
Бесщеточный двигатель постоянного тока — основы BLDC — TMC4671-ЛА
Что касается бесколлекторных двигателей постоянного тока., необходимо упомянуть щеточный двигатель. Щеточные двигатели имеют довольно досадный недостаток: то есть “шумный”.
Потому что щеткам и коммутационному кольцу нужно постоянно трение, для питания якоря.
Так, если вы хотите “тихий вентилятор”, вы, конечно, не можете выбрать использование продуктов щеточного двигателя.
И щетки с большей вероятностью будут повреждены через долгое время.. Когда ток большой, можно даже увидеть, как щётки трещат и искрят при смене направления.
Ни один из этих недостатков не обнаружен в Бесщеточный двигатель постоянного тока-BLDC которые мы представим ниже!
Мы представим бесщеточный Двигатель постоянного тока-BLDC (БДК для краткости) из следующих четырех аспектов.
1, Преимущества и недостатки BLDC.
2, Принцип работы BLDC..
3, Режим управления BLDC.
4, Фактическое использование BLDC.
1、Преимущества и недостатки BLDC
Бесщеточный двигатель постоянного тока, буквально, его самая большая особенность “бесщеточный”, что значит без кистей.
Потому что нет кисти, это очень удобно, чтобы избежать нескольких недостатков щеточного двигателя. Итак, в свою очередь, его основные преимущества.
1, долгая жизнь; 2, можно молчать; 3, высокая эффективность (низкие потери); 4, Меньший размер; 5, высокая стабильность.
- 1. Бесщеточные двигатели постоянного тока работают в широком диапазоне скоростей., на любой скорости, можно запустить на полную мощность.
- 2. Выдающаяся перегрузочная способность и высокая эффективность работы.
- 3. Бесщеточный двигатель постоянного тока меньше, более широкий диапазон применения и более высокая удельная мощность по сравнению со щеточным двигателем.
- 4. По сравнению с управлением приводом асинхронного двигателя, привод более простой.
- 5. Бесщеточный двигатель постоянного тока не имеет конструкции механического коммутатора и заключен внутри., что может предотвратить попадание летящих частиц пыли внутрь двигателя и привести к различным проблемам и высокой надежности.
- 6. Внешние характеристики лучше, работа на низкой скорости, может выводить большой крутящий момент, может обеспечить относительно большой пусковой момент.
Недостатки BLDC
Вернемся к вопросу, оставленному впереди: каковы недостатки BLDC?
Я думаю, вы уже догадались: мы потратили так много места, чтобы рассказать о методе управления BLDC, достаточно, чтобы увидеть сложность его контроля, по сравнению с щеточным двигателем, намного выше!
Таким образом, самым большим недостатком BLDC является его высокая сложность управления и высокая стоимость управления ESC. (Электронный контроль скорости, ЭСК для краткости).
У него также есть недостаток, заключающийся в том, что BLDC из-за индуктивного сопротивления, запуск будет сопровождаться дрожанием, в отличие от щеточного мотора пуск такой плавный.
В настоящий момент, Существует три основных метода управления бесщеточным двигателем:.
1、Прямоугольное управление.
Также известен как управление трапециевидной волной., 120° контроль, 6-ступенчатое коммутационное управление
Преимущество метода управления прямоугольными импульсами заключается в простоте алгоритмов управления., низкие затраты на оборудование, использование обычного исполнения контроллер сможет получить высокую скорость двигателя.
Недостатком является то, что колебания крутящего момента велики., есть определенное количество текущего шума, и КПД не достигает максимума. Прямоугольное управление подходит для приложений, не требующих высокой скорости вращения двигателя..
В прямоугольном управлении используется датчик Холла или алгоритм бездатчиковой оценки для определения положения ротора двигателя., а затем выполняет шесть коммутаций (один каждые 60°) в зависимости от положения ротора в электрическом цикле 360°.
В каждом положении коммутации двигатель выдает усилие в определенном направлении., поэтому можно сказать, что точность позиционирования прямоугольного управления электрическая 60 °.
Поскольку форма волны фазного тока двигателя близка к прямоугольной при таком способе управления, это называется прямоугольным управлением.

2、Синусоидальное управление.
Метод управления синусоидой использует волну SVPWM., и выход представляет собой 3-фазное синусоидальное напряжение, и соответствующий ток также является синусоидальным током.
В этом методе отсутствует концепция управляющей коммутации прямоугольных импульсов., или думать, что электрический цикл в бесконечном числе коммутаций.
Очевидно, по сравнению с прямоугольным управлением, синусоидальное управление имеет меньше колебаний крутящего момента и меньше гармоник тока, что делает контроль более “нежный”, но требования к производительности контроллер немного выше, чем контроль прямоугольной волны, и КПД двигателя не может быть максимальным.
3、фок контроль

Также известен как векторное преобразование частоты., векторное управление направлением магнитного поля
Синусоидальное управление реализует управление вектором напряжения, косвенно реализует контроль текущего размера, но не может контролировать направление тока.
Метод управления ВОК можно рассматривать как модернизированную версию синусоидального управления., который реализует управление вектором тока, т.е., векторное управление полем статора двигателя.
Поскольку направление поля статора контролируется, поле статора и поле ротора можно постоянно поддерживать на уровне 90°, и максимальный выходной крутящий момент при определенном токе может быть достигнут.
Преимущества метода управления ВОК:: низкие колебания крутящего момента, высокая эффективность, низкий уровень шума и быстрый динамический отклик.
Недостатки: более высокая стоимость оборудования, повышенные требования к производительности контроллера, и параметры двигателя должны быть согласованы.
В настоящее время FOC является лучшим выбором для эффективного управления бесщеточными двигателями постоянного тока. (BLDC) и синхронные двигатели с постоянными магнитами (ПМСМ).
FOC точно контролирует величину и направление магнитного поля, что делает крутящий момент двигателя плавным, тихий шум, высокая эффективность, и имеет высокую скорость динамического отклика.
Благодаря очевидным преимуществам ВОК, многие компании в настоящее время постепенно заменяют управление традиционными продуктами на FOC для многочисленных приложений..
Германия Trinamic имеет микросхему управления сервоприводом с векторным управлением магнитным полем. (ВОК) — TMC4671-ЛА
– Режим управления крутящим моментом
– Режим контроля скорости
– Режим управления положением
– Текущая частота обновления управления и максимальная частота ШИМ 100 кГц (частота обновления для управления скоростью и положением может быть настроена как кратная текущей текущей частоте обновления)

TMC4671 — это полностью интегрированная микросхема управления сервоприводом, которая обеспечивает управление направлением магнитного поля для бесщеточных двигателей постоянного тока., синхронные двигатели с постоянными магнитами, 2-фазовые шаговые двигатели, коллекторные двигатели постоянного тока и двигатели со звуковой катушкой.
Все функции управления интегрированы в аппаратную часть. Со встроенными АЦП, интерфейс датчика положения, и позиционный дифференциал, этот полнофункциональный сервоконтроллер подходит для различных сервоприложений.
2、Принцип работы BLDC.
BLDC - это тип двигателя, поэтому его основной состав неотделим от статора и ротора..
Статор щеточного двигателя представляет собой постоянный магнит., в то время как его ротор представляет собой катушку под напряжением (обмотка). Как показано на рисунке ниже.

Но для BLDC, все наоборот!
статор (статор) BLDC представляет собой катушку под напряжением, в то время как ротор является постоянным магнитом!

От “Закон Максвелла-Ампера”, мы можем знать, что пространство рядом с катушкой под напряжением будет генерировать магнитное поле. И направление распространения магнитного поля, мы можем использовать “правило правой руки” вывести.
Фактически, это то, что мы часто называем “электромагнит”!
Тогда следующая вещь проста, каковы свойства магнитов?
Представители одного пола отталкивают друг друга, противоположный пол притягивает друг друга!
Так, нам просто нужно дать катушку на статоре, чтобы получить доступ к соответствующему направлению тока, то есть, чтобы магнитные полюса направления электромагнита.
Так, нам просто нужно подключить катушку на статоре к соответствующему направлению тока, то есть, пусть направление магнитных полюсов электромагнита и направление магнитных полюсов постоянного магнита точно совпадают, не иметь возможности отталкивать, или привлечь ротор, чтобы сделать вращательное движение.
Оптимизация статора
Вышеупомянутый метод вождения, то есть. подача питания на каждую катушку в отдельности в последовательности, возможно, но слишком громоздко и неэффективно.
Следовательно, фактический BLDC объединит эти шесть катушек по две и разделит их на три обмотки., А, Б, и С, следующее.

Таким образом, мы можем управлять двумя электромагнитами одновременно., что сразу удваивает эффективность.
Но это только с магнитом “Привлечение” характеристики, не забывайте, что магнит тоже “отвращение” характеристики.
Если мы одновременно управляем другим набором катушек, чтобы предыдущий набор катушек “привлекать” ротор, когда другой набор катушек “отталкивать” ротор, тогда наш ротор получит более высокую движущую силу!
До сих пор, эта модель начала приближаться к реальному продукту BLDC.
Но для вышеуказанной модели
Однако, для вышеуказанной модели, нам нужно поставить две обмотки с двумя наборами мощности в противоположных направлениях, чтобы добиться эффекта “Привлечение” а также “отвращение” в то же время.
Это слишком сложно и дорого для практического применения..
Далее мы поговорим о “Метод управления BLDC”, который решит вышеуказанную проблему.
3、Метод управления BLDC
Оригинал А, Б, C три обмотки независимы, поэтому очень хлопотно их контролировать.
Тогда, если мы соединим три обмотки A,Б,C вместе и собрать a “звездное расположение”, каков будет результат?

Изначально три обмотки, ведущие к шести линиям; теперь ведите к строке, сокращенной до трех строк, Итак, как добиться того же эффекта управления с шестью линиями, соединенными таким образом??
Следующий рисунок.
Положительная сторона источника питания подключена к правому верхнему углу входа обмотки А., в то время как отрицательная сторона источника питания подключена к нижнему левому углу вывода обмотки B.
На этот раз обмотка A и обмотка B управляются одновременно., и его полярность прямо противоположна, для достижения того же эффекта, когда три обмотки управляются независимо!
Таким образом, следуя этой последовательности: AB-AC-BC-BA-CA-CB, шесть ударов, и чередование обмоток статора, ротор может продолжать вращаться!
Для управления этими шестью ударами можно использовать шесть электронных переключателей., следующее.
Обнаружение положения
Хотя мы уже умеем управлять шестью ударами ротора.
Но вы нашли новую проблему: если вы не знаете положение ротора, как узнать когда какую обмотку гонять?
Итак, мы должны знать текущее положение ротора.!
И положение ротора определяется двумя основными способами..
1, Метод обнаружения датчика Холла.
Следующий рисунок, вставьте статор H1,H2,H3, три датчика Холла, вы можете узнать текущее точное положение статора.
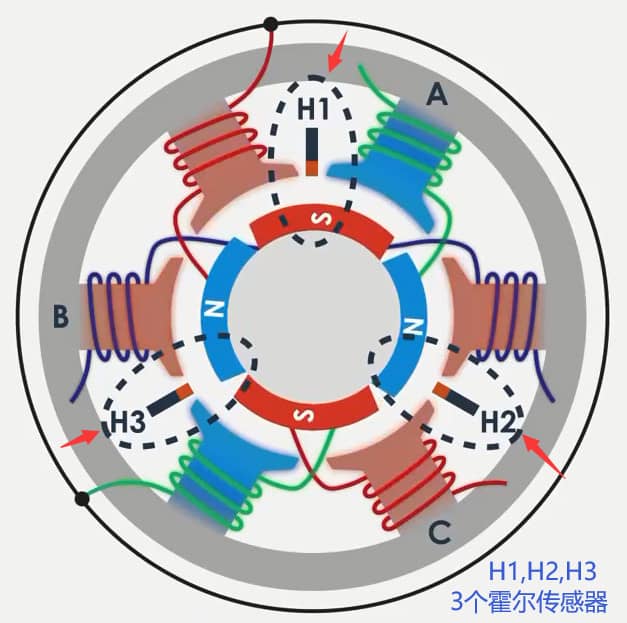
Выход датчика Холла с высоким и низким уровнями для индикации.

2, метод обнаружения обратной электродвижущей силы
Метод обнаружения обратной ЭДС основан на принципе электромагнитной индукции..
Когда магнитное поле (магнитный поток) вокруг обесточенной обмотки изменяется, в этой обмотке индуцируется электрический потенциал.
Обнаружив величину и направление этого электрического потенциала, мы также можем знать текущее положение статора.

Эти два метода обнаружения имеют свои преимущества и недостатки..
Обнаружение датчиком Холла немного точнее, но и дороже.
Напротив, метод обнаружения обратной ЭДС более экономичен, но чуть менее точно.
Внутренний ротор или внешний ротор
BLDC имеет два типа структуры: ротор внутри называется внутренним ротором BLDC; с другой стороны, ротор снаружи называется внешним ротором BLDC.

Условно говоря, внешний ротор BLDC используется чаще.
Основная причина заключается в том, что внешний ротор BLDC более стабилен по механической структуре.. Это связано с тем, что ротор двигателя имеет тенденцию расширяться наружу из-за центробежной силы при работе на высокой скорости..
Таким образом, внутренний ротор BLDC требует очень высокой механической точности, чтобы гарантировать, что ротор и статор не будут конфликтовать..
Но если зарезервированное расстояние слишком далеко, это приведет к магнитной утечке и повлияет на общую эффективность двигателя.
Но это не проблема с внешним ротором BLDC., потому что внешний ротор, естественно, не подвержен расширению.
4、Практическое применение BLDC
Тогда давайте посмотрим на следующий, реальные сценарии применения BLDC.
1, бесшумный охлаждающий вентилятор воздушное охлаждение является первым выбором для охлаждения многих устройств.
Например, многие из основных “тихий” шасси на рынке, если использовать воздушное охлаждение, охлаждающий вентилятор внутри в основном использует BLDC.
База, используемая для рассеивания тепла на ноутбуке, также обычно используется BLDC., помимо какой-то большой вентиляционной системы охлаждения внутри, использование вентиляторов BLDC. Есть также высокоскоростной воздуходувка и другие продукты.
2, Многоосные дроны используются в BLDC большей мощности, адаптированы к соответствующему ESC (ESC), а затем использовать PWM для управления скоростью BLDC очень удобно.

3, Электроинструменты и другая продукция, такие как электрические партии, электрогайковерты отечественного производства в основном б/у BLDC, и большая часть ручной дрели, а также.
В основном из-за высокой эффективности BLDC, и продлит срок службы электроинструментов с батарейным питанием. Еще один момент заключается в том, что выходной крутящий момент бесщеточного двигателя очень стабилен..
Есть также компрессоры для холодильников., вентиляторы охлаждения морозильной камеры, а также очистители воздуха, пылесосы/подметальные машины, фасция пушки, и т.п., которые очень популярны в последние годы, большинство из которых приводятся в действие BLDC.
