재활로봇용 모터(dc 모터 로봇)?
재활 로봇(dc 모터 로봇) 사용 재활 로봇 그것은 의료 로봇의 지점에 속합니다, 5G의 인기로 인해 의료 분야에서 널리 사용됨, 재활 및 기타 분야; 재활 로봇(dc 모터 로봇) 관절에서, 운전하다, 쟁반, 걷기 및 기타 구성 요소가 널리 사용되는 마이크로 브러시 DC 모터, 브러시리스 DC 모터, 스테퍼 모터, 중공 컵 모터, 서보 및 기타 마이크로 모터, 드라이브 모터로. 대개, 또한 감속 기어박스와 함께 사용됩니다.. 다음은 재활 로봇에 사용될 마이크로 모터의 종류와 매개 변수에 대한 세부 정보입니다..
첫 번째. DC 기어드 모터
제품 카테고리: DC 기어드 모터
제품 모델:ZWMD008008-152-01
제품 사양: Φ8MM 제품
전압:4.2V
무부하 속도:15000-30000rpm
무부하 전류: <105 엄마 (사용자 정의 할 수 있습니다)
감속비: 152:1 (맞춤형)
정격 부하:주문형 맞춤형

두번째, 스테퍼 기어드 모터
제품 분류: 스테퍼 기어드 모터
외경: 6mm
재료: 하드웨어
회전 방향: 씨우&CCW
변속기 반환 차이: ≤3°
베어링: 오일 베어링; 롤링 베어링
축 런아웃: ≤0.3mm (오일 베어링); ≤0.2mm (롤링 베어링)
출력축 레이디얼 하중: ≤ 0.5N (오일 베어링); ≤ 5N (롤링 베어링)
작동 온도: -20……+85℃

삼, 중공 컵 모터
제품 분류: 중공 컵 기어드 모터
외경: 24mm
재료: 플라스틱
회전 방향: 씨우&CCW
변속기 반환 차이: ≤3° (사용자 정의 할 수 있습니다)
베어링:오일베어링;롤링 베어링
축 런아웃: ≤0.1mm(오일 베어링);≤0.1mm(롤링 베어링)
출력축 레이디얼 하중:≤50N(오일 베어링);≤100N(롤링 베어링)
입력 속도:≤15000rpm
작동 온도:-20……+85℃

4, DC 브러시 모터
제품 분류: DC 브러시드 기어드 모터
외경: 10mm
재료: 하드웨어
회전 방향: 씨우&CCW
변속기 반환 차이: ≤3°
베어링:오일 베어링;롤링 베어링
축 런아웃: ≤0.3mm(오일 베어링);≤0.2mm(롤링 베어링)
출력축 레이디얼 하중: ≤2N (오일 베어링); ≤7N (롤링 베어링)
작동 온도: -20 ……+85℃

V. 브러시리스 DC 모터
제품 카테고리: 브러시리스 기어 모터
제품 사양:Φ20MM 제품
전압:12V
무부하 전류:220 mA (맞춤형)
적재 속도:2.4-1000 rpm(맞춤형)
감속비: 5/25/125/625:1 (맞춤형)

육, 맞춤형 비표준 서보
상품명: 로봇 서보
프로젝트 설명 현대 첨단 기술로 개발된 다양한 유형의 로봇 관절의 요구를 충족시키기 위해, 우리는 3.4MM에서 45MM에 이르는 사양의 로봇 조인트 기어 박스를 생산합니다.; 서보 기어의 설계 및 제작 정밀도와 서보의 복귀 차이 제어를 해결하기 위해, 우리는 다년간의 R에 따라 서보 기어의 설계 및 제조 정밀도를 최적화했습니다.&반환 차이를 줄이기 위해 로봇 관절의 시장 수요와 결합된 D 및 디자인 경험.
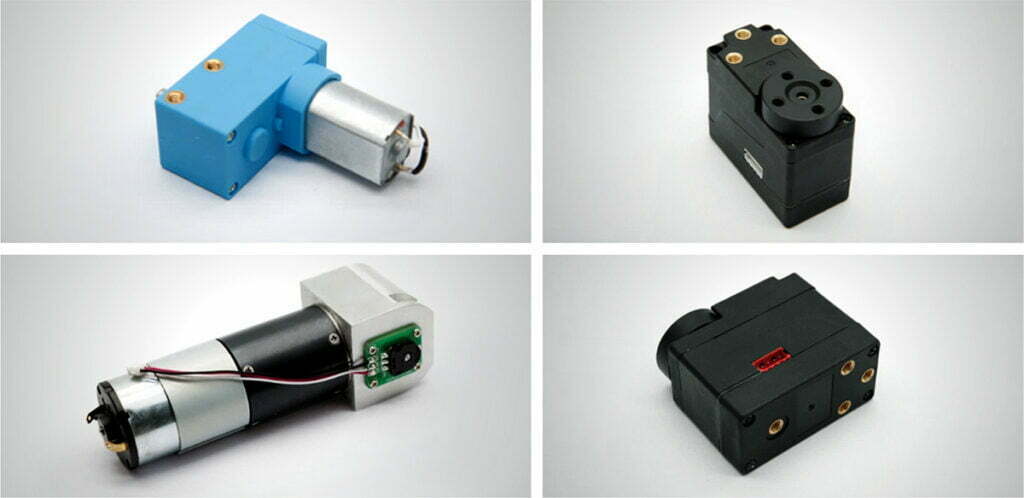
재활 로봇의 다양한 부품, 다른 마이크로 드라이브 모터 사용, 서보 기구, 비표준 맞춤형 드라이브 모터, 일반적으로 조인트 서보에 적용, 드라이브 회전, 사지 상호 작용 및 기타 드라이브 모듈.
