康復機器人用什麼電機(直流電機機器人)?
Rehabilitation robot(直流電機機器人) 使用 Rehabilitation robotics it belongs to a branch of medical robot, due to the popularity of 5G is widely used in medical, rehabilitation and other fields; rehabilitation robot(直流電機機器人) in the joints, 駕駛, tray, walking and other components widely used micro brush DC motor, 無刷直流電機, 步進電機, 空心杯電機, servo and other micro motors, 作為驅動電機. 通常, they are also used together with a reduction gearbox. The following details the types of micro motors and parameters that will be used in rehabilitation robots.
第一的. 直流減速電機
產品分類: 直流減速電機
Product Model:ZWMD008008-152-01
產品規格: Φ8MM product
電壓:4.2V
空載速度:15000-30000轉速
空載電流: <105 嘛 (可以定制)
減速比: 152:1 (可定制)
Rated load:customized on demand

第二, stepper geared motor
產品分類: Stepper geared motor
Outside diameter: 6毫米
材料: Hardware
旋轉方向: 連續波&特定常規武器公約
變速箱回差: ≤3°
軸承: 含油軸承; 滾動軸承
軸向跳動: ≤0.3mm (含油軸承); ≤0.2mm (滾動軸承)
輸出軸徑向載荷: ≤0.5N (含油軸承); ≤5N (滾動軸承)
工作溫度: -20……+85℃

三, 空心杯電機
產品分類: 空心杯減速電機
外徑: 24毫米
材料: 塑料
旋轉方向: 連續波&特定常規武器公約
變速箱回差: ≤3° (可以定制)
軸承:Oil bearing;滾動軸承
軸向跳動: ≤0.1mm(含油軸承);≤0.1mm(滾動軸承)
輸出軸徑向載荷:≤50N(含油軸承);≤100N(滾動軸承)
輸入速度:≤15000轉/分鐘
工作溫度:-20……+85℃

四, 直流有刷電機
產品分類: DC brushed geared motor
外徑: 10毫米
材料: 硬體
旋轉方向: 連續波&特定常規武器公約
變速箱回差: ≤3°
軸承:含油軸承;滾動軸承
軸向跳動: ≤0.3mm(含油軸承);≤0.2mm(滾動軸承)
輸出軸徑向載荷: ≤2N (含油軸承); ≤7N (滾動軸承)
工作溫度: -20 ……+85℃

V. 無刷直流電機
產品分類: Brushless gear motor
Product Specifications:Φ20MM產品
電壓:12V
空載電流:220 mA (可定制)
負載速度:2.4-1000 轉速(可定制))
減速比: 5/25/125/625:1 (可定制)

Six, 定制非標伺服
產品名稱: Robot servo
Project description In order to meet the needs of various types of robot joints developed by modern high technology, we produce robot joint gearboxes with specifications ranging from 3.4MM to 45MM; in order to solve the design and manufacturing precision of the servo gear and the control of the return difference of the servo, we have optimized the design and manufacturing precision of the servo gear according to our many years of R&D and design experience combined with the market demand of robot joints to reduce the return Difference.
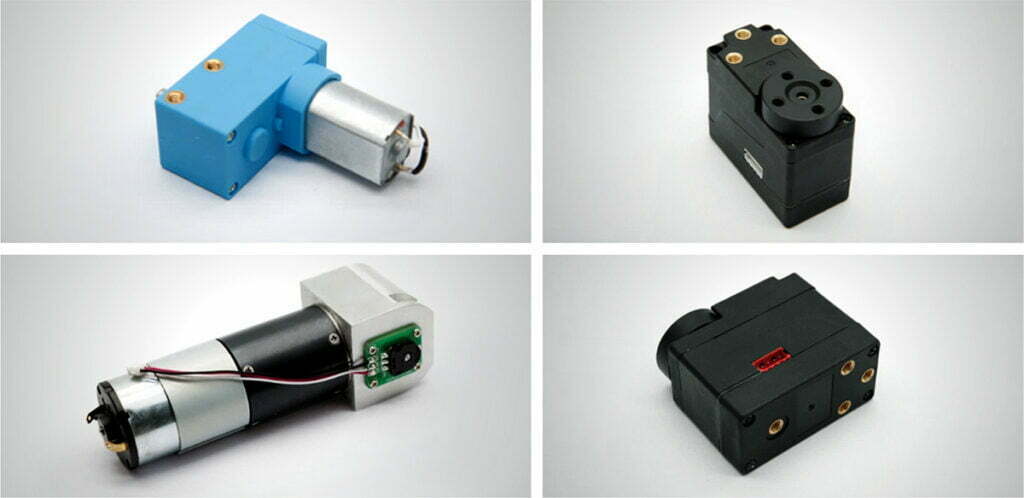
Different parts in the rehabilitation robot, using different micro drive motors, servo, non-standard custom drive motors, usually applied in the joint servo, drive rotation, limb interaction and other drive modules.
