
Borstlös DC Motor-BLDC Basics — TMC4671-LA
När det kommer till borstlösa DC-motorer, det är nödvändigt att nämna borstmotorn. Borstmotorer har en ganska irriterande nackdel: det är “högljudd”.
Eftersom borstarna och kommuteringsringen behöver konstant friktion, för att driva armaturen.
Så, om du vill ha en “tyst fläkt”, du kan verkligen inte välja att använda borstmotorprodukter.
Och borstarna är mer benägna att skadas efter lång tid. När strömmen är hög, du kan till och med se borstarna spraka och gnistra när du byter riktning.
Ingen av dessa nackdelar finns i Borstlös DC Motor-BLDC som vi kommer att presentera nedan!
Vi kommer att introducera det borstlösa DC-motor-BLDC (BLDC för kort) från följande fyra aspekter.
1, Fördelarna och nackdelarna med BLDC.
2, Arbetsprincipen för BLDC.
3, Kontrollläget för BLDC.
4, Den faktiska användningen av BLDC.
1、Fördelar och nackdelar med BLDC
Borstlös DC-motor, bokstavligen, dess största egenskap är “borstlös”, vilket betyder inga borstar.
För det finns ingen borste, det är väldigt perfekt för att undvika de många bristerna i borstmotorn. Så i sin tur, dess främsta fördelar är.
1, långt liv; 2, kan vara tyst; 3, hög effektivitet (låg förlust); 4, mindre storlek; 5, hög stabilitet.
- 1. Borstlösa DC-motorer fungerar i ett brett spektrum av hastigheter, i vilken hastighet som helst, kan köras på full effekt.
- 2. Enastående överbelastningskapacitet och hög drifteffektivitet.
- 3. Borstlös DC-motor är mindre, bredare tillämpningsområde och högre effekttäthet jämfört med borstmotor.
- 4. Jämfört med drivstyrningen av asynkronmotor, körningen är enklare.
- 5. Borstlös DC-motor har ingen mekanisk kommutatorstruktur och är innesluten inuti, som kan undvika att flygande dammpartiklar kommer in i motorns insida och leder till olika problem och hög tillförlitlighet.
- 6. De yttre egenskaperna är bättre, drift med låg hastighet, kan avge stort vridmoment, kan ge ett relativt stort startmoment.
Nackdelar med BLDC
Låt oss gå tillbaka till frågan som ligger framför oss: vilka är nackdelarna med BLDC?
Jag tror att du redan har gissat: vi har spenderat så mycket utrymme för att prata om kontrollmetoden för BLDC, tillräckligt för att se svårigheten med dess kontroll, jämfört med borstmotorn, är mycket högre!
Så den största nackdelen med BLDC är dess höga kontrollsvårigheter och höga pris för att köra ESC (Elektronisk hastighetskontroll, ESC för kort).
Det har också en nackdel att BLDC på grund av det induktiva motståndet, starten kommer att åtföljas av jitter, till skillnad från borstmotorn start så smidig.
För närvarande, Det finns tre vanliga borstlösa motorstyrningsmetoder enligt följande.
1、Fyrkantsvågskontroll.
Även känd som trapetsvågkontroll, 120° kontroll, 6-stegkommuteringskontroll
Fyrkantvågskontrollmetoden har fördelen av enkla kontrollalgoritmer, låga hårdvarukostnader, användningen av ordinarie prestanda av kontroller kommer att kunna uppnå en hög motorhastighet.
Nackdelen är att vridmomentfluktuationen är stor, det finns en viss mängd strömbrus, och effektiviteten når inte maximalt. Fyrkantsvågskontroll är lämplig för applikationer som inte kräver hög motorrotationsprestanda.
Fyrkantsvågskontroll använder en Hall-sensor eller en sensorlös uppskattningsalgoritm för att erhålla positionen för motorrotorn, och utför sedan sex kommutationer (en var 60°) baserat på rotorns position inom en 360° elektrisk cykel.
Vid varje kommuteringsläge avger motorn en kraft i en specifik riktning, så det kan sägas att positionsnoggrannheten för fyrkantvågsstyrning är elektrisk 60°.
Eftersom motorns fasströmsvågform är nära fyrkantvåg på detta sätt att styra, det kallas fyrkantsvågskontroll.

2、Sinusvågskontroll.
Sinusvågskontrollmetoden använder SVPWM-vågen, och utgången är en 3-fas sinusvågsspänning, och motsvarande ström är också en sinusvågström.
Denna metod har inte konceptet med fyrkantsvågstyrningskommutering, eller tror att en elektrisk cykel i ett oändligt antal kommutering.
Självklart, jämfört med fyrkantsvågskontroll, sinusvågskontroll har mindre vridmomentfluktuationer och mindre strömövertoner, vilket gör att kontrollen känns mer “delikat”, men prestandakraven för kontroller är något högre än fyrkantvågskontroll, och motorns verkningsgrad kan inte maximeras.
3、foc kontroll

Även känd som vektorfrekvensomvandling, magnetfältsvektorriktningsstyrning
Sinusvågsstyrning realiserar styrningen av spänningsvektorn, indirekt realiserar kontrollen av nuvarande storlek, men kan inte styra strömriktningen.
FOC-styrmetoden kan betraktas som en uppgraderad version av sinusvågsstyrning, som realiserar kontrollen av strömvektor, dvs., vektorstyrningen av motorstatorfältet.
Eftersom statorfältets riktning styrs, statorfältet och rotorfältet kan hållas vid 90° hela tiden, och det maximala vridmomentet vid en viss ström kan uppnås.
Fördelarna med FOC-kontrollmetoden är: låg vridmomentfluktuation, hög effektivitet, lågt brus och snabb dynamisk respons.
Nackdelarna är: högre hårdvarukostnad, högre krav på styrenhetens prestanda, och motorparametrar måste matchas.
FOC är för närvarande det bästa valet för effektiv styrning av borstlösa DC-motorer (BLDC) och permanentmagnet synkronmotorer (PMSM).
FOC styr exakt magnituden och riktningen på magnetfältet, vilket gör motorns vridmoment jämnt, lågt ljud, hög effektivitet, och har en höghastighets dynamisk respons.
På grund av de uppenbara fördelarna med FOC, många företag ersätter nu gradvis kontrollen av traditionella produkter med FOC för många tillämpningar.
Tyskland Trinamic har ett servokontrollchip med magnetfältsvektorkontroll (FOC) — TMC4671-LA
– Vridmomentkontrollläge
– Hastighetskontrollläge
– Positionskontrollläge
– Aktuell kontrolluppdateringsfrekvens och maximal PWM-frekvens på 100KHz (uppdateringsfrekvens för hastighets- och positionskontroll kan konfigureras som en multipel av den aktuella uppdateringsfrekvensen)

TMC4671 är ett helt integrerat servokontrollchip som ger magnetfältsriktningsstyrning för borstlösa DC-motorer, permanentmagnet synkronmotorer, 2-fasstegmotorer, borstade DC-motorer och talspolemotorer.
Alla styrfunktioner är integrerade i hårdvaran. Med integrerade ADC:er, positionssensorgränssnitt, och positionsskillnad, denna fullfjädrade servokontroller är lämplig för en mängd olika servoapplikationer.
2、Arbetsprincipen för BLDC
BLDC är en sorts motor, så dess mest grundläggande sammansättning är oskiljbar från statorn och rotorn.
Statorn på en borstmotor är en permanentmagnet, medan dess rotor är en strömförsörjd spole (lindning). Som visas i figuren nedan.

Men för BLDC, det motsatta är sant!
Statorn (stator) av en BLDC är en spänningssatt spole, medan rotorn är en permanentmagnet!

Från “Maxwell-Amperes lag”, vi kan veta att utrymmet nära den aktiverade spolen kommer att generera ett magnetfält. Och riktningen för magnetfältsfördelningen, vi kan använda “högerregel” att härleda.
Faktiskt, detta är vad vi ofta kallar “elektromagnet”!
Sedan är nästa sak enkelt, vilka egenskaper har magneter?
Samma kön stöter bort varandra, det motsatta könet attraherar varandra!
Så, vi behöver bara ge spolen på statorn för att komma åt rätt riktning för strömmen, det är, så att de magnetiska polerna i elektromagnetens riktning.
Så, vi behöver bara ansluta spolen på statorn till rätt strömriktning, det är, låt riktningen för elektromagnetens magnetiska poler och riktningen för de magnetiska polerna hos permanentmagneten överensstämma exakt, att inte kunna stöta bort, eller attrahera rotorn för att göra roterande rörelser.
Optimering av statorn
Ovanstående körmetod, dvs. aktivera varje spole individuellt i sekvens, är genomförbart men för krångligt och ineffektivt.
Därför, den faktiska BLDC kommer att kombinera dessa sex spolar två och två och dela upp dem i tre lindningar, A, B, och C, som följer.

På så sätt kan vi driva två elektromagneter samtidigt, vilket omedelbart fördubblar effektiviteten.
Men det här är bara med magneten “attraktion” egenskaper, glöm inte att magneten också “repulsion” egenskaper.
Om vi kör en annan uppsättning spolar samtidigt, så att den tidigare uppsättningen spolar “locka till sig” rotorn när den andra uppsättningen spolar “slå tillbaka” rotorn, då får vår rotor en högre drivkraft!
Än så länge, denna modell har börjat närma sig den faktiska BLDC-produkten.
Men för ovanstående modell
dock, för ovanstående modell, vi måste förse två lindningar med två uppsättningar kraft i motsatta riktningar för att uppnå effekten av “attraktion” och “repulsion” på samma gång.
Detta är för komplicerat och kostsamt för praktiska tillämpningar.
Härnäst kommer vi att prata om “BLDC kontrollmetod”, vilket kommer att lösa ovanstående problem.
3、BLDC:s kontrollmetod
Den ursprungliga A, B, C tre lindningar är oberoende, så det är väldigt jobbigt att kontrollera dem.
Om vi sedan kopplar de tre lindningarna av A,B,C tillsammans och sätt ihop a “stjärnarrangemang”, vad blir resultatet?

Ursprungligen tre lindningar, leder till sex linjer; leder nu till att linjen reduceras till endast tre linjer, så hur man uppnår samma kontrolleffekt med sex linjer så sammankopplade?
Följande figur.
Den positiva sidan av strömförsörjningen är ansluten till det övre högra hörnet av A-lindningsingången, medan den negativa sidan av strömförsörjningen är ansluten till det nedre vänstra hörnet av B-lindningsutgången.
Denna gång drivs A-lindning och B-lindning samtidigt, och dess polaritet är precis motsatt, för att uppnå samma effekt när de tre lindningarna drivs oberoende av varandra!
Så genom att följa denna sekvens: AB-AC-BC-BA-CA-CB, de sex taktslagen, och cykla statorlindningarna i tur och ordning, rotorn kan fortsätta att rotera!
Sex elektroniska omkopplare kan användas för att driva dessa sex beats, som följer.
Positionsavkänning
Även om vi redan vet hur man kontrollerar rotorns sex slag.
Men har du hittat ett nytt problem: om du inte känner till rotorns position, hur vet man när man ska köra vilken lindning?
Så vi måste känna till rotorns nuvarande position!
Och rotorns position detekteras på två allmänna sätt.
1, Hallsensordetekteringsmetod.
Följande figur, sätt in statorn H1,H2,H3, tre Hall-sensorer, du kan veta den aktuella exakta positionen för statorn.
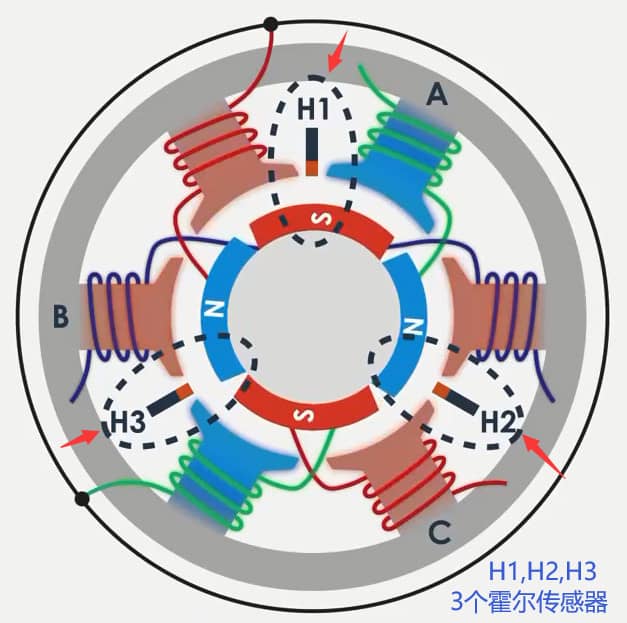
Hallsensorutgång med höga och låga nivåer för att indikera.

2, omvänd elektromotorisk kraftdetekteringsmetod
Tillbaka EMF-detektionsmetoden är baserad på principen om elektromagnetisk induktion.
När magnetfältet (magnetiskt flöde) runt en oenergiserad lindning förändras, en elektrisk potential induceras i denna lindning.
Genom att detektera storleken och riktningen för denna elektriska potential, vi kan också veta statorns nuvarande position.

Dessa två detektionsmetoder har sina fördelar och nackdelar.
Hallsensordetektering är lite mer exakt, men också dyrare.
Tvärtom, den omvända elektromotoriska kraftdetekteringsmetoden är mer ekonomisk, men något mindre exakt.
Innerrotor eller yttre rotor
BLDC har två typer av struktur: rotorn inuti kallas innerrotor BLDC; tvärtom, rotorn utanför kallas ytterrotor BLDC.

Relativt sett, den yttre rotorn BLDC används oftare.
Det främsta skälet är att den yttre rotorn BLDC är mer stabil i mekanisk struktur. Detta beror på att motorrotorn har en tendens att expandera utåt på grund av centrifugalkraften under höghastighetsdrift.
Så den inre rotorn BLDC behöver mycket hög mekanisk precision för att säkerställa att rotorn och statorn inte kommer att slåss.
Men om det reserverade avståndet är för långt, det kommer att leda till magnetiskt läckage och påverka motorns totala effektivitet.
Men detta är inget problem med den yttre rotorn BLDC, eftersom den yttre rotorn är naturligt opåverkad av expansion.
4、Den praktiska tillämpningen av BLDC
Låt oss sedan ta en titt på nästa, de faktiska tillämpningsscenarierna för BLDC.
1, tyst kylning fläkt luftkylning är förstahandsvalet för många enheter kylning.
Till exempel, många av de viktigaste “tyst” chassi på marknaden, om användningen av luftkylning, kylfläkten inuti är i princip användningen av BLDC.
Basen som används för att avleda värme till den bärbara datorn är också vanligt förekommande BLDC, förutom något stort ventilationskylsystem inuti, användningen av BLDC-fläktar. Det finns också höghastighetsluftfläkt och andra produkter.
2, Fleraxliga drönare används i BLDC med större effekt, anpassas till lämplig ESC (ESC), och sedan använda PWM för att styra BLDC-hastigheten är mycket bekvämt.

3, Elverktyg och andra produkter, såsom elektriska partier, inhemsk produktion av elektriska skiftnycklar används i princip BLDC, och det mesta av handborren också.
Främst på grund av den höga effektiviteten hos BLDC, och få de batteridrivna elverktygen att hålla längre. En annan sak är att vridmomentet för den borstlösa motorn är mycket stabil.
Det finns även kylkompressorer, frysfläktar, samt luftrenare, dammsugare/sopmaskiner, fascia vapen, etc., som har varit väldigt heta de senaste åren, de flesta drivs av BLDC.
