
O que são 5 tipos de motores de controle?
Como todos sabemos, o motor é uma parte importante do sistema de acionamento e controle. Com o desenvolvimento da ciência e tecnologia modernas, o foco do motor na aplicação prática começou a mudar do simples acionamento para o controle complexo; Especialmente o controle preciso da velocidade, posição e torque do motor. No entanto, os motores têm diferentes designs e modos de acionamento de acordo com diferentes aplicações.
À primeira vista, parece que a seleção do tipo é muito complexa. Portanto, para pessoas, a classificação básica é feita de acordo com a finalidade dos motores rotativos. Próximo, vamos fazer um “censo populacional” para a enorme família de motores, e gradualmente apresentar os mais representativos, motor mais comumente usado e básico no motor – motor de controle.
Motor de controle
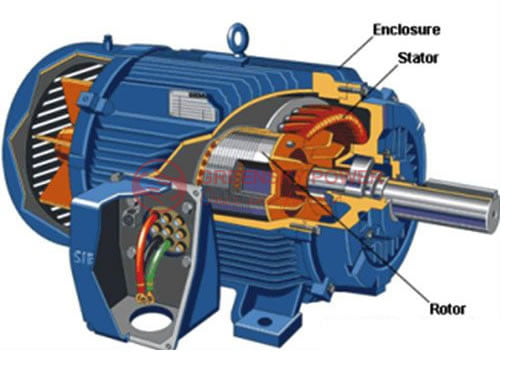
O motor de controle é usado principalmente para controle preciso de velocidade e posição, e é usado como “atuador” no sistema de controle. Pode ser dividido em servo motor, motor de passo, motor de torque, motor de relutância comutado, Motor CC sem escova, etc.

1. Servomotor
Servomotores são amplamente utilizados em vários sistemas de controle. Eles podem converter o sinal de tensão de entrada na saída mecânica no eixo do motor e arrastar os componentes controlados para atingir a finalidade de controle. Geralmente, o servo motor requer que a velocidade do motor seja controlada pelo sinal de tensão aplicado; A velocidade de rotação pode mudar continuamente com a mudança do sinal de tensão aplicado; O torque pode ser controlado pela saída de corrente do controlador; O motor deverá ter resposta rápida, pequeno volume e pequeno poder de controle. Os servo motores são usados principalmente em vários sistemas de controle de movimento, especialmente sistemas servo.
Existem servo motores DC e AC. O primeiro servo motor é um motor DC geral. No caso de baixa precisão de controle, o motor DC geral é usado como servo motor. Atualmente, com o rápido desenvolvimento da tecnologia de motores síncronos de ímã permanente, a maioria dos servomotores refere-se a servomotores síncronos de ímã permanente CA ou motores sem escova CC.

2. Motor de passo
O chamado motor de passo é um atuador que converte pulso elétrico em deslocamento angular; Mais geralmente, quando o driver de passo recebe um sinal de pulso, ele aciona o motor de passo para girar um ângulo fixo na direção definida. Podemos controlar o deslocamento angular do motor controlando o número de pulsos para atingir o objetivo de posicionamento preciso; Ao mesmo tempo, a velocidade e a aceleração do motor podem ser controladas controlando a frequência de pulso para atingir o objetivo de regulação de velocidade. Atualmente, os motores de passo comumente usados incluem motores de passo reativos (RV), motores de passo de ímã permanente (PM), motores de passo híbridos (HB) e motores de passo monofásicos.
A diferença entre o motor de passo e o motor comum é principalmente a forma de acionamento por pulso. É precisamente esta característica que o motor de passo pode ser combinado com a moderna tecnologia de controle digital. No entanto, o motor de passo não é tão bom quanto o servo motor DC de controle de malha fechada tradicional em termos de precisão de controle, faixa de variação de velocidade e desempenho em baixa velocidade;

Portanto, é usado principalmente em situações onde o requisito de precisão não é particularmente alto. Devido à sua estrutura simples, alta confiabilidade e baixo custo, motores de passo são amplamente utilizados em vários campos de prática de produção; Especialmente na área de fabricação de máquinas-ferramenta NC, porque o motor de passo não precisa de conversão A/D e pode converter diretamente o sinal de pulso digital em deslocamento angular, foi considerado o componente executivo mais ideal de máquinas-ferramenta NC.
Além da aplicação em máquinas-ferramenta CNC, motores de passo também podem ser usados em outras máquinas, como os motores em máquinas de alimentação automática, os motores em geral, unidades de disquete, e também em impressoras e plotters.
Além disso, o motor de passo também tem muitos defeitos; Por causa da frequência de partida sem carga do motor de passo, o motor de passo pode operar normalmente em baixa velocidade, mas não pode ser iniciado se a velocidade for superior a uma determinada velocidade, acompanhado por um grito agudo; A precisão dos drives de subdivisão de diferentes fabricantes pode variar muito, e quanto maior a subdivisão, mais difícil é controlar a precisão; Além disso, o motor de passo tem grande vibração e ruído quando gira em baixa velocidade.

3. motor de torque
O chamado motor de torque é um motor DC de ímã permanente multipolar plano. A armadura tem mais slots, peças de comutação e condutores em série para reduzir a ondulação de torque e a ondulação de velocidade. Existem dois tipos de motores de torque: Motor de torque CC e motor de torque CA.
Entre eles, a reatância auto-induzida do motor de torque DC é muito pequena, então sua resposta é muito boa; Seu torque de saída é proporcional à corrente de entrada e independente da velocidade e posição do rotor; Ele pode se conectar diretamente à carga e operar em baixa velocidade sem redução de engrenagem sob a condição de rotor próximo ao travado, para que possa produzir uma alta relação torque/inércia no eixo de carga e eliminar o erro do sistema causado pelo uso de engrenagem de redução.

O motor de torque CA pode ser dividido em síncrono e assíncrono. Atualmente, motor de torque assíncrono de gaiola de esquilo é comumente usado, que tem as características de baixa velocidade e grande torque. Geralmente, Os motores de torque CA são frequentemente usados na indústria têxtil. Seu princípio de funcionamento e estrutura são iguais aos dos motores assíncronos monofásicos. No entanto, devido à grande resistência do rotor de gaiola de esquilo, suas características mecânicas são relativamente suaves.

4. Motor de relutância comutado
Motor de relutância comutado (SRM) é um novo tipo de motor de regulação de velocidade com estrutura extremamente simples e sólida, baixo custo e excelente desempenho de regulação de velocidade. É um forte concorrente do motor de controle tradicional e tem forte potencial de mercado. Mas atualmente, também existem problemas como ondulação de torque, ruído de funcionamento e grande vibração, que precisam de algum tempo para otimizar e melhorar para se adaptar à aplicação real do mercado.
5. Motor CC sem escova
Motor CC sem escova (BLDCM) é desenvolvido com base em motor DC sem escova, mas sua corrente motriz é AC ao pé da letra; O motor DC sem escova pode ser dividido em motor de velocidade sem escova e motor de torque sem escova. Geralmente, existem dois tipos de corrente de acionamento do motor sem escova, uma é onda trapezoidal (geralmente “onda quadrada”), e o outro é onda senoidal. Às vezes, o primeiro é chamado de motor DC sem escova, e o último é chamado servo motor AC, que é exatamente um dos servo motores AC.
Para reduzir o momento de inércia, o motor DC sem escova geralmente adota um “delgado” estrutura. O motor DC sem escovas é muito menor em peso e volume do que o motor DC sem escovas, e o momento de inércia correspondente pode ser reduzido em cerca de 40-50%. Devido ao problema de processamento de materiais magnéticos permanentes, a capacidade geral do motor DC sem escova está abaixo de 100kW.
Este tipo de motor possui boa linearidade de características mecânicas e características de regulação, ampla faixa de velocidade, longa vida útil, manutenção conveniente e baixo ruído, e não possui uma série de problemas causados pela escova elétrica, por isso tem grande potencial de aplicação em sistema de controle.
Greensky Power Co., Ltd. é um fabricante profissional envolvido na pesquisa, desenvolvimento, Produção, venda de motores de controle.
Se você está procurando motor de controle para o seu projeto, entre em contato com nossa equipe de vendas.
