
ブラシレス DC モーター - BLDC の基礎 — TMC4671-LA
ブラシレスDCモーターといえば, ブラシモーターについて言及する必要があります. ブラシモーターにはかなり厄介な欠点があります: あれは “うるさい”.
ブラシと整流リングは常に摩擦する必要があるため, アーマチュアに電力を供給するために.
それで, 欲しいなら “静かなファン”, ブラシモーター製品の使用を選択することはできません.
そして、長期間使用するとブラシが損傷する可能性が高くなります. 電流が大きいとき, 方向を変えるとブラシがパチパチと音を立てて火花を散らすのを見ることもできます.
これらの欠点はいずれも見つかりません ブラシレスDCモーター-BLDC 以下で紹介します!
ブラシレスをご紹介します DCモーター-BLDC (BLDCの略称) 以下の4つの側面から.
1, BLDCの長所と短所.
2, BLDCの動作原理.
3, BLDCの制御モード.
4, BLDCの実際の使用方法.
1、BLDCのメリットとデメリット
ブラシレスDCモーター, 文字通り, その最大の特徴は “ブラシレス”, つまりブラシがありません.
ブラシがないので, ブラシモーターのいくつかの欠点を回避するのに非常に完璧です。. それで順番に, その主な利点は次のとおりです.
1, 長い人生; 2, 黙っていてもいい; 3, 高効率 (低損失); 4, 小さいサイズ; 5, 高い安定性.
- 1. ブラシレス DC モーターは幅広い速度で動作します, どんな速度でも, フルパワーで実行できる.
- 2. 優れた過負荷容量と高い運転効率.
- 3. ブラシレスDCモーターの小型化, ブラシモーターに比べて応用範囲が広く、出力密度が高い.
- 4. 非同期モーターの駆動制御との比較, ドライブはよりシンプルです.
- 5. ブラシレスDCモーターは機械的な整流子構造を持たず、内部に密閉されています。, 飛散粉塵のモータ内部への侵入を防ぎ、さまざまなトラブルの原因となる高い信頼性を実現します。.
- 6. 外観特性が良くなった, 低速動作, 大きなトルクを出力できる, 比較的大きな始動トルクを提供できる.
BLDCのデメリット
前に残された質問に戻りましょう: BLDCの欠点は何ですか?
もうお分かりかと思いますが、: BLDC の制御方法について説明するために多くの紙面を費やしてきました。, その制御の難しさは十分にわかります, ブラシモーターと比較して, はるかに高いです!
BLDC の最大の欠点は、制御の難易度が高く、ESC の駆動コストが高いことです。 (電子速度制御装置, 略してESC).
また、誘導抵抗により BLDC が動作しなくなるという欠点もあります。, スタートにはジッターが伴います, ブラシモーターとは異なり、非常にスムーズに始動します.
現在のところ, ブラシレスモーターの制御方式は主に以下の3つが主流です。.
1、方形波制御.
台形波制御とも呼ばれます, 120°制御, 6-ステップ転流制御
方形波制御方式は、制御アルゴリズムがシンプルであるという利点があります。, ハードウェアコストが低い, 通常のパフォーマンスの使用 コントローラ 高いモーター速度を得ることができます.
欠点はトルク変動が大きいこと, ある程度の電流ノイズがある, 効率が最大に達しない. 方形波制御は高いモーター回転性能を必要としない用途に適しています。.
方形波制御では、ホール センサーまたはセンサーレス推定アルゴリズムを使用してモーター ローターの位置を取得します。, その後 6 回の整流を実行します (60°ごとに1つ) 360°電気サイクル内のローター位置に基づく.
各転流位置で、モーターは特定の方向に力を出力します。, したがって、方形波制御の位置精度は電気的に 60°であると言えます。.
この制御ではモータの相電流波形が方形波に近くなりますので、, 方形波制御といいます.

2、正弦波制御.
正弦波制御方式はSVPWM波を使用, 出力は三相正弦波電圧です, 対応する電流も正弦波電流です.
この方式には方形波制御整流の概念がありません。, あるいは、電気サイクルが無限回整流すると考えてください。.
明らかに, 方形波制御との比較, 正弦波制御によりトルク変動が少なく、電流高調波も少ない, コントロールの感触が良くなります “繊細”, しかし、パフォーマンス要件は、 コントローラ 方形波制御よりわずかに高い, モーターの効率を最大化することができません.
3、フォーカスコントロール

ベクトル周波数変換とも呼ばれます, 磁場ベクトル方向制御
正弦波制御により電圧ベクトルの制御を実現, 間接的に電流サイズの制御を実現, ただし、電流の方向を制御することはできません.
FOC制御方式は正弦波制御の発展版と言えます。, 電流ベクトルの制御を実現します, つまり, モーターステーターフィールドのベクトル制御.
固定子の磁界の方向が制御されるため、, ステーター磁界とローター磁界を常に90°に保つことができます。, 特定の電流で最大トルク出力を達成できます。.
FOC制御方式の利点は次のとおりです。: トルク変動が少ない, 高効率, 低ノイズと高速な動的応答.
短所は次のとおりです。: ハードウェアのコストが高くなる, コントローラーのパフォーマンスに対するより高い要件, とモーターのパラメーターを一致させる必要があります.
FOC は現在、ブラシレス DC モーターを効率的に制御するための最良の選択肢です (BLDC) および永久磁石同期モーター (PMSM).
FOC は磁場の大きさと方向を正確に制御します, モーターのトルクをスムーズにします, 低ノイズ, 高効率, 高速な動的応答性を備えています。.
FOC には明らかな利点があるため、, 多くの企業は現在、さまざまな用途で従来の製品の制御を徐々に FOC に置き換えています。.
ドイツ Trinamic は磁場ベクトル制御を備えたサーボ制御チップを搭載 (FOC) — TMC4671-LA
– トルク制御モード
– 速度制御モード
– 位置制御モード
– 電流制御リフレッシュ周波数と最大 PWM 周波数 100KHz (速度と位置制御のリフレッシュ頻度は、現在のリフレッシュ頻度の倍数として構成できます。)

TMC4671 は、ブラシレス DC モーターの磁界方向制御を提供する完全に統合されたサーボ制御チップです。, 永久磁石同期モーター, 2-相ステッピングモーター, ブラシ付きDCモーターとボイスコイルモーター.
すべての制御機能がハードウェアに統合されています. 統合型 ADC を搭載, 位置センサーインターフェース, そして位置差, このフル機能のサーボ コントローラーは、さまざまなサーボ アプリケーションに適しています。.
2、BLDCの動作原理
BLDCはモーターの一種です, そのため、その最も基本的な構成はステーターとローターから分離できません。.
ブラシモーターのステーターは永久磁石です, ローターは通電されたコイルです (巻き取り). 下図に示すように.

しかしBLDCに関しては, その逆は真実です!
ステーター (ステーター) BLDC のは通電されたコイルです, ローターは永久磁石ですが、!

から “マクスウェル・アンペアの法則”, 通電されたコイルの近くの空間が磁場を生成することがわかります。. そして磁場分布の方向, を使用できます “右手の法則” 導き出す.
実際には, これは私たちがよく呼ぶものです “電磁石”!
それでは次は簡単です, 磁石の性質は何ですか?
同性は反発し合う, 異性は互いに惹かれ合う!
それで, 電流の適切な方向にアクセスするには、ステーター上のコイルを与えるだけです。, あれは, 電磁石の磁極の向きが同じになるように.
それで, ステーターのコイルを適切な電流方向に接続するだけです。, あれは, 電磁石の磁極の方向と永久磁石の磁極の方向を正確に一致させます, 撃退できないこと, またはローターを引き付けて回転運動を行います.
ステーターの最適化
上記の駆動方法は, つまり. 各コイルを順番に個別に通電する, 実現可能だが面倒で非効率的すぎる.
したがって, 実際の BLDC は、これら 6 つのコイルを 2 つずつ結合し、3 つの巻線に分割します。, あ, B, とC, 次のように.

このようにして、2つの電磁石を同時に駆動できます, すぐに効率が2倍になります.
ただし、これは磁石を使用した場合のみです “アトラクション” 特徴, 磁石も忘れずに “反発” 特徴.
別のコイルセットを同時に駆動すると, 前のコイルのセットが “引きつける” 他のコイルセットの場合、ローター “撃退する” ローター, そうすれば、ローターはより高い駆動力を得ることができます!
ここのところ, このモデルは実際の BLDC 製品に近づき始めています.
ただし上記モデルの場合
しかし, 上記モデルの場合, の効果を達成するには、2 つの巻線に 2 セットの電力を逆方向に供給する必要があります。 “アトラクション” と “反発” 同時に.
これは実用化するには複雑すぎてコストがかかります.
次にお話しますのは、 “BLDC制御方式”, 上記の問題を解決します.
3、BLDCの制御方式
オリジナルのA, B, C 3つの巻線は独立しています, したがって、それらを制御するのは非常に面倒です.
次に、A の 3 つの巻線を接続すると、,B,Cを一緒にして、aをまとめる “星の配置”, 結果はどうなるでしょうか?

元々は3巻き, 6行につながる; 行は 3 行のみに減りました, では、このように接続された 6 つのラインで同じ制御効果を実現するにはどうすればよいでしょうか。?
次の図.
電源のプラス側はA巻線入力の右上隅に接続されています, 電源のマイナス側はB巻線出力の左下隅に接続されています。.
今回はA巻線とB巻線を同時に駆動します, そしてその極性は全く逆です, 3 つの巻線が独立して駆動される場合にも同じ効果が得られます。!
したがって、この順序に従ってください: AB-AC-BC-BA-CA-CB, 6つのビート, 固定子巻線を順番に循環させます, ローターは回転し続けることができます!
6 つの電子スイッチを使用してこれら 6 つのビートを駆動できます, 次のように.
位置検出
ローターの6つのビートを制御する方法はすでに知っていますが、.
しかし、新たな問題は見つかりましたか: ローターの位置がわからない場合, いつどのワインディングを運転すべきかどうやってわかりますか??
したがって、ローターの現在位置を知る必要があります!
ローターの位置は 2 つの一般的な方法で検出されます。.
1, ホールセンサー検出方式.
次の図, ステーターH1、H2、H3に入れます, 3つのホールセンサー, ステーターの現在の正確な位置を知ることができます.
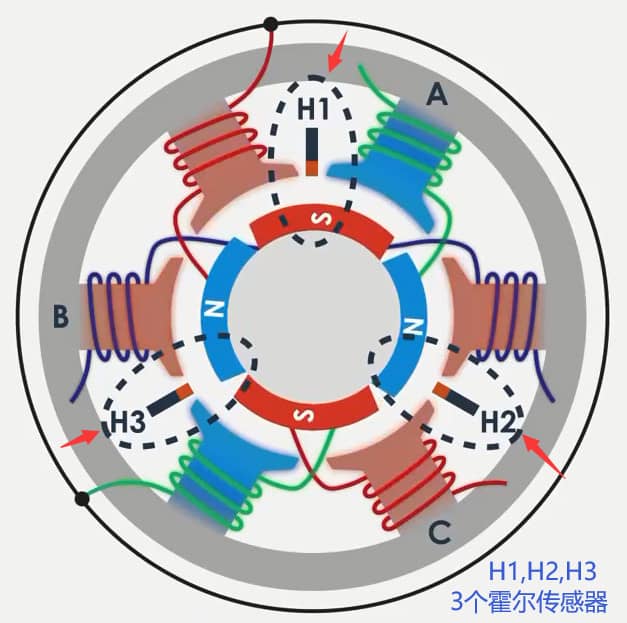
ホールセンサー出力を示すハイレベルとローレベル.

2, 逆起電力検出方式
逆起電力検出方式は電磁誘導の原理に基づいています.
磁場が発生したとき (磁束) 通電されていない巻線の周囲が変化する, この巻線に電位が誘導されます.
この電位の大きさと方向を検出することで, ステーターの現在位置も知ることができます.

これら 2 つの検出方法には長所と短所があります.
ホールセンサーの検出が少し正確になりました, しかし、より高価でもあります.
それどころか, 逆起電力検出方式の方が経済的, ただし精度は若干劣ります.
インナーローターまたはアウターローター
BLDCには2種類の構造があります: 内側のローターをインナーローターBLDCと呼びます; それどころか, 外側のローターはアウターローターBLDCと呼ばれます.

相対的に言えば, アウターローターBLDCがより頻繁に使用されます.
主な理由は、アウターローター BLDC の機械的構造がより安定しているためです。. これは、高速運転時にモーターローターが遠心力により外側に膨張する傾向があるためです。.
そのため、ローターとステーターが衝突しないように、インナーローター BLDC には非常に高い機械精度が必要です。.
ただし、予約された距離が遠すぎる場合は、, 磁気漏れが発生し、モーターの全体的な効率に影響を与えます。.
しかし、これはアウターローター BLDC の問題ではありません。, アウターローターは当然膨張の影響を受けないため、.
4、BLDCの実用化
それでは次も見てみましょう, BLDCの実際の適用シナリオ.
1, 静音冷却ファン空冷は多くのデバイス冷却の第一選択です.
例えば, 主要なものの多くは “静けさ” 市販のシャーシ, 空冷を使用する場合, 内部の冷却ファンは基本的にBLDCを使用しています.
ラップトップへの熱を放散するために使用されるベースも一般的に使用される BLDC です, 内部にはいくつかの大型換気冷却システムに加えて、, BLDCファンの使用. 高速送風機などもございます.
2, 多軸ドローンはより大出力の BLDC で使用されています, 適切な ESC に適合 (ESC), PWM を使用して BLDC 速度を制御すると非常に便利です.

3, 電動工具およびその他の製品, 電動バッチなど, 国内生産の電動レンチは基本的にBLDCを使用します, そしてほとんどのハンドドリルも同様です.
主にBLDCの効率の高さによるものです, バッテリー駆動の電動工具をより長持ちさせます. もう一つのポイントは、ブラシレスモーターのトルク出力が非常に安定していることです。.
冷蔵庫用コンプレッサーもございます, 冷凍庫冷却ファン, 空気清浄機も同様に, 掃除機/掃除機, 筋膜銃, 等, 近年とても暑いです, そのほとんどは BLDC によって駆動されます.
