
Noções básicas do motor DC sem escovas-BLDC — TMC4671-LA
Quando se trata de motores DC sem escovas, é necessário mencionar o motor da escova. Os motores de escova têm uma desvantagem bastante irritante: aquilo é “barulhento”.
Porque as escovas e o anel de comutação precisam friccionar constantemente, para alimentar a armadura.
Então, se você quiser um “ventilador silencioso”, você certamente não pode escolher o uso de produtos de motor de escova.
E é mais provável que as escovas sejam danificadas depois de muito tempo. Quando a corrente é alta, você pode até ver as escovas estalando e brilhando ao mudar de direção.
Nenhuma dessas desvantagens é encontrada no Motor DC sem escova-BLDC que apresentaremos a seguir!
Apresentaremos o sem escova Motor DC-BLDC (BLDC para abreviar) dos seguintes quatro aspectos.
1, As vantagens e desvantagens do BLDC.
2, O princípio de funcionamento do BLDC.
3, O modo de controle do BLDC.
4, O uso real do BLDC.
1、Vantagens e desvantagens do BLDC
Motor CC sem escova, literalmente, sua maior característica é “sem escova”, o que significa que não há escovas.
Porque não há escova, é muito perfeito para evitar as diversas deficiências do motor da escova. Então, por sua vez, suas principais vantagens são.
1, vida longa; 2, pode ficar em silêncio; 3, alta eficiência (baixa perda); 4, tamanho menor; 5, alta estabilidade.
- 1. Os motores DC sem escova operam em uma ampla faixa de velocidades, em qualquer velocidade, pode funcionar com potência total.
- 2. Excelente capacidade de sobrecarga e alta eficiência operacional.
- 3. O motor DC sem escova é menor, ampla gama de aplicações e maior densidade de potência em comparação com o motor de escova.
- 4. Comparado com o controle de acionamento do motor assíncrono, a unidade é mais simples.
- 5. O motor DC sem escova não possui estrutura de comutador mecânico e é fechado dentro, o que pode evitar que partículas de poeira entrem no interior do motor e levem a vários problemas e alta confiabilidade.
- 6. As características externas são melhores, operação em baixa velocidade, pode produzir grande torque, pode fornecer um torque de partida relativamente grande.
Desvantagens do BLDC
Voltemos à pergunta deixada na frente: quais são as desvantagens do BLDC?
Eu acredito que você já adivinhou: gastamos muito espaço para falar sobre o método de controle do BLDC, o suficiente para ver a dificuldade de seu controle, em comparação com o motor da escova, é muito mais alto!
Portanto, a maior desvantagem do BLDC é sua alta dificuldade de controle e alto preço de condução do ESC (Controle Eletrônico de Velocidade, ESC para abreviar).
Também tem a desvantagem de o BLDC devido à resistência indutiva, a largada será acompanhada de jitter, ao contrário do motor da escova, comece tão suavemente.
Atualmente, existem três métodos convencionais de controle de motor sem escova, como segue.
1、Controle de onda quadrada.
Também conhecido como controle de onda trapezoidal, 120° controle, 6-controle de comutação passo a passo
O método de controle de onda quadrada tem a vantagem de algoritmos de controle simples, baixos custos de hardware, o uso do desempenho normal do controlador será capaz de obter uma alta velocidade do motor.
A desvantagem é que a flutuação do torque é grande, há uma certa quantidade de ruído atual, e a eficiência não atinge o máximo. O controle de onda quadrada é adequado para aplicações que não exigem alto desempenho de rotação do motor.
O controle de onda quadrada usa um sensor Hall ou um algoritmo de estimativa sem sensor para obter a posição do rotor do motor, e então realiza seis comutações (um a cada 60°) com base na posição do rotor dentro de um ciclo elétrico de 360°.
Em cada posição de comutação o motor emite uma força numa direção específica, então pode-se dizer que a precisão da posição do controle de onda quadrada é elétrica de 60 °.
Como a forma de onda da corrente de fase do motor é próxima da onda quadrada nesta forma de controle, é chamado de controle de onda quadrada.

2、controle de onda senoidal.
O método de controle de onda senoidal usa a onda SVPWM, e a saída é uma tensão de onda senoidal trifásica, e a corrente correspondente também é uma corrente de onda senoidal.
Este método não possui o conceito de comutação de controle de onda quadrada, ou pense que um ciclo elétrico em um número infinito de comutações.
Obviamente, comparado com controle de onda quadrada, o controle de onda senoidal tem menos flutuação de torque e menos harmônicos de corrente, o que faz com que o controle pareça mais “delicado”, mas os requisitos de desempenho do controlador são ligeiramente superiores ao controle de onda quadrada, e a eficiência do motor não pode ser maximizada.
3、Controle FOC

Também conhecido como conversão de frequência vetorial, controle direcional vetorial de campo magnético
O controle de onda senoidal realiza o controle do vetor de tensão, realiza indiretamente o controle do tamanho atual, mas não pode controlar a direção da corrente.
O método de controle FOC pode ser considerado uma versão atualizada do controle de onda senoidal, que realiza o controle do vetor atual, ou seja, o controle vetorial do campo do estator do motor.
Como a direção do campo do estator é controlada, o campo do estator e o campo do rotor podem ser mantidos em 90° o tempo todo, e a saída máxima de torque em uma determinada corrente pode ser alcançada.
As vantagens do método de controle FOC são: baixa flutuação de torque, alta eficiência, baixo ruído e resposta dinâmica rápida.
As desvantagens são: maior custo de hardware, requisitos mais elevados para desempenho do controlador, e os parâmetros do motor precisam ser combinados.
FOC é atualmente a melhor escolha para controle eficiente de motores CC sem escovas (BLDC) e motores síncronos de ímã permanente (PMSM).
FOC controla com precisão a magnitude e a direção do campo magnético, o que torna o torque do motor suave, barulho baixo, alta eficiência, e tem uma resposta dinâmica de alta velocidade.
Devido às vantagens óbvias do FOC, muitas empresas estão agora substituindo gradualmente o controle de produtos tradicionais por FOC para inúmeras aplicações.
Alemanha Trinamic possui um chip de servocontrole com controle vetorial de campo magnético (FOC) — TMC4671-LA
– Modo de controle de torque
– Modo de controle de velocidade
– Modo de controle de posição
– Frequência de atualização de controle atual e frequência PWM máxima de 100KHz (a frequência de atualização para controle de velocidade e posição pode ser configurada como um múltiplo da frequência de atualização atual)

O TMC4671 é um chip de servocontrole totalmente integrado que fornece controle direcional de campo magnético para motores CC sem escovas, motores síncronos de ímã permanente, 2-motores de passo de fase, motores DC escovados e motores de bobina de voz.
Todas as funções de controle estão integradas ao hardware. Com ADCs integrados, interface do sensor de posição, e diferencial de posição, este servo controlador completo é adequado para uma variedade de aplicações servo.
2、O princípio de funcionamento do BLDC
BLDC é uma espécie de motor, então sua composição mais básica é inseparável do estator e do rotor.
O estator de um motor com escova é um ímã permanente, enquanto seu rotor é uma bobina energizada (enrolamento). Como mostrado na figura abaixo.

Mas para o BLDC, O oposto é verdadeiro!
O estator (estator) de um BLDC é uma bobina energizada, enquanto o rotor é um ímã permanente!

De “Lei de Maxwell-Ampere”, podemos saber que o espaço próximo à bobina energizada irá gerar um campo magnético. E a direção da distribuição do campo magnético, podemos usar o “regra da mão direita” derivar.
Na verdade, isso é o que costumamos chamar “eletroímã”!
Então a próxima coisa é simples, quais são as propriedades dos ímãs?
O mesmo sexo se repele, o sexo oposto se atrai!
Então, só precisamos dar à bobina do estator acesso à direção apropriada da corrente, aquilo é, de modo que os pólos magnéticos da direção do eletroímã.
Então, só precisamos conectar a bobina do estator à direção apropriada da corrente, aquilo é, deixe a direção dos pólos magnéticos do eletroímã e a direção dos pólos magnéticos do ímã permanente corresponderem exatamente, não poder repelir, ou atrair o rotor para fazer movimento rotacional.
Otimização do estator
O método de condução acima, ou seja. energizando cada bobina individualmente em sequência, é viável, mas muito complicado e ineficiente.
Portanto, o BLDC real combinará essas seis bobinas duas por duas e as dividirá em três enrolamentos, UMA, B, e C, do seguinte modo.

Desta forma podemos acionar dois eletroímãs ao mesmo tempo, o que duplica imediatamente a eficiência.
Mas isso é só com o ímã “atração” características, não esqueça que o ímã também “repulsão” características.
Se acionarmos outro conjunto de bobinas ao mesmo tempo, de modo que o conjunto anterior de bobinas “atrai” o rotor quando o outro conjunto de bobinas “repelir” o rotor, então nosso rotor terá uma força motriz maior!
Até aqui, este modelo começou a se aproximar do produto BLDC real.
Mas para o modelo acima
No entanto, para o modelo acima, precisamos fornecer dois enrolamentos com dois conjuntos de energia em direções opostas para obter o efeito de “atração” e “repulsão” ao mesmo tempo.
Isto é muito complicado e caro para aplicações práticas.
A seguir falaremos sobre o “Método de controle BLDC”, que resolverá o problema acima.
3、Método de controle do BLDC
O original A, B, C três enrolamentos são independentes, então é muito problemático controlá-los.
Então, se conectarmos os três enrolamentos de A,B,C juntos e montar um “arranjo de estrelas”, Qual será o resultado?

Originalmente três enrolamentos, levando a seis linhas; agora levam à linha reduzida a apenas três linhas, então, como conseguir o mesmo efeito de controle com seis linhas tão conectadas?
A figura a seguir.
O lado positivo da fonte de alimentação está conectado ao canto superior direito da entrada do enrolamento A, enquanto o lado negativo da fonte de alimentação está conectado ao canto inferior esquerdo da saída do enrolamento B.
Desta vez, o enrolamento A e o enrolamento B são acionados ao mesmo tempo, e sua polaridade é exatamente oposta, para obter o mesmo efeito quando os três enrolamentos são acionados de forma independente!
Então, seguindo esta sequência: AB-AC-BC-BA-CA-CB, as seis batidas, e alternando os enrolamentos do estator por sua vez, o rotor pode continuar girando!
Seis interruptores eletrônicos podem ser usados para acionar essas seis batidas, do seguinte modo.
Detecção de posição
Embora já saibamos controlar as seis batidas do rotor.
Mas você encontrou um novo problema: se você não sabe a posição do rotor, como você sabe quando dirigir qual enrolamento?
Então temos que saber a posição atual do rotor!
E a posição do rotor é detectada de duas maneiras gerais.
1, Método de detecção do sensor Hall.
A figura a seguir, coloque o estator H1,H2,H3, três sensores Hall, você pode saber a posição exata atual do estator.
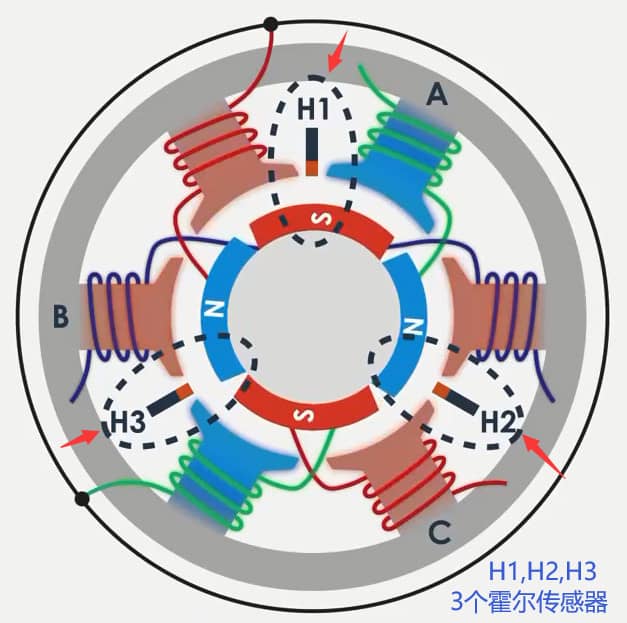
Saída do sensor Hall com níveis alto e baixo para indicar.

2, método de detecção de força eletromotriz reversa
O método de detecção de Back EMF é baseado no princípio da indução eletromagnética.
Quando o campo magnético (fluxo magnético) em torno de um enrolamento não energizado muda, um potencial elétrico é induzido neste enrolamento.
Ao detectar a magnitude e a direção deste potencial elétrico, também podemos saber a posição atual do estator.

Esses dois métodos de detecção têm suas vantagens e desvantagens.
A detecção do sensor Hall é um pouco mais precisa, mas também mais caro.
Pelo contrário, o método de detecção de força eletromotriz reversa é mais econômico, mas um pouco menos preciso.
Rotor interno ou rotor externo
BLDC possui dois tipos de estrutura: o rotor interno é chamado de rotor interno BLDC; pelo contrário, o rotor externo é chamado de rotor externo BLDC.

Relativamente falando, o rotor externo BLDC é usado com mais frequência.
A principal razão é que o rotor externo BLDC é mais estável na estrutura mecânica. Isso ocorre porque o rotor do motor tem tendência a se expandir para fora devido à força centrífuga sob operação em alta velocidade..
Portanto, o rotor interno BLDC precisa de uma precisão mecânica muito alta para garantir que o rotor e o estator não briguem.
Mas se a distância reservada for muito grande, isso levará a vazamento magnético e afetará a eficiência geral do motor.
Mas isso não é um problema com o rotor externo BLDC, porque o rotor externo não é naturalmente afetado pela expansão.
4、A aplicação prática do BLDC
Então vamos dar uma olhada no próximo, os cenários reais de aplicação do BLDC.
1, ventilador de resfriamento silencioso, resfriamento de ar é a primeira escolha para resfriamento de muitos dispositivos.
Por exemplo, muitos dos principais “silencioso” chassis no mercado, se o uso de resfriamento de ar, o ventilador de resfriamento interno é basicamente o uso de BLDC.
A base usada para dissipar o calor para o laptop também é comumente usada BLDC, além de algum grande sistema de resfriamento de ventilação dentro, o uso de ventiladores BLDC. Existem também sopradores de ar de alta velocidade e outros produtos.
2, Drones multieixos são usados em BLDC de maior potência, adaptado ao ESC apropriado (ESC), e então usar PWM para controlar a velocidade BLDC é muito conveniente.

3, Ferramentas elétricas e outros produtos, como lotes elétricos, a produção nacional de chaves elétricas é basicamente usada BLDC, e a maior parte da furadeira manual também.
Principalmente por causa da alta eficiência do BLDC, e fazer com que as ferramentas elétricas alimentadas por bateria durem mais. Outro ponto é que a saída de torque do motor sem escova é muito estável.
Existem também compressores de geladeira, ventiladores de resfriamento de freezer, bem como purificadores de ar, aspiradores/vassouras, armas de fáscia, etc., que estão muito quentes nos últimos anos, a maioria dos quais são conduzidos por BLDC.
