
Borstelloze gelijkstroommotor - BLDC-basisprincipes — TMC4671-LA
Als het gaat om borstelloze gelijkstroommotoren, het is noodzakelijk om de borstelmotor te vermelden. Borstelmotoren hebben een nogal vervelend nadeel: dat is “luidruchtig”.
Omdat de borstels en de commutatiering voortdurend wrijving nodig hebben, om het anker van stroom te voorzien.
Dus, als je een wilt “stille ventilator”, je kunt zeker niet kiezen voor het gebruik van borstelmotorproducten.
En de borstels raken na lange tijd sneller beschadigd. Wanneer de stroom hoog is, je kunt zelfs de borstels zien knetteren en vonken wanneer je van richting verandert.
Geen van deze nadelen zijn te vinden in de Borstelloze DC-motor-BLDC die we hieronder zullen introduceren!
We zullen de borstelloze introduceren DC-motor-BLDC (kortweg BLDC) uit de volgende vier aspecten.
1, De voor- en nadelen van BLDC.
2, Het werkingsprincipe van BLDC.
3, De besturingsmodus van BLDC.
4, Het daadwerkelijke gebruik van BLDC.
1、Voor- en nadelen van BLDC
Borstelloze gelijkstroommotor, letterlijk, het grootste kenmerk is “borstelloos”, wat betekent dat er geen borstels zijn.
Omdat er geen borstel is, het is zeer perfect om de verschillende tekortkomingen van de borstelmotor te vermijden. Dus op zijn beurt, de belangrijkste voordelen zijn.
1, lang leven; 2, kan stil zijn; 3, hoge efficiëntie (laag verlies); 4, kleinere maat; 5, hoge stabiliteit.
- 1. Borstelloze gelijkstroommotoren werken in een breed toerentalbereik, op welke snelheid dan ook, kan op volle kracht draaien.
- 2. Uitstekende overbelastingscapaciteit en hoog bedrijfsrendement.
- 3. Borstelloze gelijkstroommotor is kleiner, breder toepassingsbereik en hogere vermogensdichtheid vergeleken met borstelmotor.
- 4. Vergeleken met de aandrijfbesturing van een asynchrone motor, de rit is eenvoudiger.
- 5. Borstelloze gelijkstroommotor heeft geen mechanische commutatorstructuur en is van binnen ingesloten, waardoor kan worden voorkomen dat vliegende stofdeeltjes de binnenkant van de motor binnendringen, wat tot verschillende problemen en hoge betrouwbaarheid kan leiden.
- 6. De uiterlijke kenmerken zijn beter, werking op lage snelheid, kan een groot koppel leveren, kan een relatief groot startkoppel leveren.
Nadelen van BLDC
Laten we teruggaan naar de vraag die vooraan staat: wat zijn de nadelen van BLDC?
Ik geloof dat je het al geraden hebt: we hebben zoveel ruimte besteed aan het praten over de controlemethode van BLDC, genoeg om de moeilijkheid van de controle ervan te zien, vergeleken met de borstelmotor, ligt een stuk hoger!
Het grootste nadeel van BLDC is dus de hoge besturingsmoeilijkheid en de hoge prijs voor het besturen van ESC (Elektronische snelheidsregeling, ESC in het kort).
Het heeft ook een nadeel dat de BLDC vanwege de inductieve weerstand, de start zal gepaard gaan met jitter, in tegenstelling tot de borstelmotor start hij zo soepel.
Momenteel, Er zijn de volgende drie reguliere borstelloze motorbesturingsmethoden.
1、Blokgolfcontrole.
Ook bekend als trapeziumvormige golfbeheersing, 120° controle, 6-stap commutatie controle
De blokgolfbesturingsmethode heeft het voordeel van eenvoudige besturingsalgoritmen, lage hardwarekosten, het gebruik van de gewone uitvoering van de controleur zal een hoog motortoerental kunnen bereiken.
Het nadeel is dat de koppelfluctuatie groot is, er is een bepaalde hoeveelheid stroomruis, en de efficiëntie bereikt niet het maximum. Blokgolfbesturing is geschikt voor toepassingen die geen hoge motorrotatieprestaties vereisen.
Blokgolfregeling maakt gebruik van een Hall-sensor of een sensorloos schattingsalgoritme om de positie van de motorrotor te bepalen, en voert vervolgens zes commutaties uit (één elke 60°) gebaseerd op de rotorpositie binnen een elektrische cyclus van 360°.
Bij elke commutatiepositie oefent de motor een kracht uit in een specifieke richting, er kan dus worden gezegd dat de positienauwkeurigheid van blokgolfbesturing elektrisch 60 ° is.
Omdat de fasestroomgolfvorm van de motor bij deze manier van regelen dicht bij de blokgolf ligt, het wordt blokgolfcontrole genoemd.

2、Sinusgolfregeling.
De sinusgolfbesturingsmethode maakt gebruik van de SVPWM-golf, en de uitgang is een driefasige sinusspanning, en de overeenkomstige stroom is ook een sinusgolfstroom.
Deze methode kent niet het concept van blokgolfbesturingscommutatie, of denk dat een elektrische cyclus een oneindig aantal commutaties heeft.
Blijkbaar, vergeleken met blokgolfcontrole, sinusgolfregeling heeft minder koppelfluctuaties en minder stroomharmonischen, waardoor de controle meer voelt “delicaat”, maar de prestatie-eisen van de controleur zijn iets hoger dan de blokgolfcontrole, en de efficiëntie van de motor kan niet worden gemaximaliseerd.
3、FOC-controle

Ook bekend als vectorfrequentieconversie, magnetische veld vector directionele controle
Sinusgolfbesturing realiseert de controle van de spanningsvector, realiseert indirect de controle over de huidige omvang, maar kan de richting van de stroom niet controleren.
De FOC-controlemethode kan worden beschouwd als een verbeterde versie van sinusgolfcontrole, die de controle van de huidige vector realiseert, d.w.z., de vectorbesturing van het motorstatorveld.
Omdat de richting van het statorveld wordt geregeld, het statorveld en het rotorveld kunnen te allen tijde op 90° gehouden worden, en de maximale koppeloutput bij een bepaalde stroom kan worden bereikt.
De voordelen van de FOC-controlemethode zijn:: lage koppelschommelingen, hoge efficiëntie, laag geluidsniveau en snelle dynamische respons.
De nadelen zijn: hogere hardwarekosten, hogere eisen aan controllerprestaties, en motorparameters moeten op elkaar worden afgestemd.
FOC is momenteel de beste keuze voor efficiënte besturing van borstelloze gelijkstroommotoren (BLDC) en synchrone motoren met permanente magneet (PMSM).
FOC regelt nauwkeurig de grootte en richting van het magnetische veld, waardoor het motorkoppel soepel verloopt, laag geluidsniveau, hoge efficiëntie, en heeft een dynamische respons op hoge snelheid.
Vanwege de duidelijke voordelen van FOC, veel bedrijven vervangen nu geleidelijk de controle over traditionele producten door FOC voor tal van toepassingen.
Duitsland Trinamic heeft een servobesturingschip met magnetische veldvectorbesturing (FOC) — TMC4671-LA
– Koppelregelingsmodus
– Snelheidsregelmodus
– Positiecontrolemodus
– Huidige controle-vernieuwingsfrequentie en maximale PWM-frequentie van 100 kHz (verversingsfrequentie voor snelheids- en positieregeling kan worden geconfigureerd als een veelvoud van de huidige huidige verversingsfrequentie)

De TMC4671 is een volledig geïntegreerde servobesturingschip die magnetische veldrichtingscontrole biedt voor borstelloze gelijkstroommotoren, synchrone motoren met permanente magneet, 2-fase stappenmotoren, geborstelde gelijkstroommotoren en spreekspoelmotoren.
Alle besturingsfuncties zijn geïntegreerd in de hardware. Met geïntegreerde ADC's, positiesensor-interface, en positieverschil, deze volledig uitgeruste servocontroller is geschikt voor een verscheidenheid aan servotoepassingen.
2、Het werkingsprincipe van BLDC
BLDC is een soort motor, dus de meest basale samenstelling ervan is onlosmakelijk verbonden met de stator en de rotor.
De stator van een borstelmotor is een permanente magneet, terwijl de rotor een bekrachtigde spoel is (kronkelend). Zoals weergegeven in de onderstaande afbeelding.

Maar voor de BLDC, het tegenovergestelde is waar!
De stator (stator) van een BLDC is een bekrachtigde spoel, terwijl de rotor een permanente magneet is!

Van “De wet van Maxwell-Ampere”, we kunnen weten dat de ruimte nabij de bekrachtigde spoel een magnetisch veld zal genereren. En de richting van de magnetische veldverdeling, wij kunnen de gebruiken “rechterhand regel” afleiden.
In werkelijkheid, dit is wat wij vaak noemen “elektromagneet”!
Dan is het volgende eenvoudig, wat zijn de eigenschappen van magneten?
Hetzelfde geslacht stoot elkaar af, het andere geslacht trekt elkaar aan!
Dus, we hoeven alleen maar de spoel op de stator te geven om toegang te krijgen tot de juiste richting van de stroom, dat is, zodat de magnetische polen van de elektromagneet richting geven.
Dus, we hoeven alleen maar de spoel op de stator op de juiste stroomrichting aan te sluiten, dat is, laat de richting van de magnetische polen van de elektromagneet en de richting van de magnetische polen van de permanente magneet exact overeenkomen, niet te kunnen afweren, of trek de rotor aan om een roterende beweging uit te voeren.
Optimalisatie van de stator
De bovenstaande rijmethode, d.w.z. waarbij elke spoel afzonderlijk achtereenvolgens wordt bekrachtigd, is haalbaar, maar te omslachtig en inefficiënt.
Daarom, de feitelijke BLDC zal die zes spoelen twee aan twee combineren en ze in drie wikkelingen verdelen, A, B, en C, als volgt.

Zo kunnen we tegelijkertijd twee elektromagneten aandrijven, wat de efficiëntie onmiddellijk verdubbelt.
Maar dit is alleen met de magneet “attractie” kenmerken, vergeet niet dat de magneet ook “afstoting” kenmerken.
Als we tegelijkertijd een ander stel spoelen aandrijven, zodat de vorige set spoelen “aantrekken” de rotor wanneer de andere set spoelen draait “afstoten” de rotor, dan krijgt onze rotor een hogere aandrijfkracht!
Dusver, dit model begint het daadwerkelijke BLDC-product te benaderen.
Maar voor het bovenstaande model
Echter, voor bovenstaand model, we moeten twee wikkelingen voorzien van twee sets kracht in tegengestelde richtingen om het effect te bereiken “attractie” En “afstoting” tegelijkertijd.
Dit is te ingewikkeld en te duur voor praktische toepassingen.
Vervolgens zullen we het hebben over de “BLDC-controlemethode”, wat het bovenstaande probleem oplost.
3、De controlemethode van BLDC
De originele A, B, C drie wikkelingen zijn onafhankelijk, het is dus erg lastig om ze onder controle te houden.
Als we dan de drie wikkelingen van A,B,C samen en samen een “sterren arrangement”, wat zal het resultaat zijn?

Oorspronkelijk drie wikkelingen, wat leidt tot zes regels; nu leiden tot de lijn teruggebracht tot slechts drie lijnen, dus hoe je hetzelfde besturingseffect kunt bereiken met zes aldus verbonden lijnen?
De volgende figuur.
De positieve kant van de voeding is verbonden met de rechterbovenhoek van de A-wikkelingang, terwijl de negatieve kant van de voeding is aangesloten op de linkeronderhoek van de B-wikkeluitgang.
Dit keer worden A-wikkeling en B-wikkeling tegelijkertijd aangedreven, en de polariteit is precies het tegenovergestelde, om hetzelfde effect te bereiken wanneer de drie wikkelingen onafhankelijk worden aangedreven!
Dus door deze volgorde te volgen: AB-AC-BC-BA-CA-CB, de zes tellen, en het beurtelings laten draaien van de statorwikkelingen, de rotor kan blijven draaien!
Er kunnen zes elektronische schakelaars worden gebruikt om deze zes beats aan te sturen, als volgt.
Positie detectie
Hoewel we al weten hoe we de zes slagen van de rotor moeten besturen.
Maar heb je een nieuw probleem gevonden?: als u de positie van de rotor niet kent, hoe weet je wanneer je welke bocht moet rijden??
We moeten dus de huidige positie van de rotor weten!
En de positie van de rotor wordt op twee algemene manieren gedetecteerd.
1, Detectiemethode van de Hall-sensor.
De volgende figuur, plaats de stator H1,H2,H3, drie Hall-sensoren, u kunt de huidige exacte positie van de stator kennen.
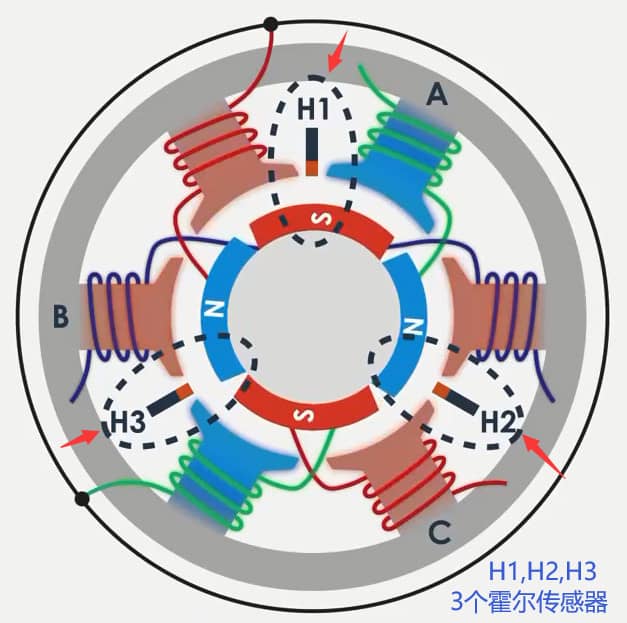
Hall-sensoruitgang met hoge en lage niveaus om aan te geven.

2, detectiemethode voor omgekeerde elektromotorische kracht
De terug-EMF-detectiemethode is gebaseerd op het principe van elektromagnetische inductie.
Wanneer het magnetische veld (magnetische flux) rond een niet-bekrachtigde wikkelingsverandering, In deze wikkeling wordt een elektrische potentiaal geïnduceerd.
Door de grootte en richting van dit elektrische potentieel te detecteren, we kunnen ook de huidige positie van de stator kennen.

Deze twee detectiemethoden hebben hun voor- en nadelen.
Hall-sensordetectie is iets nauwkeuriger, maar ook duurder.
Integendeel, de detectiemethode voor omgekeerde elektromotorische kracht is economischer, maar iets minder nauwkeurig.
Binnenrotor of buitenrotor
BLDC heeft twee soorten structuren: de rotor binnenin wordt binnenrotor BLDC genoemd; Integendeel, de buitenrotor wordt buitenrotor BLDC genoemd.

Relatief gezien, de buitenste rotor BLDC wordt vaker gebruikt.
De belangrijkste reden is dat de buitenste rotor BLDC stabieler is qua mechanische structuur. Dit komt omdat de motorrotor de neiging heeft om naar buiten uit te zetten als gevolg van de centrifugaalkracht bij bedrijf met hoge snelheid.
De binnenrotor BLDC heeft dus een zeer hoge mechanische precisie nodig om ervoor te zorgen dat de rotor en de stator niet met elkaar in gevecht gaan.
Maar als de gereserveerde afstand te ver is, het zal leiden tot magnetische lekkage en de algehele efficiëntie van de motor beïnvloeden.
Maar dit is geen probleem met de buitenste rotor BLDC, omdat de buitenrotor van nature niet wordt beïnvloed door uitzetting.
4、De praktische toepassing van BLDC
Laten we dan eens naar het volgende kijken, de daadwerkelijke toepassingsscenario’s van BLDC.
1, stille koelventilator luchtkoeling is de eerste keuze voor veel apparaatkoeling.
Bijvoorbeeld, veel van de belangrijkste “stil” onderstel op de markt, als het gebruik van luchtkoeling, de koelventilator binnenin is eigenlijk het gebruik van BLDC.
De basis die wordt gebruikt om de warmte naar de laptop af te voeren, wordt ook vaak gebruikt BLDC, naast een groot ventilatiekoelsysteem binnenin, het gebruik van BLDC-ventilatoren. Er zijn ook hogesnelheidsluchtblazers en andere producten.
2, Meerassige drones worden gebruikt in BLDC met een groter vermogen, aangepast aan de juiste ESC (ESC), en vervolgens PWM gebruiken om de BLDC-snelheid te regelen is erg handig.

3, Elektrisch gereedschap en andere producten, zoals elektrische batches, binnenlandse productie van elektrische sleutels worden in principe BLDC gebruikt, en het grootste deel van de handboor ook.
Vooral vanwege het hoge rendement van BLDC, en ervoor zorgen dat elektrisch gereedschap op batterijen langer meegaat. Een ander punt is dat het koppel van een borstelloze motor zeer stabiel is.
Er zijn ook koelcompressoren, koelventilatoren voor vriezers, evenals luchtreinigers, stofzuigers/veegmachines, fascia geweren, enz., die de laatste jaren erg heet zijn, waarvan de meeste worden aangestuurd door BLDC.
