
Asas Motor DC Tanpa Berus-BLDC — TMC4671-LA
Apabila ia datang kepada motor DC tanpa berus, adalah perlu untuk menyebut motor berus. Motor berus mempunyai kelemahan yang agak menjengkelkan: itu dia “bising”.
Kerana berus dan gelang tukar ganti perlu sentiasa geseran, untuk menggerakkan angker.
Jadi, jika anda mahu a “kipas senyap”, anda pastinya tidak boleh memilih penggunaan produk motor berus.
Dan berus lebih cenderung untuk rosak selepas masa yang lama. Apabila arus tinggi, anda juga boleh melihat berus berderak dan berkilau apabila menukar arah.
Tiada satu pun kelemahan ini ditemui dalam Motor DC tanpa berus-BLDC yang akan kami perkenalkan di bawah!
Kami akan memperkenalkan brushless Motor DC-BLDC (Pendek kata BLDC) daripada empat aspek berikut.
1, Kelebihan dan kekurangan BLDC.
2, Prinsip kerja BLDC.
3, Mod kawalan BLDC.
4, Penggunaan sebenar BLDC.
1、Kelebihan dan kekurangan BLDC
Motor DC tanpa berus, secara literal, ciri terbesarnya ialah “tanpa berus”, yang bermaksud tiada berus.
Sebab tak ada berus, ia sangat sempurna untuk mengelakkan beberapa kelemahan motor berus. Jadi mengikut giliran, kelebihan utamanya ialah.
1, panjang umur; 2, boleh senyap; 3, kecekapan tinggi (kerugian rendah); 4, saiz yang lebih kecil; 5, kestabilan yang tinggi.
- 1. Motor DC tanpa berus beroperasi dalam pelbagai kelajuan, pada sebarang kelajuan, boleh dijalankan dengan kuasa penuh.
- 2. Kapasiti beban lampau yang luar biasa dan kecekapan operasi yang tinggi.
- 3. Motor DC tanpa berus adalah lebih kecil, julat aplikasi yang lebih luas dan ketumpatan kuasa yang lebih tinggi berbanding motor berus.
- 4. Berbanding dengan kawalan pemacu motor tak segerak, pemacu lebih mudah.
- 5. Motor DC tanpa berus tidak mempunyai struktur komutator mekanikal dan disertakan di dalamnya, yang boleh mengelakkan zarah habuk berterbangan daripada memasuki bahagian dalam motor dan membawa kepada pelbagai masalah dan kebolehpercayaan yang tinggi.
- 6. Ciri-ciri luaran adalah lebih baik, operasi kelajuan rendah, boleh mengeluarkan tork yang besar, boleh memberikan tork permulaan yang agak besar.
Kelemahan BLDC
Mari kita kembali kepada soalan yang ditinggalkan di hadapan: apakah keburukan BLDC?
Saya percaya anda sudah meneka: kami telah menghabiskan begitu banyak ruang untuk bercakap tentang kaedah kawalan BLDC, cukup untuk melihat kesukaran kawalannya, berbanding dengan motor berus, adalah jauh lebih tinggi!
Jadi, kelemahan terbesar BLDC ialah kesukaran kawalannya yang tinggi dan harga pemanduan ESC yang tinggi (Kawalan Kelajuan Elektronik, Pendek kata ESC).
Ia juga mempunyai kelemahan bahawa BLDC disebabkan oleh rintangan induktif, permulaan akan disertai dengan kegelisahan, tidak seperti motor berus mula begitu lancar.
Pada masa ini, terdapat tiga kaedah kawalan motor tanpa berus arus perdana seperti berikut.
1、Kawalan gelombang persegi.
Juga dikenali sebagai kawalan gelombang trapezoid, 120° kawalan, 6-kawalan pertukaran langkah
Kaedah kawalan gelombang persegi mempunyai kelebihan algoritma kawalan mudah, kos perkakasan yang rendah, penggunaan prestasi biasa pengawal akan dapat memperoleh kelajuan motor yang tinggi.
Kelemahannya ialah turun naik tork adalah besar, terdapat sejumlah bunyi semasa, dan kecekapan tidak mencapai maksimum. Kawalan gelombang persegi sesuai untuk aplikasi yang tidak memerlukan prestasi putaran motor yang tinggi.
Kawalan gelombang persegi menggunakan penderia Hall atau algoritma anggaran tanpa sensor untuk mendapatkan kedudukan pemutar motor, dan kemudian melakukan enam ulangan (satu setiap 60°) berdasarkan kedudukan rotor dalam kitaran elektrik 360°.
Pada setiap kedudukan pertukaran motor mengeluarkan daya dalam arah tertentu, jadi boleh dikatakan bahawa ketepatan kedudukan kawalan gelombang persegi ialah elektrik 60°.
Oleh kerana bentuk gelombang arus fasa motor adalah hampir dengan gelombang persegi dengan cara kawalan ini, ia dipanggil kawalan gelombang persegi.

2、Kawalan gelombang sinus.
Kaedah kawalan gelombang sinus menggunakan gelombang SVPWM, dan output ialah voltan gelombang sinus 3 fasa, dan arus yang sepadan juga merupakan arus gelombang sinus.
Kaedah ini tidak mempunyai konsep pergantian kawalan gelombang persegi, atau berfikir bahawa kitaran elektrik dalam bilangan pertukaran yang tidak terhingga.
Jelas sekali, berbanding dengan kawalan gelombang persegi, kawalan gelombang sinus mempunyai kurang turun naik tork dan kurang harmonik semasa, yang membuatkan kawalan terasa lebih “halus”, tetapi keperluan prestasi pengawal adalah lebih tinggi sedikit daripada kawalan gelombang persegi, dan kecekapan motor tidak dapat dimaksimumkan.
3、kawalan FOC

Juga dikenali sebagai penukaran frekuensi vektor, kawalan arah vektor medan magnet
Kawalan gelombang sinus merealisasikan kawalan vektor voltan, secara tidak langsung menyedari kawalan saiz semasa, tetapi tidak dapat mengawal arah arus.
Kaedah kawalan FOC boleh dianggap sebagai versi kawalan gelombang sinus yang dinaik taraf, yang merealisasikan kawalan vektor semasa, i.e., kawalan vektor medan pemegun motor.
Oleh kerana arah medan stator dikawal, medan pemegun dan medan pemutar boleh dikekalkan pada 90° pada setiap masa, dan output tork maksimum pada arus tertentu boleh dicapai.
Kelebihan kaedah kawalan FOC ialah: turun naik tork rendah, kecekapan tinggi, bunyi yang rendah dan tindak balas dinamik yang pantas.
Kelemahannya ialah: kos perkakasan yang lebih tinggi, keperluan yang lebih tinggi untuk prestasi pengawal, dan parameter motor perlu dipadankan.
FOC kini merupakan pilihan terbaik untuk kawalan cekap motor DC tanpa berus (BLDC) dan motor segerak magnet kekal (PMSM).
FOC mengawal dengan tepat magnitud dan arah medan magnet, yang menjadikan tork motor lancar, bunyi rendah, kecekapan tinggi, dan mempunyai tindak balas dinamik berkelajuan tinggi.
Oleh kerana kelebihan FOC yang jelas, banyak syarikat kini secara beransur-ansur menggantikan kawalan produk tradisional dengan FOC untuk pelbagai aplikasi.
Germany Trinamic mempunyai cip kawalan servo dengan kawalan vektor medan magnet (FOC) — TMC4671-LA
– Mod kawalan tork
– Mod kawalan kelajuan
– Mod kawalan kedudukan
– Kekerapan penyegaran semula kawalan semasa dan kekerapan PWM maksimum 100KHz (kekerapan muat semula untuk kawalan kelajuan dan kedudukan boleh dikonfigurasikan sebagai gandaan frekuensi muat semula semasa)

TMC4671 ialah cip kawalan servo bersepadu sepenuhnya yang menyediakan kawalan arah medan magnet untuk motor DC tanpa berus, motor segerak magnet kekal, 2-motor stepper fasa, motor DC berus dan motor gegelung suara.
Semua fungsi kawalan disepadukan ke dalam perkakasan. Dengan ADC bersepadu, antara muka sensor kedudukan, dan perbezaan kedudukan, pengawal servo berciri penuh ini sesuai untuk pelbagai aplikasi servo.
2、Prinsip kerja BLDC
BLDC adalah sejenis motor, jadi komposisi paling asasnya tidak boleh dipisahkan daripada stator dan rotor.
Pemegun motor berus ialah magnet kekal, manakala pemutarnya ialah gegelung bertenaga (penggulungan). Seperti yang ditunjukkan dalam rajah di bawah.

Tetapi untuk BLDC, sebaliknya adalah benar!
Pemegun (pemegun) BLDC ialah gegelung bertenaga, manakala pemutar adalah magnet kekal!

daripada “Hukum Maxwell-Ampere”, kita boleh tahu bahawa ruang berhampiran gegelung bertenaga akan menghasilkan medan magnet. Dan arah pengagihan medan magnet, kita boleh menggunakan “peraturan tangan kanan” untuk memperolehi.
Sebenarnya, inilah yang sering kita panggil “elektromagnet”!
Kemudian perkara seterusnya adalah mudah, apakah sifat-sifat magnet?
Jantina yang sama menolak antara satu sama lain, berlainan jantina menarik antara satu sama lain!
Jadi, kita hanya perlu memberikan gegelung pada stator untuk mengakses arah arus yang sesuai, itu dia, supaya kutub magnet arah elektromagnet.
Jadi, kita hanya perlu menyambungkan gegelung pada stator ke arah arus yang sesuai, itu dia, biarkan arah kutub magnet elektromagnet dan arah kutub magnet magnet kekal sepadan dengan tepat, tidak boleh menolak, atau menarik pemutar untuk melakukan gerakan putaran.
Pengoptimuman stator
Kaedah pemanduan di atas, i.e. menjana tenaga setiap gegelung secara individu dalam urutan, boleh dilaksanakan tetapi terlalu menyusahkan dan tidak cekap.
Oleh itu, BLDC sebenar akan menggabungkan enam gegelung tersebut dua demi dua dan membahagikannya kepada tiga belitan, A, B, dan C, seperti berikut.

Dengan cara ini kita boleh memacu dua elektromagnet pada masa yang sama, yang serta-merta menggandakan kecekapan.
Tetapi ini hanya dengan magnet “tarikan” ciri-ciri, jangan lupa bahawa magnet juga “penolakan” ciri-ciri.
Jika kita memandu satu set gegelung pada masa yang sama, supaya set gegelung sebelumnya “menarik” pemutar apabila set gegelung yang lain “menghalau” pemutar, maka rotor kita akan mendapat daya penggerak yang lebih tinggi!
Setakat ini, model ini telah mula mendekati produk BLDC sebenar.
Tetapi untuk model di atas
Namun begitu, untuk model di atas, kita perlu membekalkan dua belitan dengan dua set kuasa dalam arah yang bertentangan untuk mencapai kesan “tarikan” dan “penolakan” pada masa yang sama.
Ini terlalu rumit dan mahal untuk aplikasi praktikal.
Seterusnya kita akan bercakap tentang “Kaedah kawalan BLDC”, yang akan menyelesaikan masalah di atas.
3、kaedah kawalan BLDC
A yang asal, B, C tiga belitan adalah bebas, jadi sangat menyusahkan untuk mengawal mereka.
Kemudian jika kita menyambung tiga belitan A,B,C bersama dan disatukan a “susunan bintang”, apa akan jadi hasilnya?

Pada asalnya tiga belitan, membawa kepada enam baris; kini membawa kepada garisan dikurangkan kepada hanya tiga baris, jadi bagaimana untuk mencapai kesan kawalan yang sama dengan enam baris yang disambungkan?
Rajah berikut.
Bahagian positif bekalan kuasa disambungkan ke penjuru kanan sebelah atas input belitan A, manakala bahagian negatif bekalan kuasa disambungkan ke sudut kiri bawah keluaran belitan B.
Kali ini belitan A dan belitan B dipacu pada masa yang sama, dan kekutubannya betul-betul bertentangan, untuk mencapai kesan yang sama apabila tiga belitan didorong secara bebas!
Jadi dengan mengikuti urutan ini: AB-AC-BC-BA-CA-CB, enam rentak, dan mengayuh belitan stator secara bergilir-gilir, pemutar boleh terus berputar!
Enam suis elektronik boleh digunakan untuk memacu enam rentak ini, seperti berikut.
Pengesanan kedudukan
Walaupun kita sudah tahu bagaimana untuk mengawal enam rentak rotor.
Tetapi adakah anda telah menemui masalah baru: jika anda tidak tahu kedudukan rotor, bagaimana anda tahu bila hendak memandu belitan yang mana?
Jadi kita kena tahu kedudukan semasa rotor!
Dan kedudukan rotor dikesan dalam dua cara umum.
1, Kaedah pengesanan penderia dewan.
Rajah berikut, masukkan ke dalam pemegun H1,H2,H3, tiga sensor Hall, anda boleh mengetahui kedudukan sebenar stator semasa.
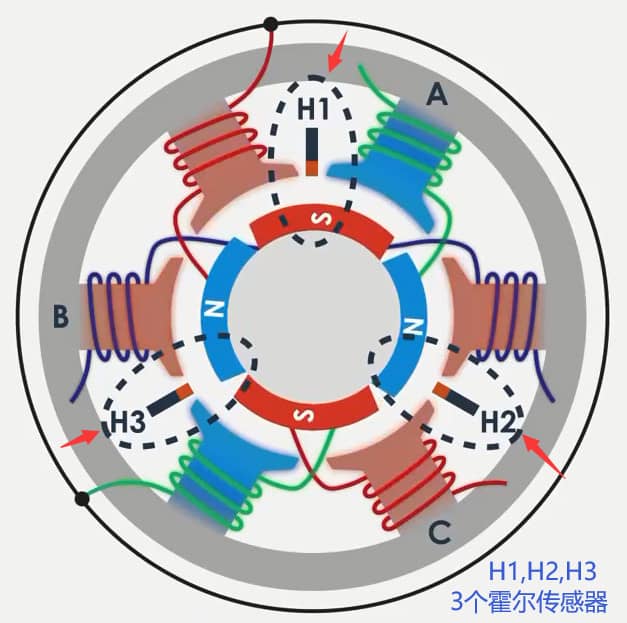
Output penderia dewan dengan tahap tinggi dan rendah untuk ditunjukkan.

2, kaedah pengesanan daya gerak elektrik songsang
Kaedah pengesanan EMF belakang adalah berdasarkan prinsip aruhan elektromagnet.
Apabila medan magnet (fluks magnet) sekitar perubahan penggulungan yang tidak bertenaga, potensi elektrik teraruh dalam belitan ini.
Dengan mengesan magnitud dan arah potensi elektrik ini, kita juga boleh mengetahui kedudukan semasa stator.

Kedua-dua kaedah pengesanan ini mempunyai kelebihan dan kekurangannya.
Pengesanan penderia dewan adalah lebih tepat sedikit, tetapi juga lebih mahal.
sebaliknya, kaedah pengesanan daya gerak elektrik songsang adalah lebih menjimatkan, tetapi kurang tepat sedikit.
Rotor dalam atau rotor luar
BLDC mempunyai dua jenis struktur: pemutar di dalam dipanggil pemutar dalam BLDC; sebaliknya, pemutar di luar dipanggil pemutar luar BLDC.

Secara relatifnya, pemutar luar BLDC digunakan lebih kerap.
Sebab utama ialah pemutar luar BLDC lebih stabil dalam struktur mekanikal. Ini kerana pemutar motor mempunyai kecenderungan untuk mengembang ke luar disebabkan oleh daya emparan di bawah operasi kelajuan tinggi.
Jadi pemutar dalam BLDC memerlukan ketepatan mekanikal yang sangat tinggi untuk memastikan pemutar dan pemegun tidak akan melawan.
Tetapi jika jarak yang dikhaskan terlalu jauh, ia akan membawa kepada kebocoran magnet dan menjejaskan kecekapan keseluruhan motor.
Tetapi ini bukan masalah dengan rotor luar BLDC, kerana pemutar luar secara semula jadi tidak terjejas oleh pengembangan.
4、Aplikasi praktikal BLDC
Kemudian mari kita lihat seterusnya, senario aplikasi sebenar BLDC.
1, kipas penyejuk senyap penyejukan udara adalah pilihan pertama untuk banyak peranti penyejukan.
Sebagai contoh, banyak yang utama “senyap” casis di pasaran, jika penggunaan penyejukan udara, kipas penyejuk di dalam pada asasnya adalah penggunaan BLDC.
Tapak yang digunakan untuk menghilangkan haba ke komputer riba juga biasa digunakan BLDC, sebagai tambahan kepada beberapa sistem penyejukan pengudaraan yang besar di dalamnya, penggunaan kipas BLDC. Terdapat juga peniup udara berkelajuan tinggi dan produk lain.
2, Dron berbilang paksi digunakan dalam BLDC kuasa yang lebih besar, disesuaikan dengan ESC yang sesuai (ESC), dan kemudian gunakan PWM untuk mengawal kelajuan BLDC adalah sangat mudah.

3, Alat kuasa dan produk lain, seperti kumpulan elektrik, pengeluaran domestik sepana elektrik pada asasnya digunakan BLDC, dan kebanyakan gerudi tangan juga.
Terutamanya kerana kecekapan tinggi BLDC, dan menjadikan alatan kuasa berkuasa bateri tahan lebih lama. Perkara lain ialah output tork motor tanpa berus adalah sangat stabil.
Terdapat juga pemampat peti sejuk, kipas penyejuk beku, serta pembersih udara, pembersih vakum/penyapu, senapang fascia, dan lain-lain., yang sangat panas dalam beberapa tahun kebelakangan ini, kebanyakannya didorong oleh BLDC.
