Qual motor para robô de reabilitação(robô com motor dc)?
robô de reabilitação(robô com motor dc) usar robótica de reabilitação pertence a um ramo do robô médico, devido à popularidade do 5G é amplamente utilizado na medicina, reabilitação e outras áreas; robô de reabilitação(robô com motor dc) nas juntas, dirigir, bandeja, caminhada e outros componentes amplamente utilizados micro motor DC de escova, motor DC sem escova, motor de passo, motor de copo oco, servo e outros micro motores, como o motor de acionamento. Geralmente, eles também são usados em conjunto com uma caixa de redução. A seguir, detalhamos os tipos de micromotores e parâmetros que serão usados em robôs de reabilitação.
Primeiro. Motoredutores CC
Categoria de Produto: Motorredutor CC
Modelo do produto:ZWMD008008-152-01
Especificação do produto: produto Φ8MM
Tensão:4.2V
Velocidade sem carga:15000-30000rpm
Corrente sem carga: <105 mA (Pode ser personalizado)
Taxa de redução de velocidade: 152:1 (Customizável)
Carga nominal:personalizado sob demanda

Segundo, motor de passo
Classificação de produto: Motorredutor de passo
Diâmetro externo: 6milímetros
Material: hardware
Direção de rotação: cw&ccw
Diferença de retorno da caixa de câmbio: ≤3°
Consequência: rolamento de óleo; rolamento
Excentricidade axial: ≤0,3mm (rolamento de óleo); ≤0,2mm (rolamento)
Carga radial do eixo de saída: ≤ 0,5N (rolamento de óleo); ≤ 5N (rolamento)
Temperatura de trabalho: -20……+85℃

Três, motor de copo oco
Classificação de produto: motorredutor de copo oco
Diâmetro externo: 24milímetros
Material: plástico
Direção de rotação: cw&ccw
Diferença de retorno da caixa de câmbio: ≤3° (Pode ser personalizado)
Consequência:Rolamento de óleo;rolamento
Excentricidade axial: ≤ 0,1 mm(rolamento de óleo);≤ 0,1 mm(rolamento)
Carga radial do eixo de saída:≤50N(rolamento de óleo);≤100N(rolamento)
Velocidade de entrada:≤15000rpm
Temperatura de operação:-20……+85℃

quatro, motor de escova DC
Classificação de produto: Motorredutor DC escovado
Diâmetro externo: 10milímetros
Material: hardware
Direção de rotação: cw&ccw
Diferença de retorno da caixa de câmbio: ≤3°
Consequência:rolamento de óleo;rolamento
Excentricidade axial: ≤0,3mm(rolamento de óleo);≤0,2mm(rolamento)
Carga radial do eixo de saída: ≤2N (rolamento de óleo); ≤7N (rolamento)
Temperatura de operação: -20 ……+85℃

V. Motor CC sem escova
Categoria de Produto: motor de engrenagem sem escova
especificações do produto:produtos Φ20MM
Tensão:12V
Corrente sem carga:220 mA (personalizável)
Velocidade de carga:2.4-1000 rpm (personalizável)
Taxa de redução de velocidade: 5/25/125/625:1 (Customizável)

Seis, servo não padrão personalizado
Nome do Produto: servo robô
Descrição do projeto Visando atender as necessidades de diversos tipos de juntas robóticas desenvolvidas pela alta tecnologia moderna, produzimos caixas de engrenagens para robôs com especificações que variam de 3,4MM a 45MM; a fim de resolver a precisão de design e fabricação da engrenagem servo e o controle da diferença de retorno do servo, otimizamos o design e a precisão de fabricação da engrenagem servo de acordo com nossos muitos anos de R&D e experiência em design combinada com a demanda do mercado de juntas robóticas para reduzir a diferença de retorno.
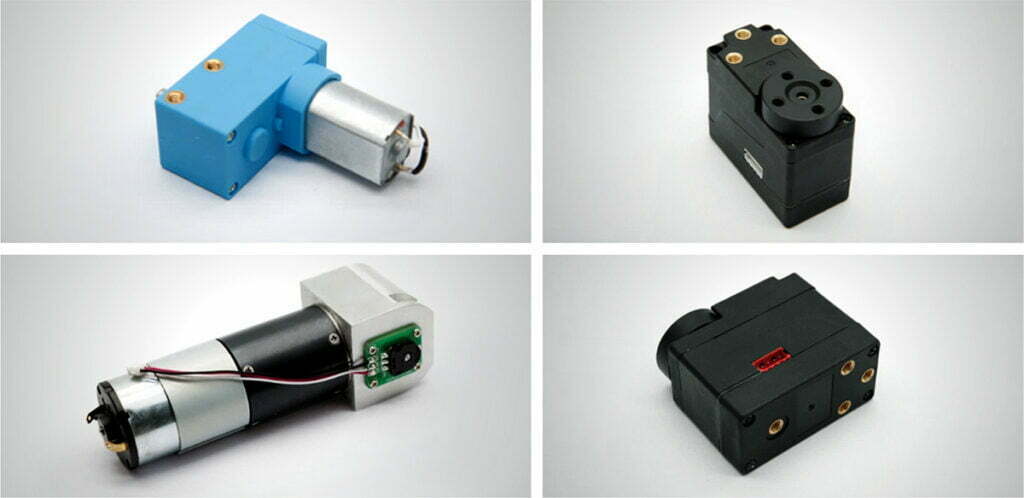
Diferentes partes no robô de reabilitação, usando diferentes motores de micro acionamento, servo, motores de acionamento personalizados não padronizados, geralmente aplicado no servo comum, rotação da unidade, interação de membros e outros módulos de acionamento.
