
Khái niệm cơ bản về động cơ DC không chổi than-BLDC — TMC4671-LA
Khi nói đến động cơ DC không chổi than, cần phải kể đến động cơ chổi than. Động cơ chổi than có một nhược điểm khá khó chịu: đó là “ồn ào”.
Vì chổi than và vòng chuyển mạch cần ma sát liên tục, để cung cấp năng lượng cho phần ứng.
Vì thế, nếu bạn muốn một “quạt yên tĩnh”, bạn chắc chắn không thể lựa chọn sử dụng các sản phẩm động cơ chổi than.
Và bàn chải càng dễ bị hư hỏng sau một thời gian dài. Khi dòng điện cao, bạn thậm chí có thể nhìn thấy những chiếc chổi kêu răng rắc và lấp lánh khi đổi hướng.
Không có nhược điểm nào trong số này được tìm thấy trong Động cơ DC không chổi than-BLDC mà chúng tôi sẽ giới thiệu dưới đây!
Chúng tôi sẽ giới thiệu không chổi than Động cơ DC-BLDC (BLDC viết tắt) từ bốn khía cạnh sau.
1, Ưu điểm và nhược điểm của BLDC.
2, Nguyên lý hoạt động của BLDC.
3, Chế độ điều khiển BLDC.
4, Việc sử dụng BLDC thực tế.
1、Ưu điểm và nhược điểm của BLDC
Động cơ DC không chổi than, theo đúng nghĩa đen, tính năng lớn nhất của nó là “không chổi than”, có nghĩa là không có bàn chải.
Vì không có bàn chải, nó rất hoàn hảo để tránh một số thiếu sót của động cơ chổi than. Vì vậy lần lượt, ưu điểm chính của nó là.
1, sống thọ; 2, có thể im lặng; 3, hiệu quả cao (tổn thất thấp); 4, kích thước nhỏ hơn; 5, tính ổn định cao.
- 1. Động cơ DC không chổi than hoạt động ở nhiều tốc độ khác nhau, ở bất kỳ tốc độ nào, có thể chạy hết công suất.
- 2. Khả năng chịu tải vượt trội và hiệu suất vận hành cao.
- 3. Động cơ DC không chổi than nhỏ hơn, phạm vi ứng dụng rộng hơn và mật độ công suất cao hơn so với động cơ chổi than.
- 4. So với điều khiển truyền động của động cơ không đồng bộ, ổ đĩa đơn giản hơn.
- 5. Động cơ DC không chổi than không có cấu trúc cổ góp cơ khí và được bao bọc bên trong, có thể tránh các hạt bụi bay vào bên trong động cơ và dẫn đến nhiều vấn đề khác nhau và độ tin cậy cao.
- 6. Đặc điểm bên ngoài tốt hơn, hoạt động tốc độ thấp, có thể tạo ra mô-men xoắn lớn, có thể cung cấp một mô-men xoắn khởi động tương đối lớn.
Nhược điểm của BLDC
Hãy quay lại câu hỏi còn lại phía trước: nhược điểm của BLDC là gì?
Tôi tin bạn đã đoán được rồi: chúng ta đã dành rất nhiều không gian để nói về phương pháp điều khiển BLDC, đủ để thấy sự khó khăn trong việc kiểm soát của nó, so với động cơ chổi than, cao hơn rất nhiều!
Vì vậy nhược điểm lớn nhất của BLDC là độ khó điều khiển cao và giá lái ESC cao (Kiểm soát tốc độ điện tử, ESC viết tắt).
Nó cũng có nhược điểm là BLDC do điện trở cảm ứng, sự khởi đầu sẽ đi kèm với jitter, không giống như động cơ chổi than khởi động rất êm.
Hiện tại, có ba phương pháp điều khiển động cơ không chổi than chính thống như sau.
1、Điều khiển sóng vuông.
Còn được gọi là điều khiển sóng hình thang, 120° kiểm soát, 6-điều khiển chuyển mạch bước
Phương pháp điều khiển sóng vuông có ưu điểm là thuật toán điều khiển đơn giản, chi phí phần cứng thấp, việc sử dụng hiệu suất thông thường của bộ điều khiển sẽ có thể đạt được tốc độ động cơ cao.
Nhược điểm là dao động mô-men xoắn lớn, có một lượng nhiễu hiện tại nhất định, và hiệu quả không đạt đến mức tối đa. Điều khiển sóng vuông phù hợp cho các ứng dụng không yêu cầu hiệu suất quay động cơ cao.
Điều khiển sóng vuông sử dụng cảm biến Hall hoặc thuật toán ước lượng không cần cảm biến để thu được vị trí của rôto động cơ, và sau đó thực hiện sáu phép đổi (cứ 60° lại có một cái) dựa trên vị trí rôto trong chu kỳ điện 360°.
Tại mỗi vị trí chuyển mạch, động cơ tạo ra một lực theo một hướng cụ thể, nên có thể nói độ chính xác vị trí của điều khiển sóng vuông là góc điện 60°.
Vì dạng sóng pha của động cơ gần với sóng vuông trong cách điều khiển này, nó được gọi là điều khiển sóng vuông.

2、kiểm soát sóng hình sin.
Phương pháp điều khiển sóng sin sử dụng sóng SVPWM, và đầu ra là điện áp sóng hình sin 3 pha, và dòng điện tương ứng cũng là dòng điện hình sin.
Phương pháp này không có khái niệm chuyển mạch điều khiển sóng vuông, hoặc nghĩ rằng một chu trình điện có vô số chuyển mạch.
Rõ ràng, so với điều khiển sóng vuông, điều khiển sóng hình sin có ít dao động mô-men xoắn hơn và ít sóng hài hơn, điều này làm cho việc điều khiển có cảm giác hơn “thanh tú”, nhưng yêu cầu thực hiện của bộ điều khiển cao hơn một chút so với điều khiển sóng vuông, và hiệu suất của động cơ không thể được tối đa hóa.
3、Kiểm soát FOC

Còn được gọi là chuyển đổi tần số vectơ, điều khiển hướng vector từ trường
Điều khiển sóng sin thực hiện điều khiển vectơ điện áp, gián tiếp thực hiện việc kiểm soát kích thước hiện tại, nhưng không thể điều khiển được chiều dòng điện.
Phương pháp điều khiển FOC có thể coi là phiên bản nâng cấp của điều khiển sóng sin, thực hiện việc điều khiển vector hiện tại, tức là, điều khiển vector của trường stator động cơ.
Vì hướng của từ trường stato được điều khiển, trường stato và trường rôto có thể luôn được giữ ở 90°, và có thể đạt được công suất mô-men xoắn cực đại ở một dòng điện nhất định.
Ưu điểm của phương pháp kiểm soát FOC là: dao động mô-men xoắn thấp, hiệu quả cao, tiếng ồn thấp và phản ứng năng động nhanh.
Nhược điểm là: chi phí phần cứng cao hơn, yêu cầu cao hơn về hiệu suất của bộ điều khiển, và các thông số động cơ cần phải phù hợp.
FOC hiện là lựa chọn tốt nhất để điều khiển hiệu quả động cơ DC không chổi than (BLDC) và động cơ đồng bộ nam châm vĩnh cửu (PMSM).
FOC điều khiển chính xác cường độ và hướng của từ trường, làm cho mô-men xoắn động cơ trơn tru, tiếng ồn thấp, hiệu quả cao, và có phản ứng động tốc độ cao.
Do những lợi thế rõ ràng của FOC, nhiều công ty hiện đang dần thay thế việc kiểm soát các sản phẩm truyền thống bằng FOC cho nhiều ứng dụng.
Đức Trinamic có chip điều khiển servo với điều khiển vector từ trường (FOC) — TMC4671-LA
– Chế độ điều khiển mô-men xoắn
– Chế độ kiểm soát tốc độ
– Chế độ điều khiển vị trí
– Tần số làm mới điều khiển hiện tại và tần sốPWM tối đa là 100KHz (tần số làm mới để kiểm soát tốc độ và vị trí có thể được cấu hình là bội số của tần số làm mới hiện tại)

TMC4671 là chip điều khiển servo tích hợp đầy đủ cung cấp khả năng điều khiển hướng từ trường cho động cơ DC không chổi than, động cơ đồng bộ nam châm vĩnh cửu, 2-động cơ bước pha, Động cơ DC chải và động cơ cuộn dây bằng giọng nói.
Mọi chức năng điều khiển đều được tích hợp vào phần cứng. Với ADC tích hợp, giao diện cảm biến vị trí, và sự khác biệt về vị trí, bộ điều khiển servo đầy đủ tính năng này phù hợp với nhiều ứng dụng servo.
2、Nguyên lý hoạt động của BLDC
BLDC là một loại động cơ, vì vậy thành phần cơ bản nhất của nó không thể tách rời khỏi stato và rôto.
Stator của động cơ chổi than là nam châm vĩnh cửu, trong khi rôto của nó là một cuộn dây có điện (quanh co). Như thể hiện trong hình dưới đây.

Nhưng đối với BLDC, điều ngược lại là đúng!
Stator (stato) của BLDC là một cuộn dây được cấp điện, trong khi rôto là nam châm vĩnh cửu!

Từ “Định luật Maxwell-Ampe”, chúng ta có thể biết rằng không gian gần cuộn dây mang điện sẽ tạo ra một từ trường. Và hướng phân bố từ trường, chúng ta có thể sử dụng “quy tắc bàn tay phải” để rút ra.
Trong thực tế, đây là những gì chúng ta thường gọi “nam châm điện”!
Sau đó, điều tiếp theo là đơn giản, tính chất của nam châm là gì?
Cùng giới tính đẩy nhau, người khác giới thu hút lẫn nhau!
Vì thế, chúng ta chỉ cần cho cuộn dây trên stato tiếp cận chiều dòng điện thích hợp, đó là, sao cho các cực từ của hướng nam châm điện.
Vì thế, chúng ta chỉ cần nối cuộn dây trên stato theo chiều dòng điện thích hợp, đó là, Cho chiều của các cực từ của nam châm điện và chiều của các cực từ của nam châm vĩnh cửu trùng nhau một cách chính xác., không thể đẩy lùi được, hoặc hút rôto làm chuyển động quay.
Tối ưu hóa stato
Phương pháp lái xe trên, I E. cấp điện cho từng cuộn dây riêng lẻ theo trình tự, khả thi nhưng quá cồng kềnh và không hiệu quả.
Vì thế, BLDC thực tế sẽ kết hợp sáu cuộn dây đó thành hai và chia chúng thành ba cuộn dây, MỘT, b, và C, như sau.

Bằng cách này chúng ta có thể điều khiển hai nam châm điện cùng một lúc, ngay lập tức tăng gấp đôi hiệu quả.
Nhưng điều này chỉ với nam châm “sự thu hút” đặc trưng, đừng quên rằng nam châm cũng “lực đẩy” đặc trưng.
Nếu chúng ta dẫn động một bộ cuộn dây khác cùng lúc, sao cho bộ cuộn dây trước đó “thu hút” rôto khi bộ cuộn dây khác “đẩy lùi” cánh quạt, khi đó cánh quạt của chúng ta sẽ có động lực cao hơn!
Cho đến nay, mô hình này đã bắt đầu tiếp cận sản phẩm BLDC thực tế.
Nhưng đối với mô hình trên
Tuy nhiên, cho mô hình trên, chúng ta cần cung cấp cho hai cuộn dây hai bộ nguồn ngược chiều nhau để đạt được hiệu quả “sự thu hút” Và “lực đẩy” đồng thời.
Điều này quá phức tạp và tốn kém cho các ứng dụng thực tế.
Tiếp theo chúng ta sẽ nói về “Phương pháp điều khiển BLDC”, điều đó sẽ giải quyết được vấn đề trên.
3、Phương pháp điều khiển BLDC
Bản gốc A, b, C ba cuộn dây độc lập, vì vậy việc kiểm soát chúng là rất rắc rối.
Sau đó nếu chúng ta nối ba cuộn dây của A,b,C lại với nhau và tập hợp một “sắp xếp sao”, kết quả sẽ là gì?

Ban đầu có ba cuộn dây, dẫn đến sáu dòng; bây giờ dẫn đến dòng giảm xuống chỉ còn ba dòng, vậy làm thế nào để đạt được hiệu quả điều khiển tương tự với sáu đường được kết nối như vậy?
Hình sau.
Cực dương của nguồn điện được nối với góc trên bên phải của đầu vào cuộn dây A, trong khi cực âm của nguồn điện được nối với góc dưới bên trái của đầu ra cuộn dây B.
Lần này cuộn dây A và cuộn dây B được dẫn động cùng lúc, và cực của nó hoàn toàn ngược lại, để đạt được hiệu quả tương tự khi ba cuộn dây được dẫn động độc lập!
Vì vậy bằng cách làm theo trình tự này: AB-AC-BC-BA-CA-CB, sáu nhịp, và lần lượt quấn các cuộn dây stato, rôto có thể tiếp tục quay!
Sáu công tắc điện tử có thể được sử dụng để điều khiển sáu nhịp này, như sau.
Phát hiện vị trí
Mặc dù chúng ta đã biết cách điều khiển sáu nhịp của rôto.
Nhưng bạn đã tìm thấy một vấn đề mới: nếu bạn không biết vị trí của rôto, làm sao bạn biết khi nào nên lái xe quanh co nào?
Vì vậy chúng ta phải biết vị trí hiện tại của rôto!
Và vị trí của rôto được phát hiện theo hai cách chung.
1, Phương pháp phát hiện cảm biến Hall.
Hình sau, đặt stator H1,H2,H3, ba cảm biến Hall, bạn có thể biết chính xác vị trí hiện tại của stato.
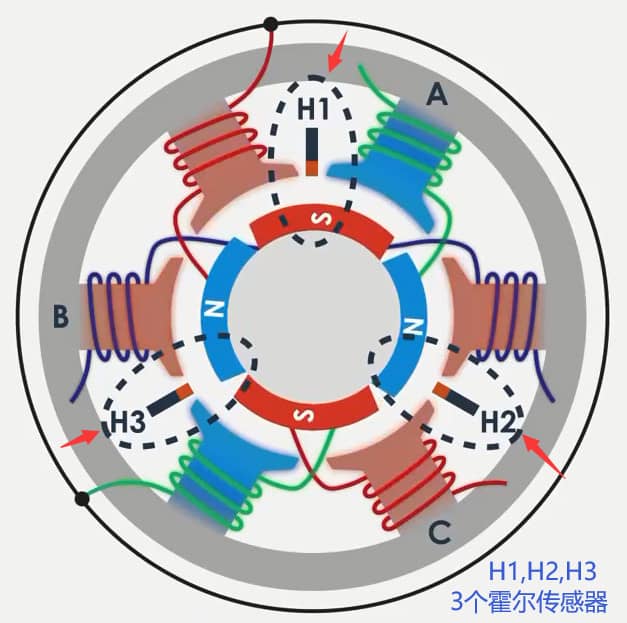
Đầu ra cảm biến Hall với mức cao và thấp để biểu thị.

2, phương pháp phát hiện lực điện động ngược
Phương pháp phát hiện EMF trở lại dựa trên nguyên lý cảm ứng điện từ.
Khi từ trường (từ thông) xung quanh một thay đổi quanh co không được cấp điện, một điện thế được tạo ra trong cuộn dây này.
Bằng cách phát hiện độ lớn và hướng của điện thế này, chúng ta cũng có thể biết vị trí hiện tại của stato.

Hai phương pháp phát hiện này đều có ưu điểm và nhược điểm.
Phát hiện cảm biến Hall chính xác hơn một chút, nhưng cũng tốn kém hơn.
Ngược lại, phương pháp phát hiện lực điện động ngược tiết kiệm hơn, nhưng hơi kém chính xác.
Rôto bên trong hoặc rôto bên ngoài
BLDC có hai loại cấu trúc: rôto bên trong được gọi là rôto bên trong BLDC; ngược lại, rôto bên ngoài gọi là rôto ngoài BLDC.

Nói một cách tương đối, rôto bên ngoài BLDC được sử dụng thường xuyên hơn.
Nguyên nhân chính là do rôto BLDC bên ngoài có kết cấu cơ khí ổn định hơn. Điều này là do rôto động cơ có xu hướng giãn nở ra phía ngoài do lực ly tâm khi vận hành ở tốc độ cao..
Vì vậy rôto bên trong BLDC cần độ chính xác cơ học rất cao để đảm bảo rôto và stato không đánh nhau.
Nhưng nếu khoảng cách dự trữ quá xa, nó sẽ dẫn đến rò rỉ từ tính và ảnh hưởng đến hiệu suất chung của động cơ.
Nhưng đây không phải là vấn đề với BLDC rôto bên ngoài, bởi vì rôto bên ngoài đương nhiên không bị ảnh hưởng bởi sự giãn nở.
4、Ứng dụng thực tế của BLDC
Vậy thì chúng ta hãy xem phần tiếp theo, các kịch bản ứng dụng thực tế của BLDC.
1, quạt làm mát im lặng làm mát không khí là lựa chọn hàng đầu để làm mát nhiều thiết bị.
Ví dụ, nhiều thứ chính “im lặng” khung gầm trên thị trường, nếu sử dụng làm mát không khí, quạt tản nhiệt bên trong về cơ bản là sử dụng BLDC.
Đế tản nhiệt cho laptop cũng được sử dụng phổ biến BLDC, ngoài ra còn có một số hệ thống làm mát thông gió lớn bên trong, việc sử dụng quạt BLDC. Ngoài ra còn có máy thổi khí tốc độ cao và các sản phẩm khác.
2, Máy bay không người lái đa trục được sử dụng trong BLDC công suất lớn hơn, thích ứng với ESC thích hợp (THOÁT), sau đó sử dụng xung điều khiển tốc độ BLDC để điều khiển tốc độ BLDC rất tiện lợi.

3, Dụng cụ điện và các sản phẩm khác, chẳng hạn như lô điện, Cờ lê điện sản xuất trong nước về cơ bản được sử dụng BLDC, và hầu hết các máy khoan cầm tay.
Chủ yếu là do hiệu quả cao của BLDC, và làm cho các dụng cụ điện chạy bằng pin hoạt động lâu hơn. Một điểm nữa là mô-men xoắn đầu ra của động cơ không chổi than rất ổn định..
Ngoài ra còn có máy nén tủ lạnh, quạt làm mát tủ đông, cũng như máy lọc không khí, máy hút bụi/máy quét, súng fascia, vân vân., đang rất hot trong những năm gần đây, hầu hết trong số đó được điều khiển bởi BLDC.
