัวลดที่ใช้ในการส่งพลังงานและการเคลื่อนไหว, ตัวลดประเภทความแม่นยำ, อัตราส่วนการลดลงสามารถถูกต้องได้ 0.1 รอบต่อนาที – 0.5 รอบต่อนาที.
6. ความเร็วเอาต์พุต. ในการใช้ Reducer มักจะสัมผัสผู้ใช้บางคนที่มีข้อกำหนดสำหรับความเร็ว, เช่นข้อกำหนดสำหรับผลลัพธ์ของ 32 RPM หรือ 0.65 รอบต่อนาที, ข้อกำหนดประเภทยากเหล่านี้ในการเลือกสิ่งที่ดีที่สุดหรือเพื่อให้การเลือกบุคลากรด้านเทคนิค.
7. ประเภทของมอเตอร์ไดรฟ์. สภาพแวดล้อมการใช้งานที่แตกต่างกันสำหรับความต้องการของมอเตอร์นั้นแตกต่างกัน, บางคนจะต้องพิสูจน์การระเบิด, บางอย่างจะต้องควบคุมความถี่, บางส่วนเป็นเบรก, บางคนจะอยู่ในตำแหน่งที่ถูกต้อง; ตัวลดมอเตอร์ไดรฟ์ที่ใช้กันทั่วไปคือมอเตอร์ DC, มอเตอร์แปรง, มอเตอร์ไร้แปรงถ่าน, สเต็ปเปอร์มอเตอร์, มอเตอร์ถ้วยกลวง, เซอร์โวมอเตอร์, เป็นต้น.
8. โครงสร้างกล่องเกียร์ลดลง. เมื่อเลือกตัวลด, พิจารณาประเภทของโครงสร้างกล่องเกียร์, ประเภทโครงสร้างแตกต่างกัน, พารามิเตอร์ทางเทคนิคก็แตกต่างกัน; การลดโครงสร้างเกียร์โครงสร้างประเภทไดรฟ์ที่ใช้กันทั่วไปคือกระปุกเกียร์ดาวเคราะห์, กล่องเกียร์ทรงกระบอก, กล่องเกียร์หนอน, กระปุกเกียร์คู่ขนาน, เป็นต้น, กล่องเกียร์ของดาวเคราะห์เป็นเกียร์ที่แม่นยำ.
