
Comprendre les bases du moteur pas à pas
Introduction
Un moteur pas à pas est un dispositif électromagnétique qui convertit les signaux d'impulsion électrique en déplacement angulaire ou linéaire.. Ce type de moteur est très courant dans le domaine du contrôle automatisé en raison de sa commande précise et de l'avantage de ne pas nécessiter de système de retour d'information.. Cet article présentera les concepts de base, principes de travail, genres, et applications des moteurs pas à pas aux débutants.
Qu'est-ce qu'un moteur pas à pas?
Un moteur pas à pas est un type de moteur à commande numérique qui contrôle la rotation du moteur via des signaux numériques.. Chaque impulsion électrique fait tourner le moteur d'un angle fixe, connu sous le nom d'angle de pas. Cette caractéristique de moteurs pas à pas les rend très utiles dans les situations qui nécessitent un contrôle de position précis.
Principe de fonctionnement des moteurs pas à pas
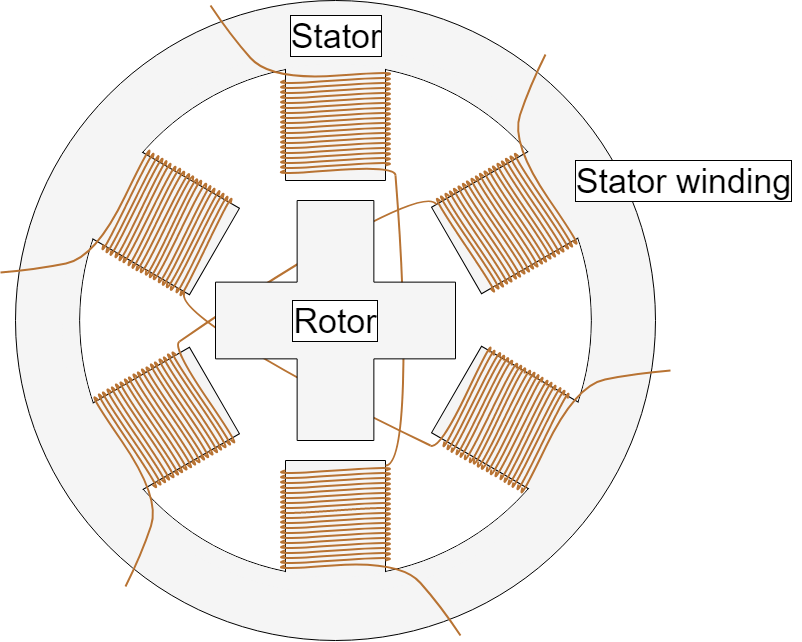
Comme tous les moteurs, les moteurs pas à pas comprennent également une partie fixe (stator) et une partie mobile (rotor). Le stator a une saillie en forme d'engrenage avec des bobines d'enroulement, tandis que le rotor est un aimant permanent ou un noyau à réluctance variable. Nous examinerons plus en profondeur les différentes structures du rotor plus tard.. Chiffre 1 montre une coupe transversale du moteur avec un rotor central à réluctance variable.
Le principe de fonctionnement de base du moteur pas à pas est: la phase d'un ou plusieurs stators est excitée, le courant traversant la bobine va générer un champ magnétique, et le rotor sera aligné avec le champ magnétique; Appliquer une tension à différentes phases tour à tour, le rotor tournera à un angle spécifique et atteindra éventuellement la position souhaitée.
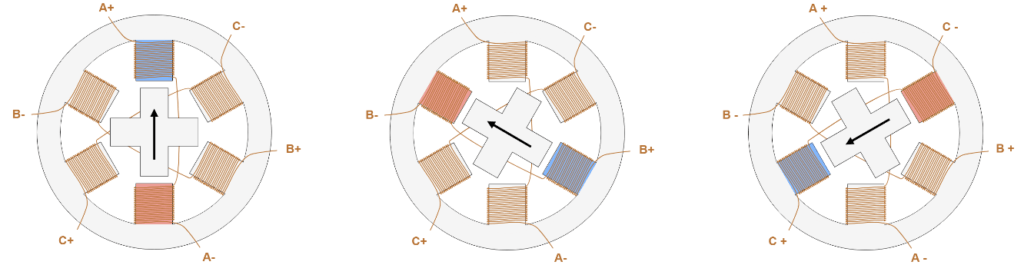
Chiffre 2 montre comment cela fonctionne. D'abord, la bobine A est alimentée et génère un champ magnétique, avec lequel le rotor est aligné; Après la mise sous tension de la bobine B, le rotor tourne de 60° dans le sens des aiguilles d'une montre pour s'aligner avec le nouveau champ magnétique; La même chose se produit lorsque la bobine C est allumée. La couleur des dents du stator dans la figure ci-dessous indique la direction du champ magnétique généré par les enroulements du stator.
Type et construction du moteur pas à pas
Les performances du moteur pas à pas (que ce soit la résolution/l'étape, vitesse ou couple) est affecté par les détails de la construction, et en même temps, ces détails peuvent également affecter la façon dont le moteur est contrôlé. En fait, tous les moteurs pas à pas n'ont pas la même structure interne (ou un chantier), parce que différents moteurs ont des configurations de rotor et de stator différentes.
Rotor
Les moteurs pas à pas ont essentiellement trois types de rotors:
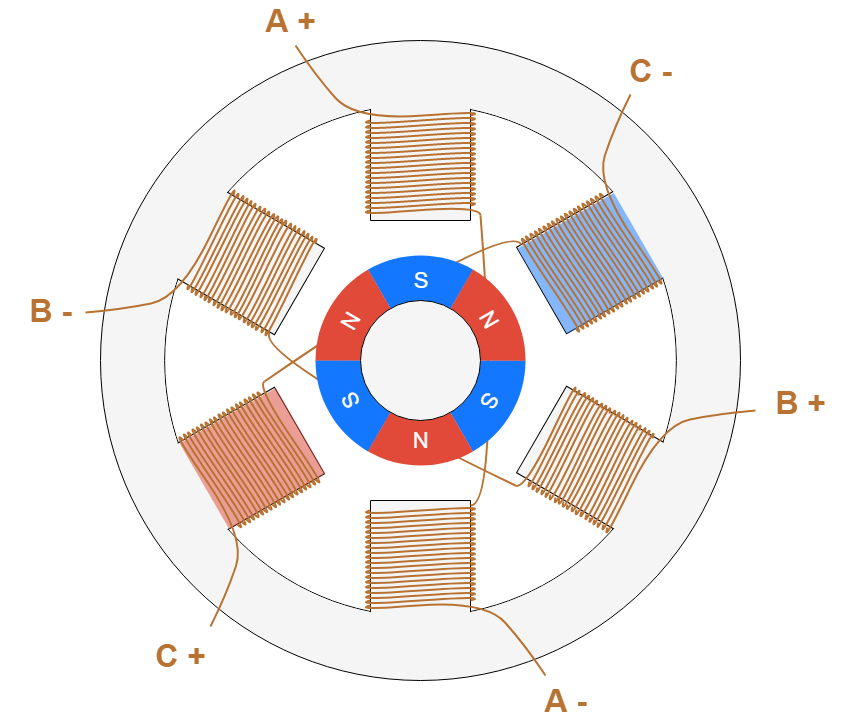
- Rotor à aimant permanent: Le rotor est un aimant permanent, aligné avec le champ magnétique généré par le circuit statorique. Ce rotor garantit un bon couple et possède un couple de freinage. Cela signifie que peu importe si la bobine est sous tension ou non, le moteur peut résister (même si pas très fortement) changements de position. Cependant, par rapport aux autres types de rotor, son inconvénient est que la vitesse et la résolution sont inférieures. Chiffre 3 montre une coupe transversale d'un moteur pas à pas à aimant permanent.
- Rotor à réluctance variable: Le rotor est constitué d'un noyau de fer et a une forme spéciale qui peut être alignée avec le champ magnétique (voir les chiffres 1 et 2). Ce rotor est plus facile à atteindre des vitesses élevées et une haute résolution, mais le couple qu'il produit est généralement plus faible et il n'y a pas de couple de freinage.
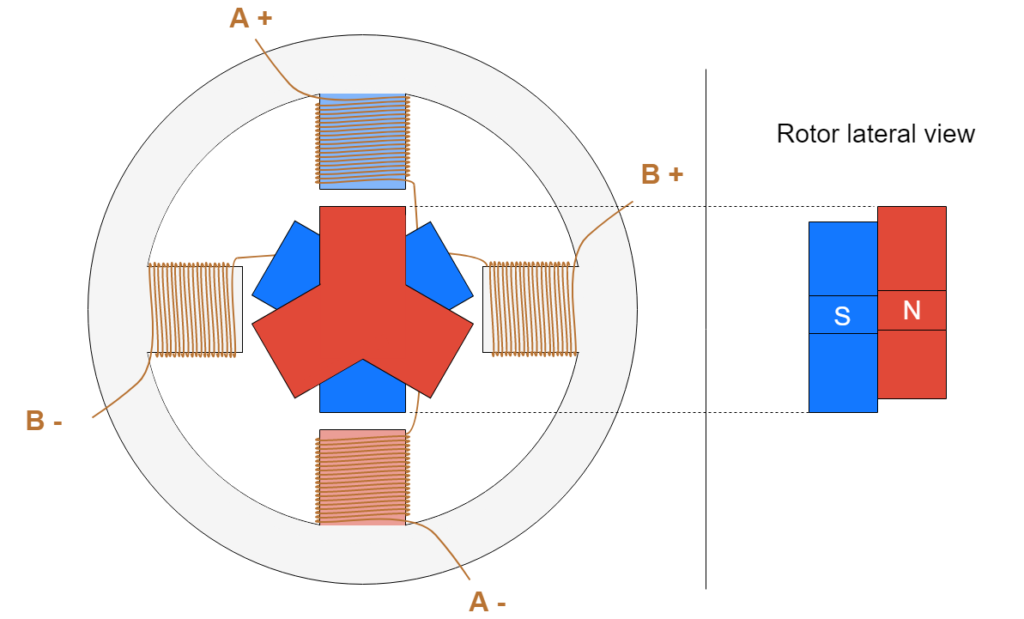
- Rotor hybride: Ce rotor a une structure spéciale, c'est un hybride d'aimant permanent et de rotor à réluctance variable. Il y a deux capuchons magnétiques magnétisés axialement sur le rotor, et il y a des petites dents alternées sur les capuchons magnétiques. Cette configuration confère au moteur les avantages d'un rotor à aimant permanent et à réluctance variable., surtout en haute résolution, haute vitesse et couple élevé. Bien sûr, des exigences de performance plus élevées signifient des structures plus complexes et des coûts plus élevés. Chiffre 3 montre un diagramme schématique simplifié de cette structure de moteur. Lorsque la bobine A est sous tension, une petite dent du capuchon magnétique du rotor N est alignée avec la dent du stator du S magnétisé. En même temps, en raison de la structure du rotor, le capuchon magnétique du rotor S est aligné avec les dents du stator d'aimantation N. Bien que le principe de fonctionnement du moteur pas à pas soit le même, la structure du moteur réel est plus complexe, et le nombre de dents est supérieur à celui indiqué sur la figure. Un grand nombre de dents permet au moteur d'obtenir un très petit angle de pas, aussi petit que 0,9°.
Stator
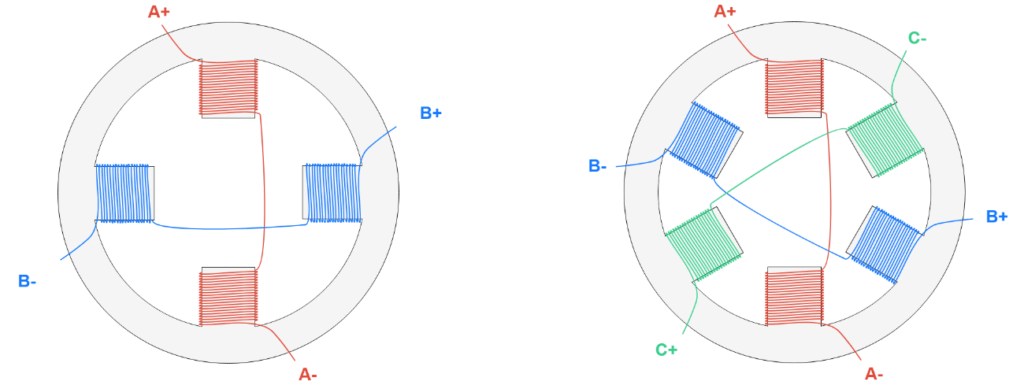
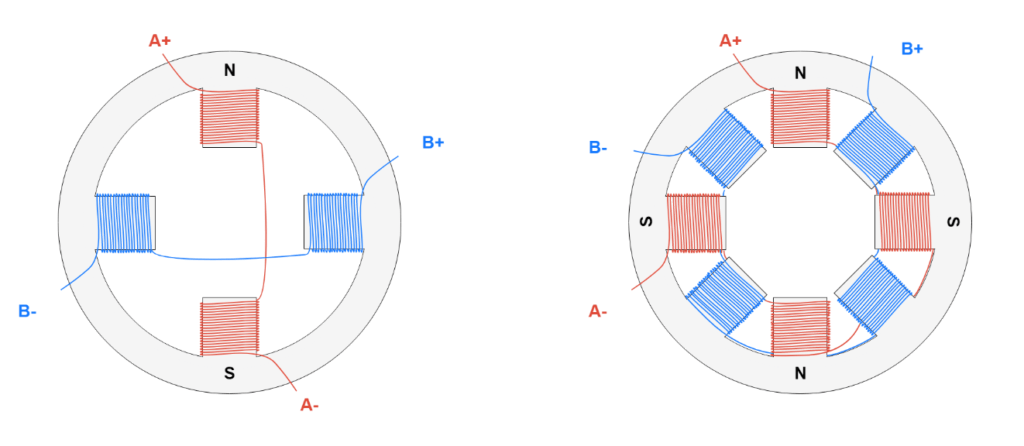
Le stator est la partie du moteur chargée de générer le champ magnétique avec lequel le rotor est aligné.. Les principales caractéristiques du circuit statorique sont liées à son numéro de phase, numéro de pôle et configuration des fils. Le nombre de phases est le nombre de bobines indépendantes, et le nombre de pôles représente la paire de dents principale occupée par chaque phase. Les moteurs pas à pas biphasés sont les plus couramment utilisés, tandis que les moteurs triphasés et triphasés sont moins couramment utilisés (voir les chiffres 5 et 6).
Caractéristiques des moteurs pas à pas
- Contrôle précis: Les moteurs pas à pas peuvent contrôler avec précision les angles et les vitesses.
- Pas besoin de commentaires: En raison de leur principe de fonctionnement, moteurs pas à pas ne nécessitent généralement pas de système de rétroaction de position.
- Facile à contrôler: Les moteurs pas à pas peuvent être contrôlés via de simples signaux d'impulsion.
- Couple élevé à basse vitesse: À basse vitesse, les moteurs pas à pas peuvent fournir un couple important.
Applications des moteurs pas à pas
Moteurs pas à pas sont largement utilisés dans divers domaines, y compris, mais sans s'y limiter:
- Machines automatisées: Pour un contrôle précis de la position des bras mécaniques.
- Imprimantes et scanners: Pour contrôler le mouvement des têtes d'impression et des têtes de numérisation.
- Robotique: Pour contrôler le mouvement des articulations du robot.
- Équipement médical: Dans certains dispositifs médicaux de précision pour contrôler le mouvement précis des composants.
Comment choisir un moteur pas à pas?
Quand Sélection d'un moteur pas à pas, considérez les facteurs suivants:
- Exigences de couple: Choisissez le couple approprié en fonction des exigences de charge et de vitesse de l'application.
- Angle de pas: Plus l'angle de pas est petit, plus la résolution du moteur est élevée, et plus le contrôle est fin.
- Vitesse: Choisissez une plage de vitesse adaptée en fonction des besoins de l'application.
- Taille et forme: Choisissez la taille de moteur appropriée en fonction de l'espace d'installation et des exigences de conception.
Conclusion
Moteurs pas à pas sont polyvalents et adaptés aux applications qui nécessitent un contrôle précis. A travers cette introduction, les débutants doivent avoir une compréhension de base des moteurs pas à pas et être capables de commencer à explorer leur potentiel dans diverses applications. Avec l’avancée continue de la technologie, la gamme d'applications des moteurs pas à pas est également en constante expansion, offrant un soutien solide à l'automatisation moderne et au contrôle de précision.
Greensky Power Co., Ltd. est un fabricant professionnel engagé dans la recherche, développement, production, vente de moteur pas à pas.
Si vous recherchez un moteur pas à pas pour votre projet, veuillez contacter notre équipe commerciale.
