
พื้นฐาน BLDC มอเตอร์ DC แบบไร้แปรงถ่าน — TMC4671-LA
เมื่อพูดถึงมอเตอร์กระแสตรงไร้แปรงถ่าน, จำเป็นต้องพูดถึงมอเตอร์แปรง. มอเตอร์แปรงถ่านมีข้อเสียค่อนข้างน่ารำคาญ: นั่นคือ “เสียงดัง”.
เนื่องจากแปรงและวงแหวนสับเปลี่ยนต้องมีการเสียดสีอย่างต่อเนื่อง, เพื่อที่จะเสริมพลังให้กับกระดอง.
ดังนั้น, ถ้าคุณต้องการ “พัดลมที่เงียบสงบ”, คุณไม่สามารถเลือกใช้ผลิตภัณฑ์มอเตอร์แปรงถ่านได้อย่างแน่นอน.
และแปรงก็มีแนวโน้มที่จะเสียหายหลังจากผ่านไปนาน. เมื่อกระแสสูง, คุณยังสามารถเห็นแปรงแตกและเกิดประกายไฟเมื่อเปลี่ยนทิศทาง.
ไม่พบข้อเสียเหล่านี้ใน มอเตอร์กระแสตรงไร้แปรงถ่าน-BLDC ที่เราจะแนะนำด้านล่างนี้!
เราจะมาแนะนำแบบไร้แปรงถ่าน มอเตอร์กระแสตรง-BLDC (BLDC เรียกสั้นๆ ว่า) จากสี่ด้านต่อไปนี้.
1, ข้อดีและข้อเสียของ BLDC.
2, หลักการทำงานของ BLDC.
3, โหมดการควบคุมของ BLDC.
4, การใช้งานจริงของ BLDC.
1、ข้อดีและข้อเสียของ BLDC
มอเตอร์กระแสตรงไร้แปรงถ่าน, อย่างแท้จริง, คุณสมบัติที่ใหญ่ที่สุดของมันคือ “ไม่มีแปรง”, ซึ่งหมายความว่าไม่มีแปรง.
เพราะไม่มีแปรง, มันสมบูรณ์แบบมากที่จะหลีกเลี่ยงข้อบกพร่องหลายประการของมอเตอร์แปรง. ในทางกลับกัน, ข้อได้เปรียบหลักคือ.
1, อายุยืน; 2, สามารถเงียบได้; 3, ประสิทธิภาพสูง (การสูญเสียต่ำ); 4, ขนาดที่เล็กกว่า; 5, ความมั่นคงสูง.
- 1. มอเตอร์กระแสตรงไร้แปรงถ่านทำงานในช่วงความเร็วที่หลากหลาย, ด้วยความเร็วเท่าใดก็ได้, สามารถวิ่งได้อย่างเต็มกำลัง.
- 2. ความจุเกินที่โดดเด่นและประสิทธิภาพการทำงานสูง.
- 3. มอเตอร์กระแสตรงไร้แปรงถ่านมีขนาดเล็กกว่า, ใช้งานได้หลากหลายกว่าและมีความหนาแน่นของพลังงานสูงกว่าเมื่อเทียบกับมอเตอร์แบบแปรงถ่าน.
- 4. เมื่อเทียบกับการควบคุมการขับเคลื่อนของมอเตอร์อะซิงโครนัส, ไดรฟ์นั้นง่ายกว่า.
- 5. มอเตอร์กระแสตรงไร้แปรงถ่านไม่มีโครงสร้างกลไกสับเปลี่ยนและถูกปิดไว้ด้านใน, ซึ่งสามารถหลีกเลี่ยงฝุ่นละอองที่ลอยเข้ามาด้านในของมอเตอร์และนำไปสู่ปัญหาต่างๆและความน่าเชื่อถือสูง.
- 6. ลักษณะภายนอกดีขึ้น, การทำงานด้วยความเร็วต่ำ, สามารถส่งแรงบิดขนาดใหญ่ได้, สามารถให้แรงบิดเริ่มต้นได้ค่อนข้างมาก.
ข้อเสียของ BLDC
กลับไปที่คำถามที่อยู่ข้างหน้ากัน: BLDC มีข้อเสียอะไรบ้าง?
ฉันเชื่อว่าคุณเดาได้แล้ว: เราใช้พื้นที่มากมายในการพูดคุยเกี่ยวกับวิธีการควบคุมของ BLDC, มากพอที่จะมองเห็นความยากในการควบคุมของมัน, เมื่อเทียบกับมอเตอร์แปรงถ่าน, สูงกว่ามาก!
ดังนั้นข้อเสียที่ใหญ่ที่สุดของ BLDC ก็คือความยากในการควบคุมที่สูงและราคาในการขับ ESC ที่สูง (ระบบควบคุมความเร็วแบบอิเล็กทรอนิกส์, ESC เรียกสั้นๆ ว่า).
นอกจากนี้ยังมีข้อเสียที่ BLDC เนื่องจากความต้านทานแบบเหนี่ยวนำ, การเริ่มต้นจะมาพร้อมกับความกระวนกระวายใจ, ต่างจากมอเตอร์แปรงสตาร์ทที่นุ่มนวลมาก.
ในปัจจุบัน, มีวิธีการควบคุมมอเตอร์ไร้แปรงถ่านหลักสามวิธีดังนี้.
1、การควบคุมคลื่นสี่เหลี่ยม.
เรียกอีกอย่างว่าการควบคุมคลื่นสี่เหลี่ยมคางหมู, 120°การควบคุม, 6-การควบคุมการเปลี่ยนขั้นตอน
วิธีการควบคุมคลื่นสี่เหลี่ยมมีข้อดีของอัลกอริธึมการควบคุมแบบง่าย, ต้นทุนฮาร์ดแวร์ต่ำ, การใช้ประสิทธิภาพตามปกติของ ตัวควบคุม จะได้ความเร็วรอบมอเตอร์สูง.
ข้อเสียคือแรงบิดมีความผันผวนมาก, มีเสียงรบกวนในปัจจุบันจำนวนหนึ่ง, และประสิทธิภาพไม่ถึงขีดสูงสุด. การควบคุมคลื่นสี่เหลี่ยมเหมาะสำหรับการใช้งานที่ไม่ต้องการประสิทธิภาพการหมุนของมอเตอร์สูง.
การควบคุมคลื่นสี่เหลี่ยมใช้เซ็นเซอร์ฮอลล์หรืออัลกอริธึมการประมาณค่าแบบไร้เซ็นเซอร์เพื่อให้ได้ตำแหน่งของโรเตอร์มอเตอร์, แล้วทำการสับเปลี่ยนหกครั้ง (หนึ่งอันทุกๆ 60°) ขึ้นอยู่กับตำแหน่งของโรเตอร์ภายในวงจรไฟฟ้า 360°.
ในแต่ละตำแหน่งสับเปลี่ยน มอเตอร์จะส่งแรงออกมาในทิศทางเฉพาะ, จึงสามารถกล่าวได้ว่าความแม่นยำของตำแหน่งของการควบคุมคลื่นสี่เหลี่ยมคือไฟฟ้า 60°.
เนื่องจากรูปคลื่นกระแสเฟสของมอเตอร์อยู่ใกล้กับคลื่นสี่เหลี่ยมในลักษณะการควบคุมนี้, เรียกว่าการควบคุมคลื่นสี่เหลี่ยม.

2、การควบคุมคลื่นไซน์.
วิธีการควบคุมคลื่นไซน์ใช้คลื่น SVPWM, และเอาต์พุตเป็นแรงดันคลื่นไซน์ 3 เฟส, และกระแสที่สอดคล้องกันก็เป็นกระแสคลื่นไซน์ด้วย.
วิธีการนี้ไม่มีแนวคิดเรื่องการเปลี่ยนการควบคุมคลื่นสี่เหลี่ยม, หรือคิดว่าวงจรไฟฟ้ามีจำนวนการสับเปลี่ยนไม่สิ้นสุด.
อย่างชัดเจน, เมื่อเทียบกับการควบคุมคลื่นสี่เหลี่ยม, การควบคุมคลื่นไซน์มีความผันผวนของแรงบิดน้อยลงและมีฮาร์โมนิคกระแสน้อยลง, ซึ่งทำให้รู้สึกควบคุมได้มากขึ้น “ละเอียดอ่อน”, แต่ข้อกำหนดด้านประสิทธิภาพของ ตัวควบคุม สูงกว่าการควบคุมคลื่นสี่เหลี่ยมเล็กน้อย, และไม่สามารถเพิ่มประสิทธิภาพของมอเตอร์ให้สูงสุดได้.
3、การควบคุมเอฟโอซี

เรียกอีกอย่างว่าการแปลงความถี่เวกเตอร์, การควบคุมทิศทางเวกเตอร์ของสนามแม่เหล็ก
การควบคุมคลื่นไซน์ทำให้สามารถควบคุมเวกเตอร์แรงดันไฟฟ้าได้, ตระหนักถึงการควบคุมขนาดปัจจุบันทางอ้อม, แต่ไม่สามารถควบคุมทิศทางของกระแสได้.
วิธีการควบคุม FOC ถือได้ว่าเป็นการควบคุมคลื่นไซน์เวอร์ชันอัปเกรด, ซึ่งตระหนักถึงการควบคุมเวกเตอร์ปัจจุบัน, เช่น., การควบคุมเวกเตอร์ของสนามสเตเตอร์ของมอเตอร์.
เนื่องจากมีการควบคุมทิศทางของสนามสเตเตอร์, สนามสเตเตอร์และสนามโรเตอร์สามารถรักษาไว้ที่ 90° ได้ตลอดเวลา, และสามารถรับแรงบิดสูงสุดที่กระแสที่แน่นอนได้.
ข้อดีของวิธีการควบคุม FOC คือ: ความผันผวนของแรงบิดต่ำ, ประสิทธิภาพสูง, สัญญาณรบกวนต่ำและการตอบสนองแบบไดนามิกที่รวดเร็ว.
ข้อเสียคือ: ต้นทุนฮาร์ดแวร์ที่สูงขึ้น, ข้อกำหนดที่สูงขึ้นสำหรับประสิทธิภาพของคอนโทรลเลอร์, และพารามิเตอร์ของมอเตอร์ต้องตรงกัน.
ปัจจุบัน FOC เป็นตัวเลือกที่ดีที่สุดสำหรับการควบคุมมอเตอร์กระแสตรงไร้แปรงถ่านอย่างมีประสิทธิภาพ (บีแอลดีซี) และมอเตอร์ซิงโครนัสแม่เหล็กถาวร (PMSM).
FOC ควบคุมขนาดและทิศทางของสนามแม่เหล็กอย่างแม่นยำ, ซึ่งทำให้แรงบิดของมอเตอร์ราบรื่น, เสียงเบา, ประสิทธิภาพสูง, และมีการตอบสนองไดนามิกความเร็วสูง.
เนื่องจากข้อดีที่ชัดเจนของ FOC, ปัจจุบันบริษัทหลายแห่งกำลังค่อยๆ เปลี่ยนการควบคุมผลิตภัณฑ์แบบเดิมด้วย FOC สำหรับการใช้งานจำนวนมาก.
Trinamic ของเยอรมนีมีชิปควบคุมเซอร์โวพร้อมการควบคุมเวกเตอร์สนามแม่เหล็ก (ฟค) — TMC4671-LA
– โหมดควบคุมแรงบิด
– โหมดควบคุมความเร็ว
– โหมดควบคุมตำแหน่ง
– ความถี่การรีเฟรชการควบคุมปัจจุบันและความถี่ PWM สูงสุด 100KHz (ความถี่การรีเฟรชสำหรับการควบคุมความเร็วและตำแหน่งสามารถกำหนดค่าเป็นจำนวนเท่าของความถี่การรีเฟรชปัจจุบันในปัจจุบันได้)

TMC4671 เป็นชิปควบคุมเซอร์โวแบบครบวงจรที่ให้การควบคุมทิศทางของสนามแม่เหล็กสำหรับมอเตอร์กระแสตรงแบบไร้แปรงถ่าน, มอเตอร์ซิงโครนัสแม่เหล็กถาวร, 2-เฟสสเต็ปเปอร์มอเตอร์, มอเตอร์กระแสตรงแบบมีแปรงถ่านและมอเตอร์คอยล์เสียง.
ฟังก์ชั่นการควบคุมทั้งหมดรวมอยู่ในฮาร์ดแวร์แล้ว. ด้วย ADC ในตัว, อินเทอร์เฟซเซ็นเซอร์ตำแหน่ง, และส่วนต่างของตำแหน่ง, ตัวควบคุมเซอร์โวที่มีคุณสมบัติครบถ้วนนี้เหมาะสำหรับการใช้งานเซอร์โวที่หลากหลาย.
2、หลักการทำงานของ BLDC
BLDC เป็นมอเตอร์ชนิดหนึ่ง, ดังนั้นองค์ประกอบพื้นฐานที่สุดจึงแยกออกจากสเตเตอร์และโรเตอร์ไม่ได้.
สเตเตอร์ของมอเตอร์แปรงถ่านเป็นแม่เหล็กถาวร, ในขณะที่โรเตอร์ของมันเป็นคอยล์ที่มีพลังงาน (คดเคี้ยว). ดังแสดงในรูปด้านล่าง.

แต่สำหรับบีแอลดีซี, ตรงกันข้ามคือเรื่องจริง!
สเตเตอร์ (สเตเตอร์) ของ BLDC คือขดลวดที่มีพลังงาน, ในขณะที่โรเตอร์เป็นแม่เหล็กถาวร!

จาก “กฎของแมกซ์เวลล์-แอมแปร์”, เราสามารถรู้ได้ว่าพื้นที่ใกล้กับขดลวดที่มีพลังงานจะสร้างสนามแม่เหล็ก. และทิศทางการกระจายตัวของสนามแม่เหล็ก, เราสามารถใช้ “กฎมือขวา” เพื่อให้ได้มา.
ในความเป็นจริง, นี่คือสิ่งที่เรามักเรียกว่า “แม่เหล็กไฟฟ้า”!
แล้วสิ่งต่อไปก็ง่าย, คุณสมบัติของแม่เหล็กคืออะไร?
เพศเดียวกันจะผลักกัน, เพศตรงข้ามดึงดูดกัน!
ดังนั้น, เราแค่ต้องให้ขดลวดบนสเตเตอร์เพื่อเข้าถึงทิศทางที่เหมาะสมของกระแส, นั่นคือ, เพื่อให้ขั้วแม่เหล็กมีทิศทางแม่เหล็กไฟฟ้า.
ดังนั้น, เราเพียงแค่ต้องเชื่อมต่อคอยล์บนสเตเตอร์กับทิศทางกระแสที่เหมาะสม, นั่นคือ, ให้ทิศทางของขั้วแม่เหล็กของแม่เหล็กไฟฟ้าและทิศทางของขั้วแม่เหล็กของแม่เหล็กถาวรตรงกันทุกประการ, ไม่อาจขับไล่ได้, หรือดึงดูดให้โรเตอร์ทำการเคลื่อนที่แบบหมุน.
การเพิ่มประสิทธิภาพของสเตเตอร์
วิธีการขับขี่ข้างต้น, เช่น. การเพิ่มพลังงานแต่ละขดลวดแยกกันตามลำดับ, เป็นไปได้แต่ยุ่งยากและไร้ประสิทธิภาพเกินไป.
ดังนั้น, BLDC จริงจะรวมหกขดลวดเหล่านั้นสองต่อสองและแบ่งออกเป็นสามขดลวด, ก, บี, และซี, ดังต่อไปนี้.

ด้วยวิธีนี้เราสามารถขับเคลื่อนแม่เหล็กไฟฟ้าสองตัวพร้อมกันได้, ซึ่งเพิ่มประสิทธิภาพเป็นสองเท่าทันที.
แต่นี่เป็นเพียงแม่เหล็กเท่านั้น “สถานที่ท่องเที่ยว” ลักษณะเฉพาะ, อย่าลืมว่าแม่เหล็กด้วย “การขับไล่” ลักษณะเฉพาะ.
ถ้าเราขับคอยล์อีกชุดหนึ่งไปพร้อมๆ กัน, เพื่อให้คอยล์ชุดที่แล้ว “ดึงดูด” โรเตอร์เมื่อขดลวดอีกชุดหนึ่ง “ขับไล่” โรเตอร์, แล้วโรเตอร์ของเราก็จะได้แรงขับเคลื่อนที่สูงขึ้น!
จนถึงตอนนี้, รุ่นนี้เริ่มเข้าใกล้ผลิตภัณฑ์ BLDC จริงแล้ว.
แต่สำหรับรุ่นข้างต้น
อย่างไรก็ตาม, สำหรับรุ่นข้างต้น, เราจำเป็นต้องจ่ายขดลวดสองเส้นด้วยกำลังสองชุดในทิศทางตรงกันข้ามเพื่อให้ได้ผล “สถานที่ท่องเที่ยว” และ “การขับไล่” ในเวลาเดียวกัน.
สิ่งนี้ซับซ้อนเกินไปและมีค่าใช้จ่ายสูงสำหรับการใช้งานจริง.
ต่อไปเราจะพูดถึง “วิธีการควบคุม BLDC”, ซึ่งจะแก้ปัญหาข้างต้นได้.
3、วิธีการควบคุมของ BLDC
คนเดิม เอ, บี, C ขดลวดสามเส้นมีความเป็นอิสระ, การควบคุมพวกมันจึงเป็นเรื่องยากมาก.
แล้วถ้าเราเชื่อมต่อขดลวดทั้งสามของ A,บี,C เข้าด้วยกันและประกอบเข้าด้วยกัน “การจัดเรียงดาว”, ผลลัพธ์จะเป็นอย่างไร?

เดิมทีมีสามขดลวด, นำไปสู่หกบรรทัด; ตอนนี้นำไปสู่เส้นลดเหลือเพียงสามบรรทัดเท่านั้น, ดังนั้นวิธีการบรรลุผลการควบคุมแบบเดียวกันโดยเชื่อมต่อหกบรรทัดเข้าด้วยกัน?
รูปต่อไปนี้.
ด้านบวกของแหล่งจ่ายไฟเชื่อมต่อกับมุมขวาบนของอินพุตขดลวด A, ในขณะที่ด้านลบของแหล่งจ่ายไฟเชื่อมต่อกับมุมซ้ายล่างของเอาต์พุตขดลวด B.
คราวนี้ขดลวด A และขดลวด B ถูกขับเคลื่อนพร้อมกัน, และมีขั้วของมันตรงกันข้ามทุกประการ, เพื่อให้บรรลุผลเช่นเดียวกันเมื่อขดลวดทั้งสามถูกขับเคลื่อนอย่างอิสระ!
ดังนั้นโดยทำตามลำดับนี้: AB-AC-BC-BA-CA-CB, หกจังหวะ, และหมุนขดลวดสเตเตอร์ตามลำดับ, โรเตอร์สามารถหมุนต่อไปได้!
สามารถใช้สวิตช์อิเล็กทรอนิกส์หกตัวเพื่อขับเคลื่อนหกจังหวะเหล่านี้, ดังต่อไปนี้.
การตรวจจับตำแหน่ง
แม้ว่าเราจะรู้วิธีควบคุมโรเตอร์ทั้งหกครั้งแล้วก็ตาม.
แต่คุณได้พบปัญหาใหม่แล้ว: หากคุณไม่ทราบตำแหน่งของโรเตอร์, คุณจะรู้ได้อย่างไรว่าเมื่อใดควรขับคดเคี้ยวไหน?
เราจึงต้องรู้ตำแหน่งปัจจุบันของโรเตอร์!
และตำแหน่งของโรเตอร์จะตรวจจับได้ 2 วิธีทั่วไป.
1, วิธีการตรวจจับเซ็นเซอร์ฮอลล์.
รูปต่อไปนี้, ใส่สเตเตอร์ H1,H2,H3, เซ็นเซอร์ฮอลล์สามตัว, คุณสามารถทราบตำแหน่งที่แน่นอนในปัจจุบันของสเตเตอร์ได้.
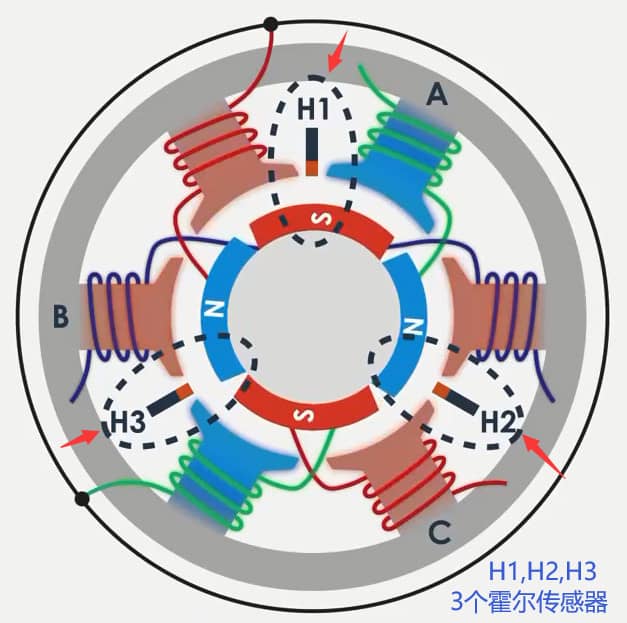
เอาต์พุตเซ็นเซอร์ฮอลล์พร้อมระดับสูงและต่ำเพื่อระบุ.

2, วิธีการตรวจจับแรงเคลื่อนไฟฟ้าย้อนกลับ
วิธีการตรวจจับ EMF ด้านหลังใช้หลักการเหนี่ยวนำแม่เหล็กไฟฟ้า.
เมื่อเกิดสนามแม่เหล็ก (สนามแม่เหล็ก) รอบการเปลี่ยนแปลงของขดลวดที่ไม่ได้รับพลังงาน, ศักย์ไฟฟ้าถูกเหนี่ยวนำให้เกิดในขดลวดนี้.
โดยการตรวจจับขนาดและทิศทางของศักย์ไฟฟ้านี้, เราสามารถรู้ตำแหน่งปัจจุบันของสเตเตอร์ได้ด้วย.

วิธีการตรวจจับทั้งสองวิธีนี้มีข้อดีและข้อเสียต่างกันไป.
การตรวจจับเซ็นเซอร์ Hall นั้นแม่นยำกว่าเล็กน้อย, แต่ยังมีราคาแพงกว่าอีกด้วย.
ในทางตรงกันข้าม, วิธีการตรวจจับแรงเคลื่อนไฟฟ้าแบบย้อนกลับจะประหยัดกว่า, แต่แม่นยำน้อยกว่าเล็กน้อย.
โรเตอร์ด้านในหรือโรเตอร์ด้านนอก
BLDC มีโครงสร้างสองประเภท: โรเตอร์ที่อยู่ด้านในเรียกว่าโรเตอร์ด้านใน BLDC; ในทางตรงกันข้าม, โรเตอร์ด้านนอกเรียกว่าโรเตอร์ด้านนอก BLDC.

พูดค่อนข้าง, โรเตอร์ BLDC ตัวนอกถูกใช้บ่อยกว่า.
สาเหตุหลักคือ BLDC ของโรเตอร์ด้านนอกมีความเสถียรมากกว่าในโครงสร้างทางกล. เนื่องจากโรเตอร์ของมอเตอร์มีแนวโน้มที่จะขยายตัวออกไปด้านนอกเนื่องจากแรงเหวี่ยงหนีศูนย์ภายใต้การทำงานที่ความเร็วสูง.
ดังนั้นโรเตอร์ด้านใน BLDC จึงต้องการความแม่นยำเชิงกลที่สูงมากเพื่อให้แน่ใจว่าโรเตอร์และสเตเตอร์จะไม่ต่อสู้กัน.
แต่หากระยะทางที่สงวนไว้นั้นไกลเกินไป, จะทำให้เกิดการรั่วไหลของแม่เหล็กและส่งผลต่อประสิทธิภาพโดยรวมของมอเตอร์.
แต่นี่ไม่ใช่ปัญหากับโรเตอร์ BLDC ตัวนอก, เนื่องจากโรเตอร์ด้านนอกไม่ได้รับผลกระทบจากการขยายตัวตามธรรมชาติ.
4、การประยุกต์ใช้ BLDC ในทางปฏิบัติ
ถ้าอย่างนั้นเรามาดูกันต่อไป, สถานการณ์การใช้งานจริงของ BLDC.
1, พัดลมระบายความร้อนแบบเงียบ การระบายความร้อนด้วยอากาศเป็นตัวเลือกแรกสำหรับการระบายความร้อนของอุปกรณ์ต่างๆ.
ตัวอย่างเช่น, หลักหลายอย่าง “เงียบ” แชสซีในตลาด, หากใช้ระบบระบายความร้อนด้วยอากาศ, พัดลมระบายความร้อนภายในนั้นโดยพื้นฐานแล้วใช้ BLDC.
ฐานที่ใช้กระจายความร้อนไปยังแล็ปท็อปก็ใช้ BLDC เช่นกัน, นอกเหนือจากระบบระบายความร้อนระบายอากาศขนาดใหญ่ภายในแล้ว, การใช้พัดลม BLDC. นอกจากนี้ยังมีเครื่องเป่าลมความเร็วสูงและสินค้าอื่นๆ.
2, โดรนหลายแกนใช้ใน BLDC ที่มีกำลังมากกว่า, ปรับให้เข้ากับ ESC ที่เหมาะสม (เอสซี), แล้วใช้ PWM ควบคุมความเร็ว BLDC ได้สะดวกมาก.

3, เครื่องมือไฟฟ้าและผลิตภัณฑ์อื่นๆ, เช่น แบตช์ไฟฟ้า, โดยทั่วไปการผลิตประแจไฟฟ้าในประเทศจะใช้ BLDC, และสว่านมือส่วนใหญ่เช่นกัน.
สาเหตุหลักมาจาก BLDC มีประสิทธิภาพสูง, และทำให้เครื่องมือไฟฟ้าที่ใช้พลังงานจากแบตเตอรี่มีอายุการใช้งานยาวนานขึ้น. อีกประเด็นหนึ่งคือแรงบิดเอาท์พุตของมอเตอร์ไร้แปรงถ่านมีความเสถียรมาก.
นอกจากนี้ยังมีคอมเพรสเซอร์ตู้เย็น, พัดลมระบายความร้อนช่องแช่แข็ง, ตลอดจนเครื่องฟอกอากาศ, เครื่องดูดฝุ่น/เครื่องกวาด, ปืนพังผืด, เป็นต้น, ซึ่งกำลังร้อนแรงมากในช่วงไม่กี่ปีที่ผ่านมา, ซึ่งส่วนใหญ่ขับเคลื่อนโดย BLDC.
