
Moteur à engrenages vs moteur à courant continu: Quelle est la différence et lequel devriez-vous choisir?
Réponse rapide:
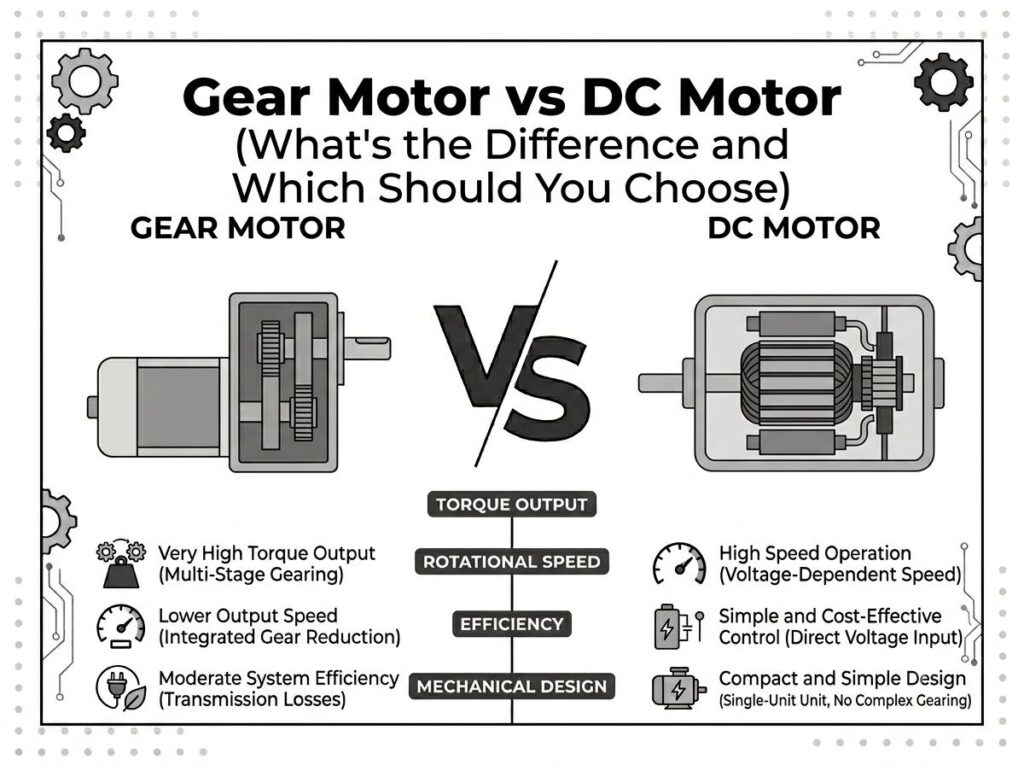
UN motoréducteur est un moteur à courant continu ou alternatif combiné à une boîte de vitesses, tandis qu'un docteur moteur se réfère uniquement au moteur électrique lui-même. Les moteurs à engrenages fournissent un couple nettement plus élevé et une vitesse de sortie inférieure grâce à l'utilisation d'une réduction mécanique, ce qui les rend idéaux pour les convoyeurs, robotique, équipement d'automatisation, et systèmes de contrôle de mouvement. En revanche, Les moteurs à courant continu offrent généralement une vitesse de rotation plus élevée et sont couramment utilisés dans les applications à entraînement direct telles que les pompes., Ventilateurs, et lames de coupe.
De nombreux moteurs à engrenages industriels utilisent aujourd'hui des moteurs à courant continu à aimant permanent ou des moteurs à courant continu sans balais associés à des moteurs planétaires., éperon, ver, ou des boîtes de vitesses hélicoïdales pour obtenir l'équilibre souhaité entre la vitesse, couple, efficacité, et précision de positionnement.
Qu'est-ce qu'un moteur à courant continu?
UN CC (Courant continu) moteur est un moteur électrique alimenté en courant continu. Il convertit l'énergie électrique en énergie mécanique de rotation grâce à l'interaction électromagnétique entre le stator et le rotor..
En raison de leur construction simple, une réponse rapide, taille compacte, et contrôle de vitesse relativement facile, Les moteurs à courant continu sont largement utilisés depuis des décennies dans l'automatisation industrielle, Équipement médical, appareils ménagers, véhicules électriques, robotique, outils électroportatifs, et équipements alimentés par batterie.
Contrairement aux motoréducteurs, un moteur à courant continu standard ne réduit pas intrinsèquement la vitesse ni n'augmente le couple. Plutôt, il délivre sa puissance directement à partir de l'arbre du moteur. Si une vitesse inférieure ou un couple plus élevé est requis, une boîte de vitesses peut être ajoutée à l'extérieur pour créer un motoréducteur à courant continu.
Construction de base d'un moteur à courant continu
Bien qu'il existe différentes technologies de moteurs à courant continu, la plupart partagent plusieurs éléments fondamentaux:
- Rotor (Armature) — le composant rotatif qui génère une sortie mécanique.
- Stator — produit le champ magnétique stationnaire entourant le rotor.
- Aimants permanents ou enroulements de champ — créer le flux magnétique nécessaire à la génération du couple.
- Roulements — soutenir l'arbre rotatif tout en minimisant la friction.
- Arbre de sortie — transfère la puissance de rotation à l'équipement entraîné.
L'interaction entre les champs magnétiques du rotor et du stator génère un couple électromagnétique, faisant tourner le rotor en continu.
Types de moteurs à courant continu
Les systèmes industriels modernes utilisent généralement deux catégories principales de moteurs à courant continu.
1. Moteur à courant continu brossé
Les moteurs à courant continu à balais utilisent des balais de charbon et un collecteur mécanique pour commuter le courant dans les enroulements du rotor pendant la rotation..
Leurs avantages incluent:
- Exigences simples du contrôleur
- Faible coût initial
- Installation facile
- Excellent couple de démarrage
- Largement disponible dans le monde entier
Cependant, les pinceaux s'usent progressivement avec le temps, nécessitant un entretien périodique. La commutation mécanique produit également du bruit électrique, des étincelles, et les frottements, durée de vie limitée dans des environnements industriels exigeants.
Applications typiques
- Outils électriques
- Accessoires automobiles
- Appareils de ménage
- Petits actionneurs
- Équipement portatif
2. Moteur CC sans balais (BLDC)
Les moteurs CC sans balais éliminent entièrement les balais mécaniques. Plutôt, les contrôleurs électroniques effectuent la commutation en fonction de la position du rotor détectée par les capteurs Hall ou le retour de l'encodeur.
Par rapport aux moteurs à balais, Les moteurs BLDC offrent de nombreux avantages techniques:
- Efficacité supérieure
- Durée de vie plus longue
- Entretien réduit
- Densité de puissance plus élevée
- Excellente régulation de la vitesse
- Bruit de fonctionnement réduit
- Meilleures performances thermiques
Parce qu'il n'y a pas de balais générant des frottements ou de l'usure, Les moteurs BLDC remplacent de plus en plus les moteurs à balais traditionnels dans l'automatisation industrielle et les équipements intelligents.
Applications BLDC courantes
- Robots industriels
- AGV
- Robots mobiles autonomes (RAM)
- Tondeuses à gazon électriques
- Équipement médical
- Systèmes d'asservissement
- Équipement logistique intelligent
Technologie à aimant permanent
La plupart des moteurs à courant continu modernes utilisent aimants permanents plutôt que des bobines de champ enroulées pour générer le champ magnétique du stator.
Les moteurs à courant continu à aimant permanent offrent plusieurs avantages techniques importants:
- Efficacité supérieure
- Réduction des pertes électriques
- Dimensions compactes
- Poids réduit
- Densité de couple améliorée
- Consommation d’énergie réduite
Aimants aux terres rares haute performance, en particulier Néodyme Fer Bore (NdFeB), ont considérablement amélioré les performances des moteurs à courant continu modernes au cours de la dernière décennie, permettant aux moteurs compacts de fournir un couple beaucoup plus élevé que les générations précédentes.
Comment un moteur à courant continu produit du couple
Le principe de fonctionnement d'un moteur à courant continu est basé sur la force électromagnétique.
Lorsque le courant électrique circule dans les enroulements du moteur, un champ magnétique est généré. L'interaction entre ce champ magnétique et le champ magnétique produit par le stator crée une force de rotation sur le rotor.
Comme les pôles magnétiques changent continuellement de position par commutation mécanique (moteurs brossés) ou commutation électronique (Moteurs BLDC), le rotor continue de tourner et fournit une puissance mécanique à l'arbre de sortie.
Les performances du moteur sont principalement influencées par:
- Tension d'alimentation
- Actuel
- Conception du bobinage du moteur
- Force de l'aimant
- Performances du contrôleur
- Capacité de refroidissement
Avantages des moteurs à courant continu
| Avantage | Avantage d'ingénierie |
|---|---|
| Grande vitesse | Convient aux applications à entraînement direct |
| Taille compacte | Intégration facile dans l'équipement |
| Contrôle de vitesse simple | Régulation de tension ou PWM |
| Réponse dynamique rapide | Accélération et décélération rapides |
| Large plage de vitesse | Généralement 500 à 10 000 tr/min |
| Haute efficacité (BLDC) | Consommation d’énergie réduite |
Limites des moteurs à courant continu standard
Malgré leurs nombreux avantages, les moteurs à courant continu standard ne sont pas idéaux pour toutes les applications.
Parce qu'ils tournent à une vitesse relativement élevée tout en produisant un couple de sortie limité, ils ne peuvent souvent pas conduire directement de lourdes charges mécaniques.
Les limitations typiques incluent:
- Couple de sortie inférieur sans réducteurs
- Capacité de maintien réduite
- Mauvaise stabilité à basse vitesse sous forte charge
- Boîte de vitesses supplémentaire requise pour de nombreux systèmes industriels
Pour cette raison, les ingénieurs combinent fréquemment des moteurs à courant continu avec des boîtes de vitesses pour obtenir un couple plus élevé, vitesse inférieure, et contrôle de mouvement amélioré. Le résultat est connu sous le nom de Moteur à engrenages à courant continu, qui sera expliqué dans la section suivante.
Qu'est-ce qu'un moteur à engrenages?
UN motoréducteur est une unité d'entraînement intégrée composée d'un moteur électrique et d'une boîte de vitesses mécanique. Contrairement à un moteur à courant continu standard qui fournit de la puissance directement à partir de son arbre de sortie, un moteur à engrenages réduit la vitesse de rotation grâce à un train d'engrenages tout en augmentant proportionnellement le couple de sortie.
Il est important de comprendre que un motoréducteur n'est pas une technologie de moteur distincte. Plutôt, c'est un assemblage qui combine deux composants majeurs:
- Moteur électrique – Génère de la puissance de rotation.
- Boîte de vitesses (Ralentisseur) – Convertit à grande vitesse, sortie à faible couple en basse vitesse, sortie de couple élevée.
Selon l'application, le moteur peut être un moteur à courant continu à balais, CC sans balais (BLDC) moteur, Moteur à induction CA, servomoteur, ou moteur pas à pas. La boîte de vitesses est sélectionnée en fonction du rapport de réduction requis, efficacité, niveau de bruit, et couple de sortie.
Structure de base d'un moteur à engrenages
Un motoréducteur industriel typique se compose des composants suivants:
| Composant | Fonction |
|---|---|
| Moteur électrique | Produit de la puissance de rotation |
| Arbre d'entrée | Transfère la puissance du moteur vers la boîte de vitesses |
| Train à engrenages | Réduit la vitesse et multiplie le couple |
| Roulements | Soutenir les arbres rotatifs et réduire la friction |
| Boîtier d'engrenage | Protège les engrenages internes et retient le lubrifiant |
| Arbre de sortie | Fournit du couple à l’équipement entraîné |
Parce que le moteur et la boîte de vitesses sont conçus comme un système adapté, les moteurs à engrenages offrent généralement une plus grande fiabilité, complexité d'installation réduite, et un meilleur alignement mécanique que les combinaisons moteur-réducteur assemblées séparément.
Comment une boîte de vitesses augmente-t-elle le couple?
Une boîte de vitesses fonctionne selon le principe de la réduction mécanique de la vitesse.
Lorsque le moteur entraîne un engrenage plus petit qui engrène avec un engrenage plus grand, la vitesse de rotation diminue tandis que le couple disponible augmente. Cela permet à des moteurs relativement petits de déplacer efficacement de lourdes charges..
Relation ingénierie:
Rapport de démultiplication ↑
↓
Vitesse de sortie ↓
↓
Couple de sortie ↑
Par exemple, un moteur à courant continu fonctionnant à 3,000 RPM avec un couple de sortie de 0.4 N·m peut être associé à un 30:1 boîte de vitesses. Ignorer les pertes de transmission mineures, la vitesse de sortie devient approximativement 100 RPM tandis que le couple de sortie augmente jusqu'à environ 12 N·m.
Ce principe simple explique pourquoi les motoréducteurs sont largement utilisés dans les applications nécessitant un couple de démarrage élevé., mouvement contrôlé, ou la capacité de déplacer des charges lourdes.
Types courants de moteurs à engrenages
Différentes conceptions de boîtes de vitesses offrent différents avantages. La sélection de la boîte de vitesses appropriée dépend des exigences de couple, espace d'installation, efficacité, niveau de bruit, et budget.
1. Moteur à engrenage droit
Les moteurs à engrenages droits utilisent des engrenages à coupe droite montés sur des arbres parallèles. Ils font partie des modèles de motoréducteurs les plus simples et les plus économiques..
Avantages:
- Construction simple
- Faible coût de fabrication
- Haute fiabilité mécanique
- Entretien facile
- Convient aux applications à couple modéré
Applications typiques:
- Machines d'emballage
- Portes automatiques
- Matériel de bureau
- Systèmes de manutention
2. Moteur à engrenages planétaires
Les moteurs à engrenages planétaires sont largement reconnus comme la solution privilégiée pour le contrôle de mouvement de précision.. Leur boîte de vitesses est constituée d'un planétaire central, Multiples Gears Planet, et une couronne dentée interne.
Parce que plusieurs engrenages planétaires partagent simultanément la charge transmise, les réducteurs planétaires atteignent une densité de couple exceptionnellement élevée tout en conservant des dimensions compactes.
Avantages:
- Capacité de couple élevée
- Taille compacte
- Excellente répartition de la charge
- Efficacité de transmission élevée
- Options à faible jeu
- Fonctionnement fluide
Applications typiques:
- Robots industriels
- AGV et AMR
- Systèmes d'asservissement
- Dispositifs médicaux
- Entraînements électriques
- Équipement d'automatisation intelligent
Les systèmes robotiques modernes utilisent fréquemment Moteurs à engrenages planétaires BLDC car ils combinent l'efficacité de la technologie sans balais avec le couple élevé de la réduction planétaire.
3. Moteur à engrenage à vis sans fin
Les moteurs à engrenages à vis sans fin utilisent un arbre à vis sans fin qui engrène avec une roue à vis sans fin positionnée à angle droit. Cette configuration permet des taux de réduction importants dans un boîtier compact.
L'une des caractéristiques les plus précieuses des moteurs à vis sans fin est leur capacité à fournir un autoverrouillage partiel ou complet., empêchant le mouvement inverse sous charge dans de nombreuses applications.
Avantages:
- Rapports de réduction très élevés
- Sortie compacte à angle droit
- Fonctionnement silencieux
- Bonne absorption des chocs
- Capacité d'auto-verrouillage dans de nombreux modèles
Applications typiques:
- Mécanismes de levage
- Opérateurs de portails
- Tourniquets
- Systèmes de positionnement de convoyeurs
- Actionneurs industriels
4. Moteur à engrenage hélicoïdal
Les moteurs à engrenages hélicoïdaux utilisent des dents d'engrenage inclinées qui s'engagent progressivement plutôt que simultanément. Cette conception réduit considérablement les vibrations et le bruit de fonctionnement tout en améliorant la capacité de charge.
Avantages:
- Très haute efficacité
- Fonctionnement fluide et silencieux
- Capacité de charge élevée
- Longue durée de vie
- Convient pour un fonctionnement continu
Applications typiques:
- Convoyeurs robustes
- Équipement minier
- Lignes de production industrielle
- Machines de transformation des aliments
- Grands systèmes d'automatisation
Avantages des moteurs à engrenages
| Avantage | Avantage d'ingénierie |
|---|---|
| Couple de sortie élevé | Déplace efficacement les charges lourdes |
| Faible vitesse de sortie | Améliore le contrôle des mouvements et le positionnement |
| Conception intégrée compacte | Simplifie l'installation |
| Capacité de charge améliorée | Convient aux machines industrielles |
| Rapports de réduction larges | Sélection de vitesse flexible |
| Haute fiabilité | Longue durée de vie en service continu |
Applications industrielles typiques des moteurs à engrenages
Les moteurs à engrenages sont sélectionnés chaque fois que les applications nécessitent un mouvement contrôlé plutôt qu'une vitesse de rotation maximale.
Les exemples courants incluent:
- Systèmes de convoyeurs
- Robots industriels
- Véhicules à guidage automatisé (AGV)
- Robots mobiles autonomes (RAM)
- Automatisation d'entrepôt
- Entraînements électriques
- Portails battants
- Tourniquets
- Portes automatiques
- Roues motrices de tondeuse à gazon
- Matériel de manutention
- Machines d'emballage
Bien que bon nombre de ces systèmes soient communément appelés simplement “moteurs à engrenages,” le moteur à l'intérieur est souvent un moteur à courant continu à aimant permanent à haut rendement ou un moteur BLDC. La boîte de vitesses est ce qui transforme ce moteur en un moteur à basse vitesse, solution d'entraînement à couple élevé.
Un moteur à courant continu peut-il être un moteur à engrenages?
Oui. En fait, de nombreux motoréducteurs industriels sont construits en combinant un moteur à courant continu avec une boîte de vitesses. Il s'agit de l'une des configurations de variateur les plus couramment utilisées dans les équipements d'automatisation modernes..
Docteur moteur
+
Boîte de vitesses
=
Moteur à engrenages CC
Cette combinaison simple permet aux ingénieurs de profiter de la vitesse de rotation élevée et de la taille compacte d'un moteur à courant continu tout en obtenant la vitesse faible., sortie de couple élevée requise par la plupart des machines industrielles.
Pourquoi ne pas utiliser un moteur à courant continu seul?
Un moteur à courant continu standard tourne souvent à des vitesses allant de 500 pour 10,000 RPM, en fonction de sa conception et de sa tension de fonctionnement. Bien que ce soit idéal pour les applications à entraînement direct telles que les ventilateurs ou les pompes, il est généralement trop rapide pour les équipements nécessitant un mouvement contrôlé ou une force de traction élevée.
Par exemple, une bande transporteuse fonctionne généralement à seulement quelques dizaines de tours par minute. Si entraîné directement par un moteur à courant continu à grande vitesse, le convoyeur fonctionnerait beaucoup trop vite et produirait un couple insuffisant pour déplacer des produits lourds.
L'ajout d'une boîte de vitesses résout ce problème en réduisant la vitesse et en multipliant le couple, permettant à un moteur relativement petit de gérer des charges beaucoup plus importantes.
Configurations courantes de moteurs à engrenages CC
| Type de moteur | Type de boîte de vitesses | Application typique |
|---|---|---|
| Moteur à courant continu brossé | Boîte de vitesses droite | Matériel de bureau, petite machinerie |
| Moteur à courant continu brossé | Boîte de vitesses à vis sans fin | Opérateurs de portails, actionneurs |
| Moteur BLDC | Réducteur planétaire | Robotique, AGV, RAM |
| Moteur BLDC | Boîte de vitesses hélicoïdale | Automatisation industrielle |
| Moteur à courant continu à aimant permanent | Réducteur planétaire | Équipement médical, roues motrices |
Aujourd'hui, la majorité des systèmes de mouvement industriels hautes performances ne considèrent plus le choix comme moteur à engrenages contre moteur à courant continu. Plutôt, ils intègrent les deux technologies pour créer une solution d'entraînement qui offre un équilibre optimal entre vitesse, couple, efficacité, précision, et durabilité.
Moteur à engrenages vs moteur à courant continu: Différences clés
Comprendre les différences fondamentales entre un motoréducteur et un moteur à courant continu est essentiel pour sélectionner le système d'entraînement approprié dans le design industriel.. Bien que les deux soient utilisés pour produire un mouvement de rotation, ils diffèrent considérablement par leur structure, caractéristiques de sortie, et l'adéquation de l'application.
Un moteur à courant continu est un dispositif électromagnétique autonome qui produit une sortie de rotation à grande vitesse. Un motoréducteur, d'autre part, est un système mécanique complet qui combine un moteur avec une boîte de vitesses pour réduire la vitesse et augmenter le couple.
En termes d'ingénierie pratique, la différence n'est pas seulement structurelle : elle affecte directement la densité de couple, plage de vitesse, comportement en efficacité sous charge, et complexité de l'intégration du système.
| Fonctionnalité | Docteur moteur | Moteur à engrenages |
|---|---|---|
| Définition | Moteur électrique uniquement | Moteur + ensemble de boîte de vitesses |
| Vitesse | Haut (sortie directe) | Faible (après réduction) |
| Couple | Abaisser à l'arbre | Plus élevé en raison du rapport de démultiplication |
| Efficacité | Haute efficacité électrique | Dépend du type de boîte de vitesses |
| Coût | Coût du système réduit | Coût du système plus élevé (boîte de vitesses supplémentaire) |
| Contrôle de précision | Moyen (cela dépend du contrôleur) | Haut (la réduction mécanique améliore la stabilité) |
| Applications typiques | Ventilateurs, pompes, souffler | Convoyeurs, robotique, Systèmes d'automatisation |
Comparaison de couple
Le couple est l'un des facteurs décisifs les plus critiques lors du choix entre un moteur à courant continu et un motoréducteur.. Alors que les moteurs à courant continu peuvent générer un couple suffisant pour les applications légères ou à grande vitesse, ils échouent souvent dans des conditions de charge lourde ou à basse vitesse.
Les moteurs à engrenages résolvent cette limitation en utilisant une réduction mécanique via une boîte de vitesses, multipliant efficacement le couple de sortie sans augmenter la taille du moteur.
Comment le rapport de démultiplication affecte le couple
La relation entre le rapport de démultiplication, vitesse, et le couple est fondamental en génie mécanique:
Rapport de démultiplication ↑
↓
Vitesse de sortie ↓
↓
Couple de sortie ↑
Cela signifie que lorsqu'un moteur est associé à une boîte de vitesses, le système échange la vitesse contre le couple. Par exemple, un 10:1 la boîte de vitesses réduit la vitesse d'un facteur dix tout en augmentant le couple à peu près du même facteur (moins les pertes d'efficacité).
Dans les applications du monde réel, cela permet à un petit moteur à courant continu d'effectuer des tâches qui nécessiteraient autrement un moteur beaucoup plus gros s'il était utilisé sans boîte de vitesses.
Exemple d'ingénierie
Considérez un moteur à courant continu avec les spécifications suivantes:
- Vitesse: 3000 RPM
- Couple: 0.5 N·m
Lorsqu'il est associé à un 20:1 réducteur planétaire:
- Vitesse de sortie: ~150 tr/min
- Couple de sortie: ~10 N·m (moins les pertes de la boîte de vitesses)
Cela démontre pourquoi les motoréducteurs sont préférés dans les applications nécessitant un couple de démarrage élevé telles que les convoyeurs., articulations robotiques, et systèmes de levage automatisés.
Comparaison de vitesse
La vitesse est un autre différenciateur majeur entre les moteurs à courant continu et les motoréducteurs.. Les moteurs à courant continu sont naturellement des appareils à grande vitesse, tandis que les moteurs à engrenages sont conçus pour fonctionner à des vitesses réduites optimisées pour les charges mécaniques.
Plages de vitesse typiques
- Docteur moteur: 500–10 000 tr/min
- Sortie du moteur à engrenages: 5–500 tr/min
La forte réduction de vitesse n'est pas un inconvénient mais une exigence fonctionnelle pour la plupart des systèmes industriels. De nombreuses charges mécaniques ne peuvent pas fonctionner efficacement à grande vitesse et nécessitent plutôt un mouvement contrôlé..
Par exemple:
- Les bras robotiques nécessitent des, mouvement à faible vitesse
- Les convoyeurs doivent maintenir une vitesse stable sous des charges variables
- Les tourniquets nécessitent une accélération et une décélération en douceur
Dans ces cas, un moteur à engrenages offre un contrôle nettement meilleur par rapport à un moteur à courant continu à entraînement direct.
Comparaison d'efficacité
Une idée fausse courante est que les motoréducteurs sont toujours inefficaces en raison des pertes d'énergie dans la boîte de vitesses.. En réalité, les technologies modernes de boîtes de vitesses, en particulier les conceptions planétaires et hélicoïdales, offrent une efficacité mécanique très élevée.
L'efficacité dépend fortement du type d'engrenage, qualité de lubrification, conditions de charge, et précision de fabrication.
Efficacité de la boîte de vitesses par type
| Type de boîte de vitesses | Plage d'efficacité typique | Notes d'ingénierie |
|---|---|---|
| Réducteur planétaire | 95% – 98% | Haute efficacité, design compact, largement utilisé en robotique et en AGV |
| Boîte de vitesses hélicoïdale | 96% – 98% | Transmission fluide, faible bruit, capacité de charge élevée |
| Boîte de vitesses droite | 90% – 95% | Conception simple, efficacité modérée, rentable |
| Boîte de vitesses à vis sans fin | 50% – 90% | Rapport de réduction élevé mais pertes par frottement par glissement importantes |
Alors que les moteurs à courant continu sont très efficaces dans la conversion de l'énergie électrique (en particulier les types BLDC), les motoréducteurs introduisent des pertes mécaniques. Cependant, dans des applications correctement sélectionnées, le couple amélioré et la réduction des contraintes du système compensent souvent la pénalité en termes d'efficacité.
En robotique et automatisation, les systèmes à engrenages planétaires sont largement utilisés car ils offrent un équilibre optimal entre efficacité, densité de couple, et taille compacte.
Comparaison des coûts
Le coût est un facteur majeur dans les décisions d’achats industriels. Cependant, il est important de faire la distinction entre le coût des composants et le coût au niveau du système.
Un moteur à courant continu seul est généralement moins cher qu'un système complet de motoréducteur.. Cependant, quand une boîte de vitesses, structure de montage, et un couplage mécanique sont nécessaires, le coût total du système peut augmenter considérablement.
| Elément de coût | Système de moteur à courant continu | Système de moteur à engrenages |
|---|---|---|
| Coût du moteur | Inférieur | Moyen |
| Coût de la boîte de vitesses | Non requis | Requis |
| Coût du contrôleur | Requis (surtout BLDC) | Requis (selon le type de moteur) |
| Intégration mécanique | Effort d'ingénierie plus élevé | Système pré-intégré |
| Coût total du système | Inférieur pour les applications simples | Plus élevé mais plus optimisé pour les systèmes à couple critique |
Dans de nombreux projets OEM, les moteurs à engrenages réduisent les coûts d'ingénierie globaux même si le coût des composants est plus élevé, parce qu'ils simplifient la conception mécanique, réduire le temps de montage, et améliorer la fiabilité du système.
Quel est le meilleur pour la robotique?
La robotique est l'un des domaines d'application les plus importants lorsque l'on compare les motoréducteurs et les moteurs à courant continu.. Les principales exigences en robotique incluent un positionnement précis, couple élevé à basse vitesse, construction compacte, et un contrôle de mouvement fluide.
Un moteur à courant continu standard suffit rarement à lui seul pour les articulations robotiques ou les mouvements porteurs, car il fonctionne à grande vitesse avec un couple relativement faible au niveau de l'arbre.. Sans système de réduction, il ne peut pas maintenir un mouvement stable sous des charges variables.
Pour cette raison, la plupart des systèmes robotiques modernes utilisent une combinaison d'un moteur DC ou BLDC avec un réducteur planétaire, formant un Moteur à engrenages planétaires à courant continu ou Motoréducteur BLDC.
Meilleure solution: Moteur à engrenages planétaires DC/BLDC
Quel est le meilleur pour les systèmes de convoyeurs?
Les systèmes de convoyeurs nécessitent un fonctionnement continu, vitesse stable, et un couple suffisant pour déplacer les matériaux dans des conditions de charge variables.
Un moteur à engrenages est généralement le meilleur choix car il fournit une sortie constante à basse vitesse et un couple élevé sans nécessiter une conception mécanique externe complexe..
Les moteurs à courant continu sans réducteur ne sont pas idéaux car ils tournent trop vite et ne peuvent pas gérer efficacement de lourdes charges à basse vitesse..
Meilleure solution: Motoréducteur (en particulier les types d'engrenages hélicoïdaux ou à vis sans fin en fonction des conditions de charge)
Quel est le meilleur pour les pompes?
Les pompes nécessitent généralement une rotation à grande vitesse plutôt qu'un couple élevé. La dynamique des fluides des systèmes de pompage dépend fortement de la vitesse de la roue, ce qui fait des moteurs à courant continu à entraînement direct un choix plus approprié.
Dans la plupart des applications de pompes, l'ajout d'une boîte de vitesses réduirait inutilement l'efficacité et augmenterait la complexité du système.
Les moteurs BLDC sont particulièrement populaires dans les systèmes de pompes modernes en raison de leur rendement élevé, taille compacte, et capacité à maintenir une vitesse stable dans des conditions de charge variables.
Meilleure solution: Moteur à courant continu ou moteur BLDC (entraînement direct)
Quel est le meilleur pour les tondeuses à gazon?
Les systèmes de tondeuse à gazon nécessitent généralement deux exigences de mouvement différentes: rotation de la lame et entraînement des roues. Ces deux sous-systèmes ont des besoins mécaniques très différents.
Système de lame
La lame de coupe nécessite une rotation à grande vitesse pour des performances de coupe efficaces. Dans ce cas, un moteur DC ou BLDC à entraînement direct est préférable.
L'ajout d'une boîte de vitesses réduirait la vitesse de la lame et aurait un impact négatif sur l'efficacité de coupe..
Meilleure solution: Moteur BLDC à entraînement direct
Système de roue motrice
Le système d'entraînement des roues nécessite un couple élevé à basse vitesse, surtout lors de l'escalade de pentes ou de déplacements sur des terrains accidentés.
Un motoréducteur est idéal ici car il fournit la multiplication de couple nécessaire et un contrôle stable à basse vitesse.
Meilleure solution: Moteur à engrenages CC ou moteur à engrenages planétaires BLDC
Quel est le meilleur pour les tourniquets?
Les systèmes de tourniquet nécessitent une rotation contrôlée, accélération douce, et une sortie de couple fiable pour garantir la sécurité et un fonctionnement cohérent dans les systèmes d'accès public.
Un moteur à engrenages planétaires est la solution la plus largement utilisée dans les conceptions de tourniquets modernes car il offre:
- Densité de couple élevée
- Taille d'installation compacte
- Contrôle de position précis
- Haute durabilité pour un fonctionnement continu
Les moteurs à engrenages à vis sans fin sont également utilisés dans certaines conceptions en raison de leur capacité d'autoverrouillage., mais les systèmes planétaires offrent une meilleure efficacité et un contrôle de mouvement plus fluide.
Meilleure solution: Motoréducteur planétaire (Système basé sur DC ou BLDC)
Comment choisir entre les moteurs à engrenages et les moteurs à courant continu
Le choix entre un motoréducteur et un moteur à courant continu dépend entièrement des exigences de l'application telles que la demande de couple., plage de vitesse, cycle de service, contraintes d'espace, et contrôler la précision.
La matrice d'application suivante fournit une ligne directrice d'ingénierie simplifiée:
| Application | Solution recommandée |
|---|---|
| Ventilateur | Docteur moteur |
| Pompe | Docteur moteur / Moteur BLDC |
| Convoyeur | Moteur à engrenages (Hélicoïdal / Éperon) |
| VAG | Moteur de vitesse planétaire BLDC |
| Joint de robot | Moteur de vitesse planétaire BLDC |
| Lame de tondeuse à gazon | Moteur à entraînement direct BLDC |
| Roue motrice de tondeuse à gazon | Moteur à engrenages CC / Moteur à engrenages BLDC |
| Tourniquet | Moteur à engrenages planétaires |
Dans le design industriel moderne, la décision est rarement “moteur à engrenages vs moteur à courant continu” seul. Plutôt, les ingénieurs combinent de plus en plus les deux concepts en utilisant un moteur DC ou BLDC intégré à une boîte de vitesses de précision pour obtenir des performances système optimales.
Pourquoi les acheteurs OEM choisissent Greensky Power
Pour les fabricants OEM et les entreprises d’automatisation industrielle, La sélection d'un fournisseur de moteurs fiable n'est pas seulement une question de spécifications de produit, mais aussi sur la capacité d'intégration du système, flexibilité de personnalisation, et stabilité de la production.
Greensky Power fournit des solutions de mouvement intégrées conçues pour les applications industrielles nécessitant une optimisation du couple, construction compacte, et longue durée de vie.
- Moteurs à engrenages planétaires
- Moteurs à engrenages droits
- Moteurs de vitesses à ver
- Moteurs à engrenages BLDC
- Ingénierie de boîtes de vitesses personnalisées
- Moteur + Solutions intégrées pour boîtes de vitesses
- Prise en charge de la conception OEM/ODM
- Faible MOQ pour les échantillons d'ingénierie
- Prototypage et validation rapides
Ces capacités permettent aux clients OEM de réduire le temps de développement, améliorer la fiabilité mécanique, et accélérer les cycles de lancement de produits sur des marchés industriels compétitifs.
FAQ
Un motoréducteur est-il la même chose qu'un moteur à courant continu?
Non. Un moteur à courant continu est un moteur électrique autonome, tandis qu'un motoréducteur est un moteur combiné à une boîte de vitesses pour réduire la vitesse et augmenter le couple.
Un moteur à courant continu peut-il avoir une boîte de vitesses?
Oui. Lorsqu'une boîte de vitesses est ajoutée à un moteur à courant continu, le résultat s'appelle un motoréducteur à courant continu, couramment utilisé dans l'automatisation industrielle et la robotique.
Un motoréducteur est-il plus puissant qu'un moteur à courant continu?
Un moteur à engrenages fournit un couple de sortie plus élevé grâce à la réduction des engrenages, mais cela ne génère pas intrinsèquement plus de puissance. Il échange la vitesse contre le couple.
Pourquoi utiliser un motoréducteur planétaire?
Les moteurs à engrenages planétaires offrent une densité de couple élevée, taille compacte, haute efficacité, et une excellente répartition de la charge, ce qui les rend idéaux pour la robotique et les AGV.
Quel moteur est le meilleur pour la robotique?
La plupart des systèmes robotiques utilisent des moteurs BLDC combinés à des réducteurs planétaires pour obtenir un contrôle de mouvement précis et un couple de sortie élevé..
Quel moteur est le meilleur pour les convoyeurs?
Motoréducteurs, en particulier les types hélicoïdaux ou éperons, sont couramment utilisés car ils offrent un fonctionnement stable à faible vitesse et à couple élevé.
Références
1. Transactions IEEE sur l’électronique industrielle – Systèmes d’entraînement de moteurs électriques
2. Fondamentaux des machines électriques – Stephen J. Chapman
3. Conception en génie mécanique – Principes de conception en génie mécanique de Shigley
4. Manuel des systèmes d'engrenages industriels – Gear Technology Journal
5. Applications de moteurs à courant continu sans balais dans les systèmes d'automatisation - Revue de l'électronique de puissance

