

Comprendere le nozioni di base sui motori passo-passo
Introduzione
Un motore passo-passo è un dispositivo elettromagnetico che converte i segnali di impulso elettrico in spostamento angolare o lineare. Questo tipo di motore è molto diffuso nel campo del controllo automatizzato per la sua precisione di controllo e per il vantaggio di non richiedere un sistema di feedback. Questo articolo introdurrà i concetti di base, principi di funzionamento, tipi, e applicazioni dei motori passo-passo ai principianti.
Cos'è un motore passo -passo?
Un motore passo-passo è un tipo di motore a controllo digitale che controlla la rotazione del motore attraverso segnali digitali. Ogni impulso elettrico fa ruotare il motore di un angolo fisso, noto come angolo di passo. Questa caratteristica di motori passo-passo li rende molto utili in situazioni che richiedono un controllo preciso della posizione.
Principio di funzionamento dei motori passo-passo
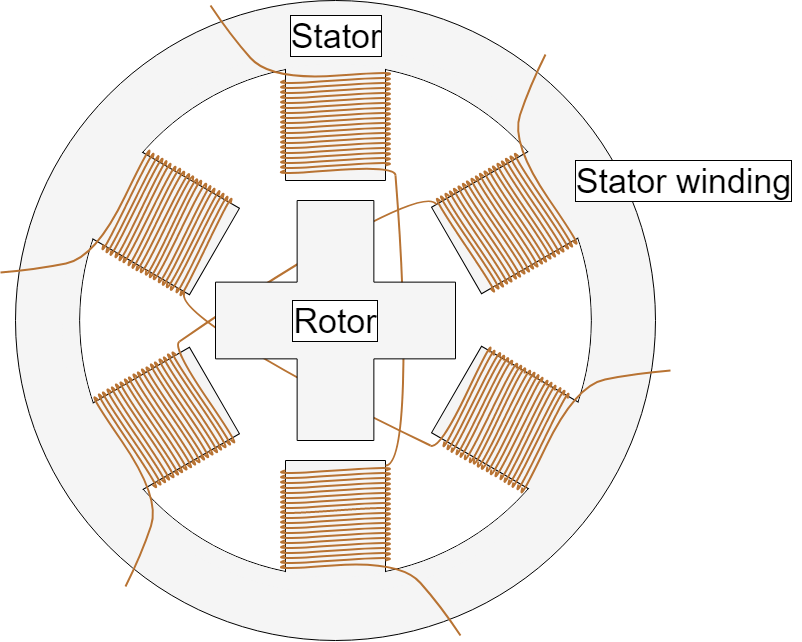
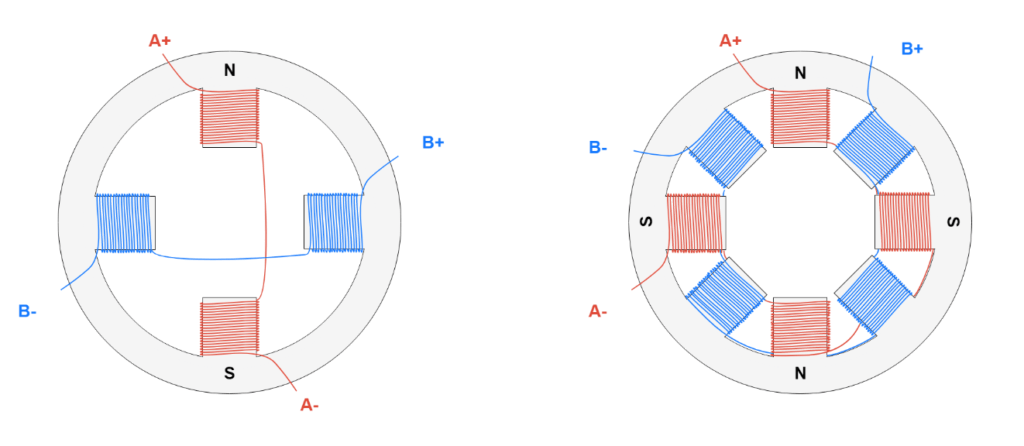
Come tutti i motori, i motori passo-passo comprendono anche una parte fissa (Statore) e una parte mobile (rotore). Lo statore ha una sporgenza a forma di ingranaggio con bobine di avvolgimento, mentre il rotore è un magnete permanente o un nucleo a riluttanza variabile. Esamineremo le diverse strutture del rotore in modo più approfondito in seguito. Figura 1 mostra una sezione trasversale del motore con un rotore a nucleo a riluttanza variabile.
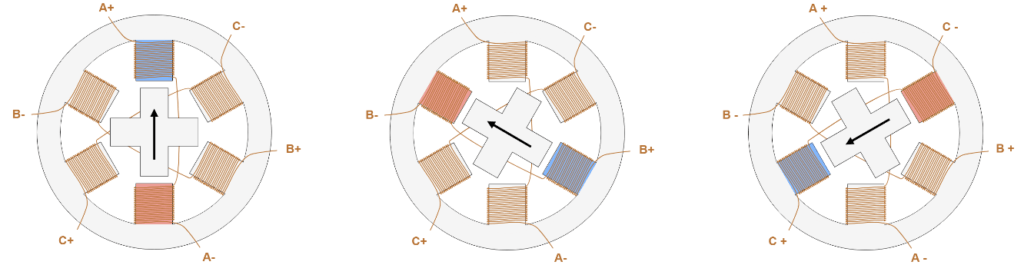
Il principio di funzionamento di base del motore passo-passo è: viene eccitata la fase di uno o più statori, la corrente che passa attraverso la bobina genererà un campo magnetico, e il rotore sarà allineato con il campo magnetico; Applicazione della tensione a fasi diverse a turno, il rotore ruoterà ad un angolo specifico e alla fine raggiungerà la posizione desiderata.
Figura 2 mostra come funziona. Primo, la bobina A è eccitata e genera un campo magnetico, con cui è allineato il rotore; Dopo che la bobina B è eccitata, il rotore viene ruotato di 60° in senso orario per allinearsi al nuovo campo magnetico; La stessa cosa accade quando la bobina C è accesa. Il colore dei denti dello statore nella figura seguente indica la direzione del campo magnetico generato dagli avvolgimenti dello statore.
Tipo e costruzione del motore passo-passo
Le prestazioni del motore passo-passo (se si tratta di risoluzione/passo, velocità o coppia) è influenzato dai dettagli della costruzione, e allo stesso tempo, questi dettagli possono anche influenzare il modo in cui viene controllato il motore. Infatti, non tutti i motori passo-passo hanno la stessa struttura interna (o costruzione), perché motori diversi hanno configurazioni diverse di rotore e statore.
Rotore
I motori passo-passo hanno fondamentalmente tre tipi di rotori:
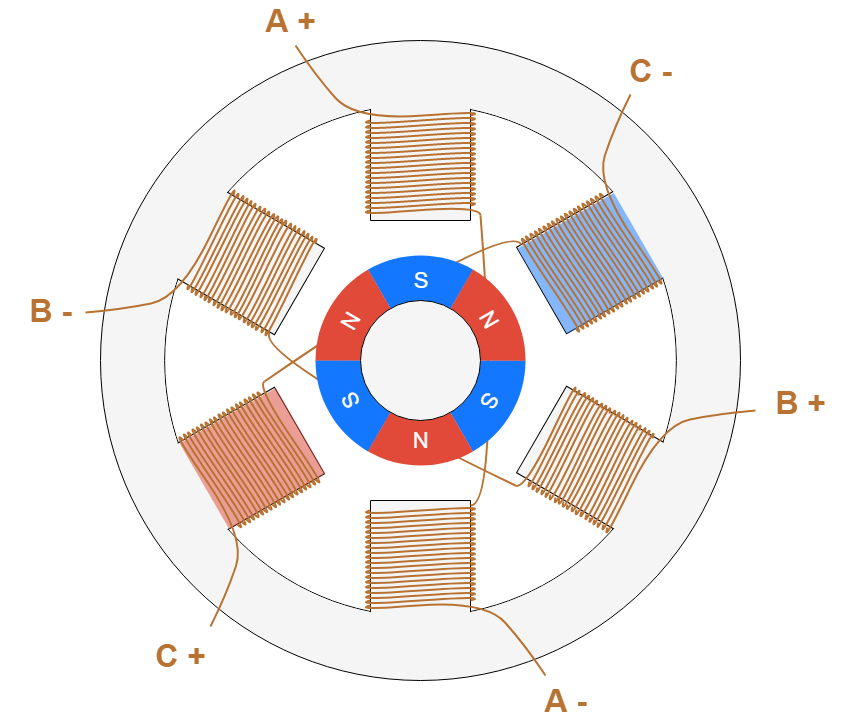
- Rotore a magnete permanente: Il rotore è un magnete permanente, allineato con il campo magnetico generato dal circuito dello statore. Questo rotore garantisce una buona coppia ed è dotato di coppia frenante. Ciò significa che indipendentemente dal fatto che la bobina sia eccitata o meno, il motore può resistere (anche se non in modo molto forte) cambiamenti di posizione. Tuttavia, rispetto ad altri tipi di rotori, il suo svantaggio è che sia la velocità che la risoluzione sono inferiori. Figura 3 mostra una sezione trasversale di un motore passo-passo a magnete permanente.
- Rotore a riluttanza variabile: Il rotore è costituito da un nucleo di ferro e ha una forma speciale che può essere allineata al campo magnetico (vedere Figure 1 E 2). Questo rotore è più facile da raggiungere ad alta velocità e alta risoluzione, ma la coppia che produce è generalmente inferiore e non c'è coppia frenante.
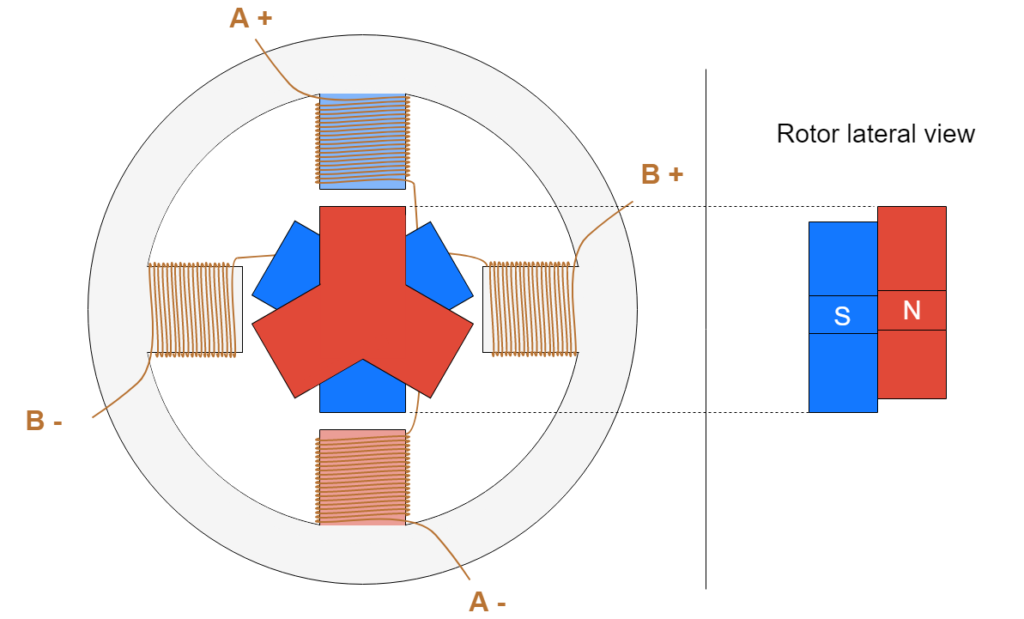
- Rotore ibrido: Questo rotore ha una struttura speciale, è un ibrido tra magnete permanente e rotore a riluttanza variabile. Sul rotore sono presenti due cappucci magnetici magnetizzati assialmente, e ci sono piccoli denti alternati sui cappucci magnetici. Questa configurazione offre al motore i vantaggi sia del rotore a magnete permanente che a riluttanza variabile, soprattutto con l'alta risoluzione, alta velocità e coppia elevata. Ovviamente, requisiti di prestazione più elevati significano strutture più complesse e costi più elevati. Figura 3 mostra un diagramma schematico semplificato di questa struttura del motore. Quando la bobina A è eccitata, un dentino della calotta magnetica del rotore N è allineato con il dente dello statore della calotta magnetica S. Allo stesso tempo, a causa della struttura del rotore, la calotta magnetica del rotore S è allineata con i denti dello statore di magnetizzazione N. Sebbene il principio di funzionamento del motore passo-passo sia lo stesso, la struttura del motore vero e proprio è più complessa, e il numero di denti è superiore a quello mostrato in figura. Un gran numero di denti consente al motore di ottenere un angolo di passo molto piccolo, piccolo quanto 0,9°.
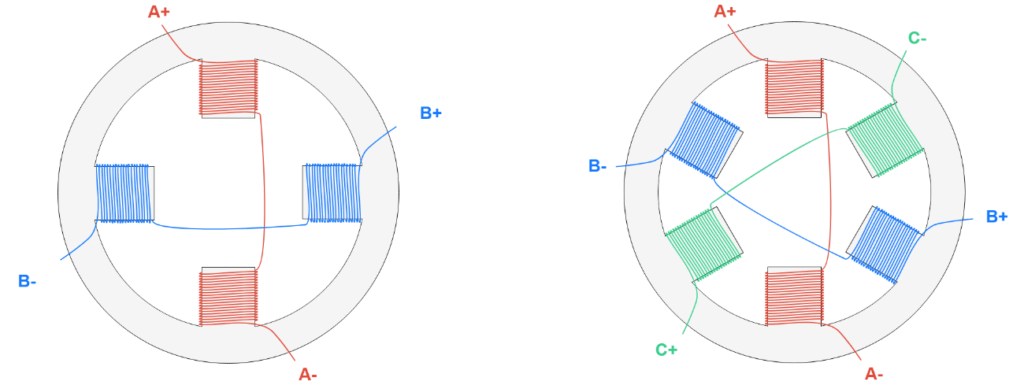
Statore
Lo statore è la parte del motore responsabile della generazione del campo magnetico con cui è allineato il rotore. Le principali caratteristiche del circuito statorico sono legate al suo numero di fase, numero di poli e configurazione dei fili. Il numero di fasi è il numero di bobine indipendenti, e il numero di poli rappresenta la coppia di denti principale occupata da ciascuna fase. I motori passo-passo bifase sono quelli più comunemente utilizzati, mentre i motori trifase e cinquefase sono meno comunemente usati (vedere Figure 5 E 6).
Caratteristiche dei motori passo-passo
- Controllo preciso: I motori passo-passo possono controllare con precisione angoli e velocità.
- Non c'è bisogno di feedback: A causa del loro principio di funzionamento, motori passo-passo di solito non richiedono un sistema di feedback della posizione.
- Facile da controllare: I motori passo-passo possono essere controllati tramite semplici segnali a impulsi.
- Coppia elevata a basse velocità: A basse velocità, i motori passo-passo possono fornire una coppia elevata.
Applicazioni dei motori passo-passo
Motori passo-passo sono ampiamente utilizzati in vari campi, incluso ma non limitato a:
- Macchinari automatizzati: Per un controllo preciso della posizione dei bracci meccanici.
- Stampanti e scanner: Per controllare il movimento delle testine di stampa e di scansione.
- Robotica: Per controllare il movimento dei giunti del robot.
- Attrezzature mediche: In alcuni dispositivi medici di precisione per controllare il movimento preciso dei componenti.
Come scegliere un motore passo-passo?
Quando selezionando un motore passo-passo, considerare i seguenti fattori:
- Requisiti di coppia: Scegliere la coppia appropriata in base ai requisiti di carico e velocità dell'applicazione.
- Angolo del passo: Minore è l'angolo di passo, maggiore è la risoluzione del motore, e più fine è il controllo.
- Velocità: Scegliere un intervallo di velocità adatto in base alle esigenze dell'applicazione.
- Dimensioni e forma: Scegliere la dimensione del motore appropriata in base allo spazio di installazione e ai requisiti di progettazione.
Conclusione
Motori passo-passo sono versatili e adatti per applicazioni che richiedono un controllo preciso. Attraverso questa introduzione, i principianti dovrebbero avere una conoscenza di base dei motori passo-passo ed essere in grado di iniziare a esplorare il loro potenziale in varie applicazioni. Con il continuo progresso della tecnologia, anche il campo di applicazione dei motori passo-passo è in continua espansione, fornendo un forte supporto per l’automazione moderna e il controllo di precisione.
Greensky Power Co., srl. è un produttore professionista impegnato nella ricerca, sviluppo, produzione, vendita di motori passo-passo.
Se stai cercando Motore passo-passo per il tuo progetto, si prega di contattare il nostro team di vendita.

