リハビリテーションロボット用のモーター(DCモーターロボット)?
Rehabilitation robot(DCモーターロボット) use Rehabilitation robotics it belongs to a branch of medical robot, due to the popularity of 5G is widely used in medical, rehabilitation and other fields; rehabilitation robot(DCモーターロボット) in the joints, ドライブ, tray, walking and other components widely used micro brush DC motor, ブラシレスDCモーター, ステッピングモーター, 中空カップモーター, servo and other micro motors, 駆動モーターとして. いつもの, they are also used together with a reduction gearbox. The following details the types of micro motors and parameters that will be used in rehabilitation robots.
初め. DCギヤードモーター
製品カテゴリー: DCギア付きモーター
Product Model:ZWMD008008-152-01
製品仕様: Φ8MM product
電圧:4.2V
無負荷速度:15000-30000回転数
無負荷電流: <105 ミリアンペア (カスタマイズできます)
減速比: 152:1 (カスタマイズ可能な)
Rated load:customized on demand

2番, stepper geared motor
製品分類: Stepper geared motor
Outside diameter: 6んん
材料: Hardware
回転方向: CW&反時計回り
ギアボックスのリターン差: ≤3°
ベアリング: オイルベアリング; 転がり軸受
アキシアル振れ: ≤0.3mm (オイルベアリング); ≤0.2mm (転がり軸受)
出力軸ラジアル荷重: ≦0.5N (オイルベアリング); ≦5N (転がり軸受)
使用温度: -20……+85℃

三つ, 中空カップモーター
製品分類: 中空のカップギア付きモーター
外径: 24んん
材料: プラスチック
回転方向: CW&反時計回り
ギアボックスのリターン差: ≤3° (カスタマイズできます)
ベアリング:Oil bearing;転がり軸受
アキシアル振れ: ≤0.1mm(オイルベアリング);≤0.1mm(転がり軸受)
出力軸ラジアル荷重:≤50N(オイルベアリング);≤100N(転がり軸受)
入力速度:≤15000rpm
動作温度:-20……+85℃

4, DCブラシモーター
製品分類: DC brushed geared motor
外径: 10んん
材料: ハードウェア
回転方向: CW&反時計回り
ギアボックスのリターン差: ≤3°
ベアリング:オイルベアリング;転がり軸受
アキシアル振れ: ≤0.3mm(オイルベアリング);≤0.2mm(転がり軸受)
出力軸ラジアル荷重: ≦2N (オイルベアリング); ≤7N (転がり軸受)
動作温度: -20 ……+85℃

V. ブラシレスDCモーター
製品カテゴリー: Brushless gear motor
Product Specifications:Φ20MM品
電圧:12V
無負荷電流:220 mA(カスタマイズ可能))
ロード速度:2.4-1000 rpm(カスタマイズ可能))
減速比: 5/25/125/625:1 (カスタマイズ可能な)

Six, カスタム非標準サーボ
商品名: Robot servo
Project description In order to meet the needs of various types of robot joints developed by modern high technology, we produce robot joint gearboxes with specifications ranging from 3.4MM to 45MM; in order to solve the design and manufacturing precision of the servo gear and the control of the return difference of the servo, we have optimized the design and manufacturing precision of the servo gear according to our many years of R&D and design experience combined with the market demand of robot joints to reduce the return Difference.
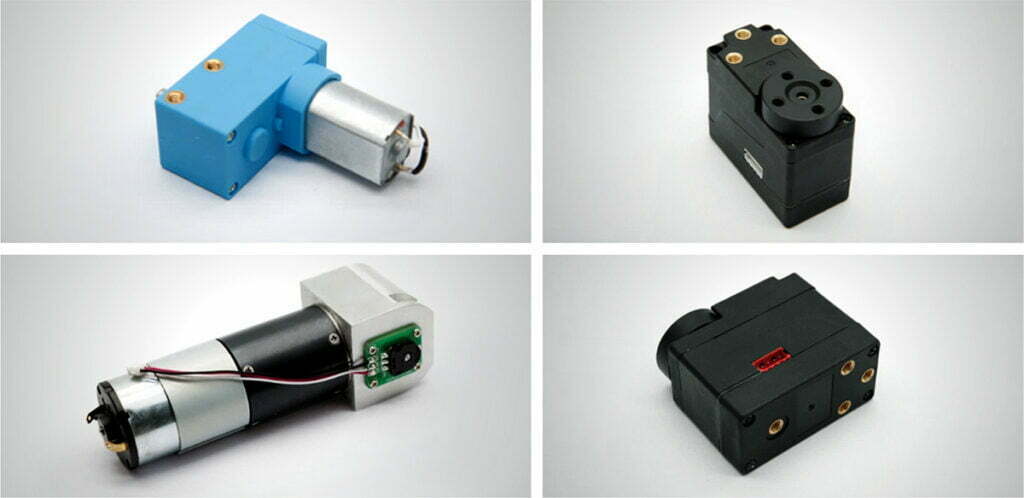
Different parts in the rehabilitation robot, using different micro drive motors, servo, non-standard custom drive motors, usually applied in the joint servo, drive rotation, limb interaction and other drive modules.
