
步進馬達的工作原理: 詳細指南
步進電機 是一種電動機,可將電脈衝轉換為精確的機械運動. 它們廣泛應用於需要高精度和準確度的各種應用, 例如機器人技術, 數控機床, 和 3D 列印機. 本文將深入探討其內部運作原理 步進電機, 探索他們的建設, 操作原理, 以及影響其績效的因素.
步進馬達的構造
步進馬達由幾個關鍵部件組成:
- 定子: 電機的靜止部分, 由多個電磁線圈組成, 稱為定子繞組.
- 轉子: 旋轉部分, 通常由疊片鐵芯製成,其齒與定子磁場對齊.
- 軸: 連接轉子與負載的中心軸.
- 軸承: 支撐轉子並減少旋轉時的摩擦.
- 端蓋: 保護內部組件並將其固定到位.
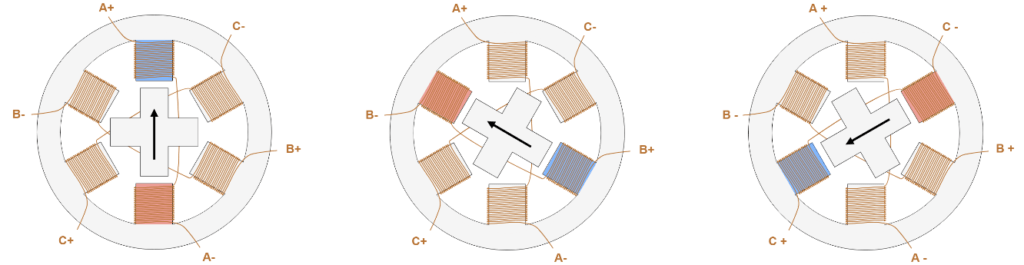
操作原理
的操作 步進電機 基於電磁學的基本原理:
- 電磁感應: 當電流流過定子繞組時, 它產生一個與轉子磁場相互作用的磁場.
- 磁力鎖: 轉子與定子產生的磁場對齊, 鎖定到位.
- 順序激活: 透過順序啟動不同的定子繞組, 這 馬達可控制 磁場的方向和大小, 使轉子以精確的步數旋轉.
控制機制
步進馬達透過一系列電訊號進行控制:
- 脈衝訊號: 馬達接收到的每個脈衝都會使其移動一步.
- 方向控制: 旋轉方向由定子繞組通電順序決定.
- 速度控制: 馬達的速度與輸入脈衝的頻率成正比.
步距角和分辨率
步距角是馬達每走一步轉動的角度. 由定子和轉子的設計決定:
- 全步: 運動的基本單位, 通常 1.8 標準兩相步進馬達的度數.
- 微步: 一種允許馬達採取比全步距角更小的步距的技術, 提高平滑度和分辨率.
驅動模式
步進馬達可以以不同的模式驅動,以實現各種性能特徵:
- 全步模式: 各定子相依序通電, 產生最大步距角.
- 半步模式: 在一相通電和兩相通電之間交替, 將步距角減半.
- 微步模式: 調制定子繞組中的電流以建立中間步驟, 提供更好的控制和更平穩的運動.
細分控制
細分, 或微步進, 是一種提高步進馬達解析度的方法:
- 脈衝細分: 輸入脈衝被分成更小的段, 允許馬達以較小的增量移動.
- 微步進驅動器: 專用控制器可調定子繞組中的電流以實現更精細的步驟.
應用領域
步進電動機用於多種應用 由於其精度和可靠性:





優點和局限性
步進馬達具有多種優勢, 例如:
- 高精度: 能夠高精度控制位置和運動.
- 高可靠性: 不需要回饋系統, 因為馬達的位置本質上是已知的.
- 低維護成本: 運動部件很少,減少了機械故障的可能性.
然而, 他們也有一些限制:
- 效率: 由於其運作性質,高速時效率可能較低.
- 扭力脈動: 馬達步進時扭力輸出的變化, 這會影響順利運行.
結論
步進馬達是一種多功能且可靠的解決方案,適用於需要精確控制運動的應用. 透過了解它們的構造, 手術, 和控制機制, 工程師可以有效地利用步進馬達的力量來滿足其專案的需求. 隨著科技的進步, 步進馬達的性能和能力不斷提高, 為它們在各個行業的使用開闢了新的可能性.
總之, 步進電機 通過將電脈衝通過電磁誘導的組合轉換為機械步驟來工作, 順序激活, 和精確的控制機制. 它們提供高精度和準確度的能力使它們在許多現代技術中不可或缺.
綠天電力公司, 有限公司. 是一家從事研究的專業製造商, 發展, 生產, 銷售步進電機.
如果您正在為您的專案搜尋步進電機, 請聯繫我們的銷售團隊.
