
Nozioni di base sui motori CC senza spazzole-BLDC — TMC4671-LA
Quando si tratta di motori DC Brushless, È necessario menzionare il motore a pennello. I motori a pennello hanno uno svantaggio piuttosto fastidioso: questo è “rumoroso”.
Perché i pennelli e l'anello di commutazione devono costantemente attrito, Per alimentare l'armatura.
COSÌ, Se vuoi un “Fan silenzioso”, Non puoi certamente scegliere l'uso dei prodotti del motore a pennello.
E i pennelli hanno maggiori probabilità di essere danneggiati dopo molto tempo. Quando la corrente è alta, Puoi persino vedere i pennelli scoppiettanti e scintillanti quando si cambia direzione.
Nessuno di questi svantaggi si trova nel Motore DC Brushless DC-BLDC che introdurremo di seguito!
Presenteremo il pennello DC Motor-Bldc (BLDC in breve) Dai seguenti quattro aspetti.
1, I vantaggi e gli svantaggi di BLDC.
2, Il principio di lavoro di BLDC.
3, La modalità di controllo di BLDC.
4, L'uso effettivo di BLDC.
1、Vantaggi e svantaggi di BLDC
Motore CC senza spazzole, letteralmente, La sua più grande caratteristica è “senza spazzole”, Il che significa nessun pennello.
Perché non c'è pennello, È molto perfetto per evitare le diverse carenze del motore a spazzola. Quindi a sua volta, I suoi principali vantaggi sono.
1, lunga vita; 2, può essere silenzioso; 3, alta efficienza (bassa perdita); 4, dimensioni più piccole; 5, alta stabilità.
- 1. I motori DC Brushless funzionano in una vasta gamma di velocità, a qualsiasi velocità, può essere eseguito a pieno potere.
- 2. Capacità di sovraccarico eccezionale e alta efficienza operativa.
- 3. Il motore a cc Brushless è più piccolo, Gamma più ampia di applicazione e una maggiore densità di potenza rispetto al motore a spazzola.
- 4. Rispetto al controllo dell'unità del motore asincrono, L'unità è più semplice.
- 5. Il motore a cc senza spazzole non ha una struttura del commutatore meccanico ed è chiuso all'interno, che può evitare che le particelle di polvere di volo entrano nell'interno del motore e portano a vari problemi e ad alta affidabilità.
- 6. Le caratteristiche esterne sono migliori, Funzionamento a bassa velocità, può produrre una coppia di grandi dimensioni, può fornire una coppia di partenza relativamente grande.
Svantaggi di BLDC
Torniamo alla domanda lasciata davanti: Quali sono gli svantaggi di BLDC?
Credo che tu abbia già indovinato: Abbiamo speso così tanto spazio per parlare del metodo di controllo di BLDC, abbastanza per vedere la difficoltà del suo controllo, Rispetto al motore della spazzola, è molto più alto!
Quindi il più grande svantaggio di BLDC è la sua alta difficoltà di controllo e il prezzo elevato di guida ESC (Controllo della velocità elettronica, ESC in breve).
Ha anche uno svantaggio che il BLDC a causa della resistenza induttiva, L'inizio sarà accompagnato da jitter, A differenza del motore a pennello inizia così liscio.
Attualmente, Esistono tre metodi di controllo del motore senza spazzole tradizionali come segue.
1、Controllo delle onde quadrate.
Noto anche come controllo delle onde trapezoidali, 120° Controllo, 6-Passo Controllo della commutazione
Il metodo di controllo delle onde quadrate ha il vantaggio di semplici algoritmi di controllo, Bassi costi hardware, l'uso delle prestazioni ordinarie del controllore sarà in grado di ottenere un'alta velocità del motore.
Lo svantaggio è che la fluttuazione della coppia è grande, C'è una certa quantità di rumore di corrente, e l'efficienza non raggiunge il massimo. Il controllo dell'onda quadra è adatto per applicazioni che non richiedono alte prestazioni di rotazione del motore.
Il controllo delle onde quadrate utilizza un sensore di sala o un algoritmo di stima senza sensori per ottenere la posizione del rotore del motore, e poi esegue sei commutazioni (uno ogni 60 °) in base alla posizione del rotore all'interno di un ciclo elettrico a 360 °.
Ad ogni posizione di commutazione il motore emette una forza in una direzione specifica, Quindi si può dire che l'accuratezza della posizione del controllo dell'onda quadra è elettrica 60 °.
Poiché la forma d'onda di corrente di fase del motore è vicina all'onda quadrata in questo modo di controllo, Si chiama controllo delle onde quadrate.

2、Controllo dell'onda sinusoidale.
Il metodo di controllo delle onde sinusoidali utilizza l'onda SVPWM, e l'uscita è una tensione d'onda sinusoidale, e la corrente corrispondente è anche una corrente di onda sinusoidale.
Questo metodo non ha il concetto di commutazione di controllo delle onde quadrate, o pensare che un ciclo elettrico in un numero infinito di commutazione.
Ovviamente, Rispetto al controllo delle onde quadrate, Il controllo delle onde sinusoidali ha meno fluttuazioni della coppia e meno armoniche di corrente, Il che fa sentire di più il controllo “delicato”, ma i requisiti di prestazione del controllore sono leggermente più alti del controllo delle onde quadrate, e l'efficienza del motore non può essere massimizzata.
3、Controllo FOC

Noto anche come conversione della frequenza vettoriale, Controllo direzionale del vettore del campo magnetico
Il controllo delle onde sinusoidali realizza il controllo del vettore di tensione, si realizza indirettamente il controllo della dimensione corrente, ma non può controllare la direzione della corrente.
Il metodo FOC Control può essere considerato come una versione aggiornata di sinuso alle onde, che realizza il controllo dell'attuale vettore, cioè., Il controllo vettoriale del campo dello statore del motore.
Poiché la direzione del campo dello statore è controllata, Il campo dello statore e il campo del rotore possono essere mantenuti a 90 ° in ogni momento, e può essere raggiunto l'uscita di coppia massima a una determinata corrente.
I vantaggi del metodo FOC Control sono: Fluttuazione della coppia bassa, alta efficienza, Rumore basso e risposta dinamica rapida.
Gli svantaggi sono: Costo hardware più elevato, Requisiti più elevati per le prestazioni del controller, e i parametri del motore devono essere abbinati.
FOC è attualmente la scelta migliore per il controllo efficiente dei motori DC Brushless (BLDC) e motori sincroni a magneti permanenti (PMSM).
FOC controlla con precisione l'entità e la direzione del campo magnetico, che rende liscia la coppia del motore, rumore basso, alta efficienza, e ha una risposta dinamica ad alta velocità.
A causa degli ovvi vantaggi di FOC, Molte aziende stanno ora sostituendo gradualmente il controllo dei prodotti tradizionali con FOC per numerose applicazioni.
Germania Trinamic ha un chip di controllo servo con controllo del vettore di campo magnetico (Foc) — TMC4671-LA
– Modalità di controllo della coppia
– Modalità di controllo della velocità
– Modalità di controllo della posizione
– Frequenza di aggiornamento del controllo corrente e frequenza PWM massima di 100kHz (La frequenza di aggiornamento per la velocità e il controllo della posizione possono essere configurati come multiplo della frequenza di aggiornamento corrente corrente)

Il TMC4671 è un chip di controllo servo completamente integrato che fornisce il controllo direzionale del campo magnetico per i motori DC senza spazzole, motori sincroni a magnete permanente, 2-motori a passo successivo, Motori DC spazzolati e motori a bobina vocale.
Tutte le funzioni di controllo sono integrate nell'hardware. Con ADC integrati, Interfaccia del sensore di posizione, e differenziale di posizione, Questo servo controller a pieno titolo è adatto a una varietà di servomo.
2、Il principio di lavoro di BLDC
BLDC è una specie di motore, Quindi la sua composizione più elementare è inseparabile dallo statore e dal rotore.
Lo statore di un motore a pennello è un magnete permanente, mentre il suo rotore è una bobina energizzata (tornante). Come mostrato nella figura seguente.

Ma per il BLDC, è vero il contrario!
Lo statore (Statore) di un BLDC è una bobina energizzata, Mentre il rotore è un magnete permanente!

Da “La legge di Maxwell-Ampere”, Possiamo sapere che lo spazio vicino alla bobina energizzata genererà un campo magnetico. E la direzione della distribuzione del campo magnetico, Possiamo usare il “Regola di destra” per derivare.
Infatti, Questo è ciò che chiamiamo spesso “elettromagnete”!
Allora la prossima cosa è semplice, Quali sono le proprietà dei magneti?
Lo stesso sesso si respinge a vicenda, Il sesso opposto si attira a vicenda!
COSÌ, Dobbiamo solo dare alla bobina sullo statore per accedere alla direzione appropriata della corrente, questo è, in modo che i poli magnetici della direzione elettromagnet.
COSÌ, Dobbiamo solo collegare la bobina sullo statore alla direzione appropriata della corrente, questo è, Lascia che la direzione dei poli magnetici dell'elettromagnete e la direzione dei poli magnetici del magnete permanente corrispondano esattamente, non essere in grado di respingere, o attirare il rotore per fare un movimento rotazionale.
Ottimizzazione dello statore
Il metodo di guida sopra, cioè. energizzare ogni bobina singolarmente in sequenza, è fattibile ma troppo ingombrante e inefficiente.
Perciò, L'attuale BLDC combinerà quelle sei bobine due per due e le dividerà in tre avvolgimenti, UN, B, e c, come segue.

In questo modo possiamo guidare due elettromagneti contemporaneamente, che raddoppia immediatamente l'efficienza.
Ma questo è solo con il magnete “attrazione” caratteristiche, Non dimenticare che anche il magnete “repulsione” caratteristiche.
Se guidiamo un'altra serie di bobine contemporaneamente, in modo che il set precedente di bobine “attirare” il rotore quando l'altra serie di bobine “respingere” il rotore, Quindi il nostro rotore otterrà una forza trainante!
Finora, Questo modello ha iniziato ad avvicinarsi al prodotto BLDC reale.
Ma per il modello sopra
Tuttavia, per il modello sopra, Dobbiamo fornire due avvolgimenti con due serie di potenza in direzioni opposte per raggiungere l'effetto di “attrazione” E “repulsione” allo stesso tempo.
Questo è troppo complicato e costoso per le applicazioni pratiche.
Successivamente parleremo del “Metodo di controllo BLDC”, che risolverà il problema sopra.
3、Metodo di controllo di BLDC
L'originale a, B, C Tre avvolgimenti sono indipendenti, Quindi è molto problematico controllarli.
Quindi se colleghiamo i tre avvolgimenti di a,B,C insieme e metti insieme a “disposizione a stella”, quello che sarà il risultato?

Originariamente tre avvolgimenti, che porta a sei righe; ora portano alla linea ridotta solo a tre linee, Quindi come ottenere lo stesso effetto di controllo con sei righe così connesse?
La seguente figura.
Il lato positivo dell'alimentazione è collegato all'angolo in alto a destra dell'ingresso di avvolgimento, mentre il lato negativo dell'alimentazione è collegato all'angolo in basso a sinistra dell'uscita dell'avvolgimento B.
Questa volta viene guidato un avvolgimento e l'avvolgimento B allo stesso tempo, E la sua polarità è esattamente opposta, per ottenere lo stesso effetto quando i tre avvolgimenti vengono guidati in modo indipendente!
Quindi, seguendo questa sequenza: AB-AC-BC-BA-CA-CB, I sei battiti, e pedalare gli avvolgimenti dello statore a loro volta, Il rotore può continuare a ruotare!
Sei interruttori elettronici possono essere utilizzati per guidare questi sei battiti, come segue.
Rilevamento della posizione
Anche se sappiamo già come controllare i sei battiti del rotore.
Ma hai trovato un nuovo problema: Se non conosci la posizione del rotore, Come fai a sapere quando guidare quale avvolgimento?
Quindi dobbiamo conoscere la posizione attuale del rotore!
E la posizione del rotore viene rilevata in due modi generali.
1, Metodo di rilevamento del sensore Hall.
La seguente figura, Inserire lo statore H1, H2, H3, Tre sensori della sala, Puoi conoscere l'attuale posizione esatta dello statore.
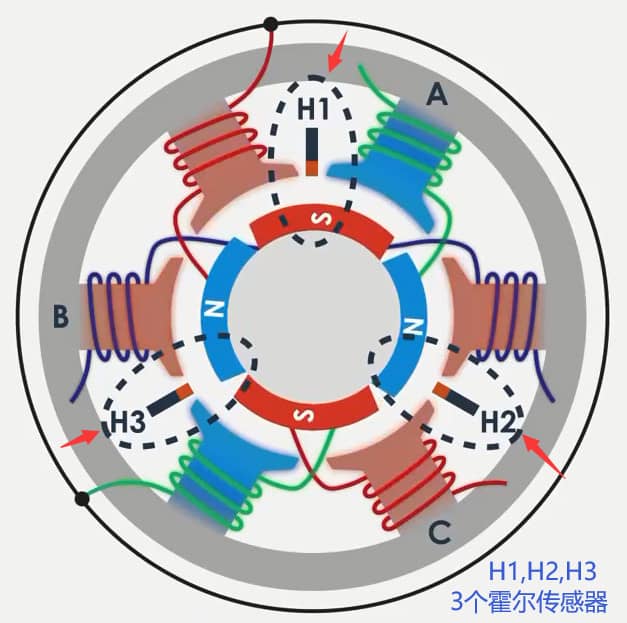
Hall Sensor Output con livelli alti e bassi per indicare.

2, Metodo di rilevamento della forza elettromotrice inversa
Il metodo di rilevamento EMF back si basa sul principio di induzione elettromagnetica.
Quando il campo magnetico (Flusso magnetico) intorno a un cambio di avvolgimento non energizzato, Un potenziale elettrico è indotto in questo avvolgimento.
Rilevando l'entità e la direzione di questo potenziale elettrico, Possiamo anche conoscere l'attuale posizione dello statore.

Questi due metodi di rilevamento hanno i loro vantaggi e svantaggi.
Il rilevamento del sensore Hall è un po 'più accurato, ma anche più costoso.
Al contrario, Il metodo di rilevamento della forza elettromotrice inversa è più economico, ma leggermente meno accurato.
Rotore interno o rotore esterno
BLDC ha due tipi di struttura: Il rotore all'interno è chiamato rotore interno bldc; anzi, Il rotore esterno è chiamato rotore esterno BLDC.

Relativamente parlando, Il rotore esterno BLDC viene utilizzato più spesso.
Il motivo principale è che il rotore esterno BLDC è più stabile nella struttura meccanica. Questo perché il rotore del motore ha la tendenza ad espandersi verso l'esterno a causa della forza centrifuga sotto il funzionamento ad alta velocità.
Quindi il rotore interno BLDC ha bisogno di una precisione meccanica molto elevata per garantire che il rotore e lo statore non combatteranno.
Ma se la distanza riservata è troppo lontana, Porterà a perdite magnetiche e influenzerà l'efficienza complessiva del motore.
Ma questo non è un problema con il rotore esterno BLDC, Perché il rotore esterno non è naturalmente influenzato dall'espansione.
4、L'applicazione pratica di BLDC
Allora diamo un'occhiata al prossimo, Gli scenari di applicazione effettivi di BLDC.
1, Il raffreddamento dell'aria della ventola di raffreddamento silenzioso è la prima scelta per molti dispositivi raffreddamento.
Per esempio, molti dei principali “silenzioso” telaio sul mercato, Se l'uso del raffreddamento dell'aria, La ventola di raffreddamento all'interno è fondamentalmente l'uso di BLDC.
La base utilizzata per dissipare il calore nel laptop è anche comunemente usata BLDC, Oltre ad un grande sistema di raffreddamento di ventilazione all'interno, l'uso dei fan di BLDC. Ci sono anche soffianti ad aria ad alta velocità e altri prodotti.
2, I droni a più assi sono utilizzati in Power BLDC più grande, adattato all'ESC appropriato (ESC), e quindi utilizzare PWM per controllare la velocità BLDC è molto conveniente.

3, Utensili elettrici e altri prodotti, come lotti elettrici, La produzione interna di chiavi elettriche è sostanzialmente utilizzata BLDC, E anche la maggior parte del trapano a mano.
Principalmente a causa dell'elevata efficienza di BLDC, e far durare più a lungo gli utensili alimentati a batteria. Un altro punto è che l'uscita di coppia del motore senza spazzole è molto stabile.
Ci sono anche compressori del frigorifero, Ventile di raffreddamento del congelatore, così come i depuratori d'aria, aspirapolvere/spazzatrici, pistole fascia, eccetera., che sono molto caldi negli ultimi anni, la maggior parte dei quali è guidata da BLDC.
