
Quels sont 5 types de moteurs de commande?
Comme nous le savons tous, le moteur est une partie importante du système d’entraînement et de contrôle. Avec le développement de la science et de la technologie modernes, l'intérêt du moteur dans les applications pratiques a commencé à passer d'un simple entraînement à un contrôle complexe; Surtout le contrôle précis de la vitesse, position et couple du moteur. Cependant, les moteurs ont une conception et des modes d'entraînement différents selon les différentes applications.
À première vue, il semble que la sélection du type soit très complexe. Donc, pour les personnes, la classification de base est établie en fonction de la fonction des moteurs rotatifs. Suivant, nous ferons un “Recensement de la population” pour la grande famille des moteurs, et introduire progressivement les plus représentatifs, moteur le plus couramment utilisé et de base dans le moteur – moteur de commande.
Moteur de commande
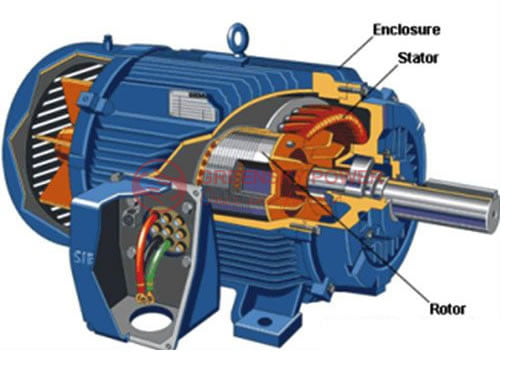
Le moteur de contrôle est principalement utilisé pour un contrôle précis de la vitesse et de la position., et est utilisé comme “actionneur” dans le système de contrôle. Il peut être divisé en servomoteur, moteur pas à pas, moteur couple, moteur à réluctance commutée, Moteur sans balais à courant continu, etc..

1. Servomoteur
Servomoteurs sont largement utilisés dans divers systèmes de contrôle. Ils peuvent convertir le signal de tension d'entrée en sortie mécanique sur l'arbre du moteur et faire glisser les composants contrôlés pour atteindre l'objectif de contrôle.. En général, le servomoteur nécessite que la vitesse du moteur soit contrôlée par le signal de tension appliqué; La vitesse de rotation peut changer continuellement avec le changement du signal de tension appliqué; Le couple peut être contrôlé par la sortie de courant du contrôleur; Le moteur doit avoir une réponse rapide, petit volume et petite puissance de contrôle. Les servomoteurs sont principalement utilisés dans divers systèmes de contrôle de mouvement, en particulier les systèmes d'asservissement.
Il existe des servomoteurs DC et AC. Le premier servomoteur est un moteur à courant continu général. En cas de faible précision de contrôle, le moteur à courant continu général est utilisé comme servomoteur. Maintenant, avec le développement rapide de la technologie des moteurs synchrones à aimants permanents, la plupart des servomoteurs font référence à des servomoteurs synchrones à aimant permanent AC ou à des moteurs DC sans balais.

2. Moteur pas à pas
Le moteur pas à pas est un actionneur qui convertit l'impulsion électrique en déplacement angulaire; Plus généralement, lorsque le pilote pas à pas reçoit un signal d'impulsion, il entraîne le moteur pas à pas pour qu'il tourne d'un angle fixe dans la direction définie. Nous pouvons contrôler le déplacement angulaire du moteur en contrôlant le nombre d'impulsions pour atteindre l'objectif d'un positionnement précis; En même temps, la vitesse et l'accélération du moteur peuvent être contrôlées en contrôlant la fréquence d'impulsion pour atteindre l'objectif de régulation de la vitesse. Maintenant, les moteurs pas à pas couramment utilisés comprennent les moteurs pas à pas réactifs (VR), moteurs pas à pas à aimant permanent (MP), moteurs pas à pas hybrides (HB) et moteurs pas à pas monophasés.
La différence entre un moteur pas à pas et un moteur ordinaire réside principalement dans la forme d'entraînement par impulsions. C'est précisément cette fonctionnalité que le moteur pas à pas peut être combiné avec la technologie de commande numérique moderne.. Cependant, le moteur pas à pas n'est pas aussi bon que le servomoteur CC à commande en boucle fermée traditionnel en termes de précision de contrôle, plage de variation de vitesse et performances à basse vitesse;

Donc, il est principalement utilisé dans des situations où l'exigence de précision n'est pas particulièrement élevée. En raison de sa structure simple, haute fiabilité et faible coût, les moteurs pas à pas sont largement utilisés dans divers domaines de pratique de production; Surtout dans le domaine de la fabrication de machines-outils à commande numérique, parce que le moteur pas à pas n'a pas besoin de conversion A/D et peut convertir directement le signal d'impulsion numérique en déplacement angulaire, il a été considéré comme le composant exécutif le plus idéal de la machine-outil à commande numérique.
En plus de l'application dans les machines-outils CNC, les moteurs pas à pas peuvent également être utilisés dans d'autres machines, comme les moteurs des machines d'alimentation automatiques, les moteurs en général les lecteurs de disquettes, et aussi dans les imprimantes et les traceurs.
En outre, le moteur pas à pas présente également de nombreux défauts; En raison de la fréquence de démarrage à vide du moteur pas à pas, le moteur pas à pas peut fonctionner normalement à basse vitesse, mais il ne peut pas démarrer si la vitesse est supérieure à une certaine vitesse, accompagné d'un cri aigu; La précision des entraînements de subdivision de différents fabricants peut varier considérablement, et plus la subdivision est grande, plus il est difficile de contrôler la précision; De plus, le moteur pas à pas a des vibrations et du bruit importants lorsqu'il tourne à basse vitesse.

3. Moteur couple
Le moteur dit couple est un moteur à courant continu à aimant permanent multipolaire plat. L'armature a plus de fentes, pièces de commutation et conducteurs en série pour réduire l'ondulation du couple et l'ondulation de la vitesse. Il existe deux types de moteurs couple: Moteur couple CC et moteur couple CA.
Parmi eux, la réactance auto-induite du moteur couple à courant continu est très faible, donc sa réponse est très bonne; Son couple de sortie est proportionnel au courant d'entrée et indépendant de la vitesse et de la position du rotor; Il peut se connecter directement à la charge et fonctionner à basse vitesse sans réduction de vitesse dans des conditions de rotor proche du verrouillage., il peut ainsi produire un rapport couple/inertie élevé sur l'arbre de charge et éliminer l'erreur du système causée par l'utilisation d'un réducteur.

Le moteur couple AC peut être divisé en synchrone et asynchrone. Maintenant, Le moteur couple asynchrone à cage d'écureuil est couramment utilisé, qui présente les caractéristiques d'une faible vitesse et d'un couple élevé. En général, Les moteurs couple AC sont souvent utilisés dans l'industrie textile. Leur principe de fonctionnement et leur structure sont les mêmes que ceux des moteurs asynchrones monophasés. Cependant, en raison de la grande résistance du rotor à cage d'écureuil, ses caractéristiques mécaniques sont relativement douces.

4. Moteur à réluctance commutée
Moteur à réluctance commutée (MRS) est un nouveau type de moteur de régulation de vitesse avec une structure extrêmement simple et solide, faible coût et excellentes performances de régulation de vitesse. Il s'agit d'un concurrent sérieux des moteurs de commande traditionnels et présente un fort potentiel de marché.. Mais à l'heure actuelle, il y a aussi des problèmes tels que l'ondulation du couple, bruit de fonctionnement et vibrations importantes, qui nécessitent un certain temps d'optimisation et d'amélioration pour s'adapter à l'application réelle du marché.
5. Moteur CC sans balais
Moteur CC sans balais (BLDC) est développé sur la base d'un moteur à courant continu sans balais, mais son courant d'entraînement est AC à la lettre; Le moteur à courant continu sans balais peut être divisé en moteur à vitesse sans balais et moteur à couple sans balais. En général, il existe deux types de courant d'entraînement du moteur sans balais, l'une est une onde trapézoïdale (en général “onde carrée”), et l'autre est une onde sinusoïdale. Parfois, le premier est appelé moteur sans balais à courant continu., et ce dernier s'appelle servomoteur AC, qui est exactement l'un des servomoteurs AC.
Afin de réduire le moment d'inertie, le moteur à courant continu sans balais adopte généralement un “mince” structure. Le moteur à courant continu sans balais est beaucoup plus petit en poids et en volume que le moteur à courant continu sans balais, et le moment d'inertie correspondant peut être réduit d'environ 40-50%. En raison du problème de traitement des matériaux à aimant permanent, la capacité générale du moteur à courant continu sans balais est inférieure à 100 kW.
Ce type de moteur présente une bonne linéarité des caractéristiques mécaniques et des caractéristiques de régulation, large plage de vitesse, longue durée de vie, entretien pratique et faible bruit, et n'a pas une série de problèmes causés par la brosse électrique, il a donc un grand potentiel d'application dans le système de contrôle.
Greensky Power Co., Ltd. est un fabricant professionnel engagé dans la recherche, développement, production, vente de moteurs de commande.
Si vous recherchez un moteur de contrôle pour votre projet, veuillez contacter notre équipe commerciale.
