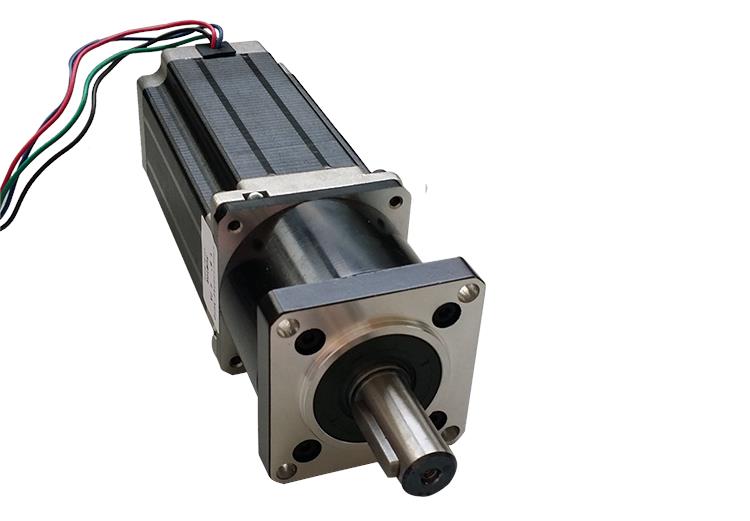
6 DCステッパーモーターギアボックスを選択することを検討する要因
DCステッピングモーター ギアボックス 非常に広く使用されている還元剤トランスミッション装置です, 次の要因の選択では、考慮する必要があります.

1. ステップ角の選択: モーターのステップ角は、負荷精度の要件に依存します, 負荷の最小解像度 (同等) モーターシャフトに変換されました, それぞれの同等のモーターがいくつの角度を付けるべきか (減速を含む). モーターのステップ角は、この角度よりも等しいかそれ以下でなければなりません. のステップ角 ステッピングモーター 一般的に市場にはあります 0.36 学位 / 0.72 学位 (5相モーター), 0.9 学位 / 1.8 学位 (二, 4相モーター), 1.5 学位 / 3 学位 (三相モーター), 等.
2. 静的トルク選択: ステッピングモーターの動的トルクを一度に決定するのは困難です, 最初にモーターの静的トルクを決定する傾向があります. 静的トルクの選択は、モーター作業負荷に基づいています, 負荷は、2種類の慣性負荷と摩擦荷重に分けることができます. 単一の慣性負荷と単一の摩擦荷重は存在しません.
直接開始するとき (一般的に低速から) 両方の負荷を考慮する必要があります, 開始を加速するとき, 慣性負荷は主に考慮されます, 一定の速度で実行するとき, 摩擦荷重が考慮される限り. 一般的に, 静的トルクはそうあるべきです 2-3 摩擦負荷が財の中で負荷をかけます, 一度選択された静的トルク, モーターシートと長さを決定することができます (ジオメトリ).
3. 電流の選択: 同じモーターの静的トルク, 現在のパラメーターが異なるため, その動作特性は大きく異なります, モーメント周波数特性グラフに基づくことができます, モーター電流を決定します.
4. タイプの選択: ギア付きモーターには2つのタイプがあります: ケージの種類とワイヤーワウンドタイプ. ケージギア付きモーター構造は簡単です, メンテナンスが簡単です, 安価, しかし、開始パフォーマンスは貧弱です, 一般的なノーロードまたは軽負荷開始生産機械側を選択できます; ワイヤウンドギア付きモーター開始トルク, 開始電流は小さいです, しかし、構造は複雑です, 開始とメンテナンスはより困難です, 大規模な開始トルクの機会の必要性のためにのみ, リフティング機器など, 機械装置の適切な速度制御の必要性に加えて.
5. 電源選択: ステッパーモーターギアボックスのパワーの選択は、生産機械によって決定されます, あれは, 負荷に必要な電力によって. 次の式を備えた速度削減モーターに必要なモーターパワー: モーターパワー=トルク÷ 9550 ×モーターパワー入力RPM÷速度比÷使用係数 .
6. 速度の選択: ギア付きモーターの速度は同期速度に近い, そして、磁場速度は磁気極の数によって等分化されます. 2つのグレード間の速度は使用できません. ギア付きモーターの速度選択の原理は、回転装置を簡素化するために、生産機械の速度にできるだけ近づくことです.
