

ステッピングモーターの基本を理解する
導入
ステッピング モーターは、電気パルス信号を角度または直線変位に変換する電磁装置です。. このタイプのモーターは、正確な制御とフィードバック システムを必要としない利点があるため、自動制御の分野で非常に一般的です。. この記事では基本的な概念を紹介します, 働く原則, 種類, 初心者向けステッピングモーターの応用例.
ステッピングモーターとは?
ステッピングモーターは、デジタル信号を通じてモーターの回転を制御するデジタル制御モーターの一種です。. 各電気パルスによりモーターが一定角度回転します。, ステップ角として知られる. この特徴は、 ステッピングモーター 正確な位置制御が必要な状況で非常に役立ちます。.
ステッピングモーターの動作原理
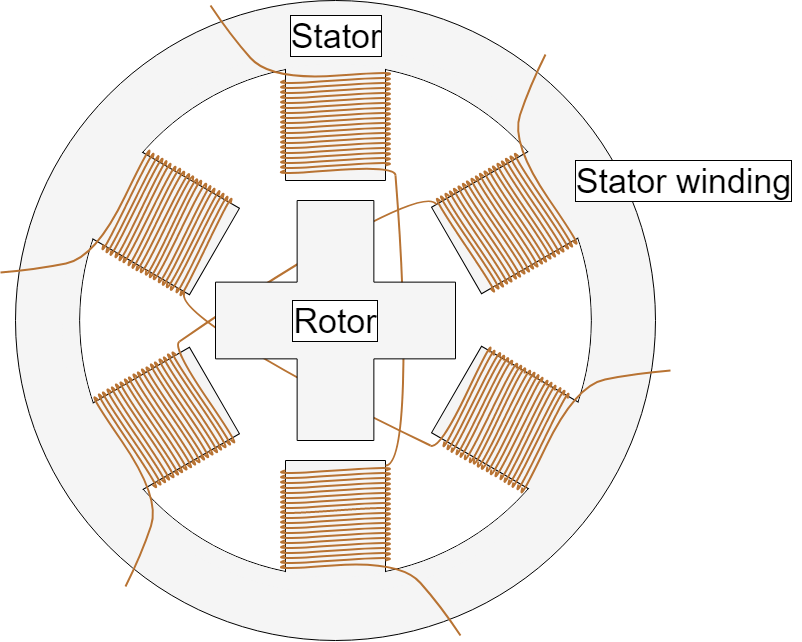
すべてのモーターと同様に, ステッピングモーターには固定部分も含まれています (ステーター) そして可動部分 (ローター). ステーターには、コイルを巻いた歯車のような突起があります。, 一方、ローターは永久磁石または可変リラクタンスコアです。. さまざまなローター構造については後ほど詳しく見ていきます。. 形 1 可変リラクタンス コア ローターを備えたモーターの断面図を示します。.
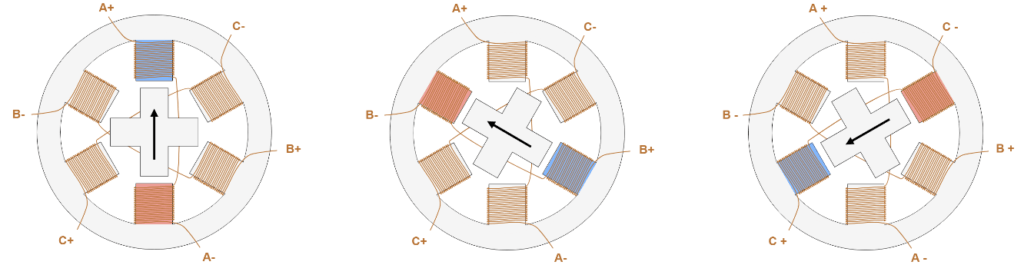
ステッピングモーターの基本的な動作原理は次のとおりです。: 1 つまたは複数のステータの相が通電されている, コイルに電流が流れると磁界が発生します, ローターは磁場と整列します; 異なる相に順番に電圧を印加する, ローターは特定の角度で回転し、最終的に希望の位置に到達します。.
形 2 これがどのように機能するかを示します. 初め, コイル A が通電されて磁場が発生します, ローターの位置が合っている; コイルB通電後, ローターは新しい磁場に合わせて時計回りに 60°回転します。; コイルCの電源が入っているときも同じことが起こります. 下図の固定子の歯の色は、固定子巻線によって生成される磁場の方向を示しています。.
ステッピングモーターの種類と構造
ステッピングモーターの性能 (解像度/ステップかどうか, 速度またはトルク) 工事の内容に左右される, そして同時に, これらの詳細は、モーターの制御方法にも影響を与える可能性があります. 実際には, すべてのステッピング モーターが同じ内部構造を持っているわけではありません (または建設), モーターが異なればローターとステーターの構成も異なるため、.
ローター
ステッピングモーターには基本的に3種類のローターがあります:
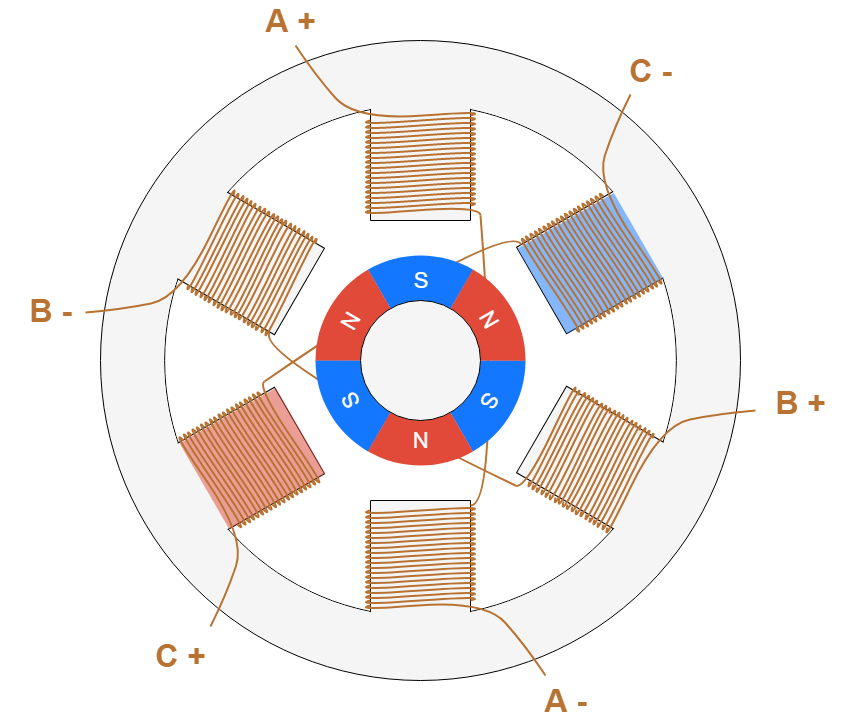
- 永久磁石ローター: ローターは永久磁石です, ステーター回路によって生成される磁界と一致する. このローターは良好なトルクを保証し、制動トルクを備えています。. これは、コイルに通電しているかどうかに関係なく、, モーターは抵抗することができます (あまり強くなくても) 位置の変化. しかし, 他のタイプのローターと比較して, 欠点は速度と解像度の両方が低いことです. 形 3 永久磁石ステッピング モーターの断面図を示します。.
- 可変リラクタンスローター: ローターは鉄心でできており、磁場に合わせて調整できる特殊な形状です。 (図を参照 1 と 2). 高速化と高分解能化が容易なローターです。, ただし、発生するトルクは一般に低く、制動トルクはありません。.
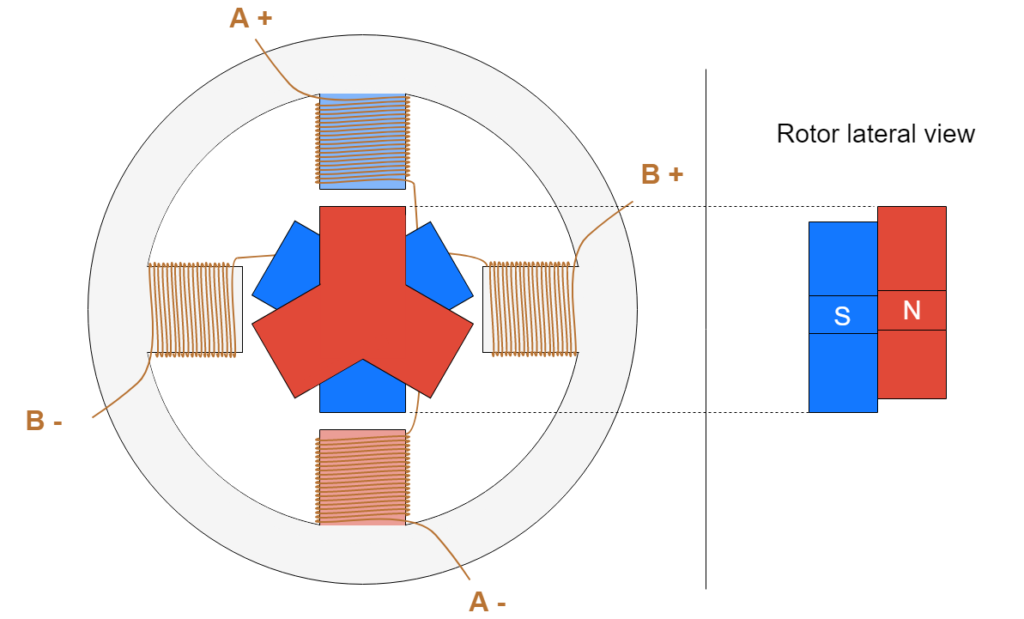
- ハイブリッドローター: このローターは特殊な構造をしています, 永久磁石と可変リラクタンスローターのハイブリッドです. ローターには軸方向に磁化された 2 つの磁気キャップがあります。, 磁気キャップには小さな歯が交互にあります. この構成により、モーターは永久磁石と可変リラクタンス ローターの両方の利点を得ることができます。, 特に高解像度の場合, 高速かつ高トルク. もちろん, より高いパフォーマンス要件はより複雑な構造とより高いコストを意味します. 形 3 このモーター構造の簡略化した回路図を示します。. コイルA通電時, ローター N 磁気キャップの小さな歯は、磁化された S のステーター歯と位置合わせされます。. 同時に, ローターの構造上, ローター S の磁気キャップは磁化 N のステーターの歯と整列します. ステッピングモーターの動作原理は同じですが、, 実際のモーターの構造はもっと複雑です, 歯数は図よりも多くなります. 歯数が多いため、モーターは非常に小さなステッピング角度を得ることができます。, 最小0.9°.
ステータ
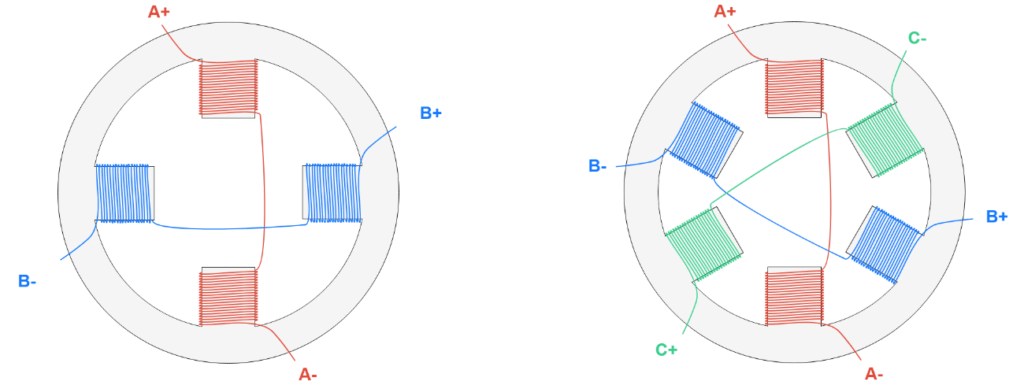
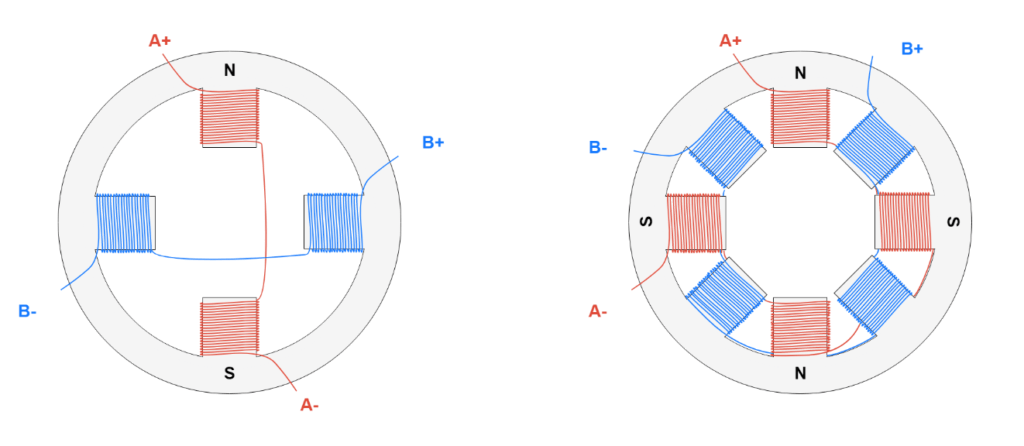
ステーターはモーターの一部であり、ローターがそれに合わせて磁界を生成する役割を果たします。. ステータ回路の主な特性は、その相数に関係します。, 極数とワイヤ構成. 相数は独立したコイルの数です, 極の数は、各相が占める主な歯のペアを表します。. 二相ステッピングモーターが最も一般的に使用されます, 一方、三相および五相モーターはあまり使用されません。 (図を参照 5 と 6).
ステッピングモーターの特徴
- 正確な制御: ステッピングモーターは角度と速度を正確に制御できます.
- フィードバックは不要です: その動作原理により、, ステッピングモーター 通常は位置フィードバック システムを必要としません.
- 制御が簡単: ステッピングモーターはシンプルなパルス信号で制御可能.
- 低速でも高トルク: 低速時, ステッピングモーターは大きなトルクを提供できます.
ステッピングモーターの応用例
ステッピングモーター さまざまな分野で広く使用されています, 含むがこれに限定されない:
- 自動機械: メカニカルアームの位置を正確に制御するため.
- プリンターとスキャナー: プリントヘッドとスキャンヘッドの動きを制御するには.
- ロボット工学: ロボットの関節の動きの制御に.
- 医療機器: 一部の精密医療機器では、コンポーネントの正確な動きを制御するために使用されます。.
ステッピングモーターの選び方?
いつ ステッピングモーターの選択, 次の要素を考慮してください:
- トルク要件: アプリケーションの負荷と速度要件に基づいて適切なトルクを選択してください.
- ステップ角: ステップ角が小さいほど, モーターの分解能が高いほど, そしてコントロールが細かくなればなるほど.
- スピード: アプリケーションのニーズに基づいて適切な速度範囲を選択してください.
- サイズと形状: 設置スペースと設計要件に基づいて適切なモーター サイズを選択してください.
結論
ステッピングモーター 多用途で正確な制御が必要な用途に適しています. この紹介を通して, 初心者はステッピング モーターの基本を理解し、さまざまな用途でステッピング モーターの可能性を探求できるようにする必要があります。. テクノロジーの継続的な進歩により、, ステッピングモーターの応用範囲も拡大し続けています, 最新の自動化と精密制御を強力にサポートします.
グリーンスカイパワー株式会社, 株式会社. 研究に従事する専門メーカーです, 発達, 製造, ステッピングモーターの販売.
プロジェクト用のステッピング モーターを探している場合, 営業チームにお問い合わせください.

