
Quel moteur pour robot de rééducation(robot à moteur à courant continu)?
Robot de réhabilitation(robot à moteur à courant continu) utiliser Robotique de réhabilitation il appartient à une branche de robot médical, En raison de la popularité de la 5G, il est largement utilisé dans le domaine médical, réhabilitation et autres domaines; robot de réhabilitation(robot à moteur à courant continu) dans les articulations, conduire, plateau, marche et autres composants largement utilisés micro Brosser le moteur DC, moteur à courant continu sans balais, moteur pas à pas, moteur à coupelles creuses, Servo et autres micro-moteurs, comme moteur d'entraînement. Généralement, Ils sont également utilisés avec une boîte de vitesses de réduction. Le suivant détaille les types de micro-moteurs et paramètres qui seront utilisés dans les robots de réhabilitation.
D'abord. Motoréducteurs à courant continu
catégorie de produit: Motoréducteur à courant continu
Modèle de produit:ZWMD008008-152-01
Spécification de produit: Produit φ8 mm
Tension:4.2V
Vitesse à vide:15000-30000tr/min
Courant à vide: <105 mA (Peut être personnalisé)
Rapport de réduction de vitesse: 152:1 (personnalisable)
Charge nominale:personnalisé à la demande

Deuxième, moteur à bascule
Classement des produits: Moteur à bascule
Diamètre extérieur: 6millimètre
Matériel: Matériel
Sens de rotation: cw&sens antihoraire
Différence de retour de boîte de vitesses: ≤3°
Palier: roulement à huile; Roulements à billes
Faux-rond axial: ≤0.3mm (roulement à huile); ≤0.2mm (Roulements à billes)
Charge radiale de l'arbre de sortie: ≤ 0,5N (roulement à huile); ≤ 5N (Roulements à billes)
Température de fonctionnement: -20……+85℃

Trois, moteur à coupelles creuses
Classement des produits: motoréducteur à coupelle creuse
Diamètre extérieur: 24millimètre
Matériel: Plastique
Sens de rotation: cw&sens antihoraire
Différence de retour de boîte de vitesses: ≤3° (Peut être personnalisé)
Palier:Portefeuille d'huile;Roulements à billes
Faux-rond axial: ≤0.1mm(roulement à huile);≤0.1mm(Roulements à billes)
Charge radiale de l'arbre de sortie:≤50N(roulement à huile);≤100N(Roulements à billes)
Vitesse d'entrée:≤15000tr/min
Température de fonctionnement:-20……+85℃

Quatre, Moteur à balais CC
Classement des produits: Moteur à engrenage brossé DC
Diamètre extérieur: 10millimètre
Matériel: matériel
Sens de rotation: cw&sens antihoraire
Différence de retour de boîte de vitesses: ≤3°
Palier:roulement à huile;Roulements à billes
Faux-rond axial: ≤0.3mm(roulement à huile);≤0.2mm(Roulements à billes)
Charge radiale de l'arbre de sortie: ≤2N (roulement à huile); ≤7N (Roulements à billes)
Température de fonctionnement: -20 ……+85℃

V. Moteur CC sans balais
catégorie de produit: Moteur d'engrenage sans balais
Spécifications du produit:Produits Φ20MM
Tension:12V
Courant à vide:220 mA (personnalisable)
Vitesse de chargement:2.4-1000 rpm (personnalisable)
Rapport de réduction de vitesse: 5/25/125/625:1 (personnalisable)

Six, servo personnalisé non standard
Nom du produit: Servo de robot
Description du projet afin de répondre aux besoins de divers types de joints de robot développés par la haute technologie moderne, nous produisons des boîtes de vitesses pour robots avec des spécifications allant de 3,4 mm à 45 mm; afin de résoudre la précision de conception et de fabrication du servo-engrenage et le contrôle de la différence de retour du servo, nous avons optimisé la précision de conception et de fabrication du servo-engrenage en fonction de nos nombreuses années d'expérience R&Expérience en D et en conception combinée à la demande du marché des joints de robot pour réduire la différence de retour.
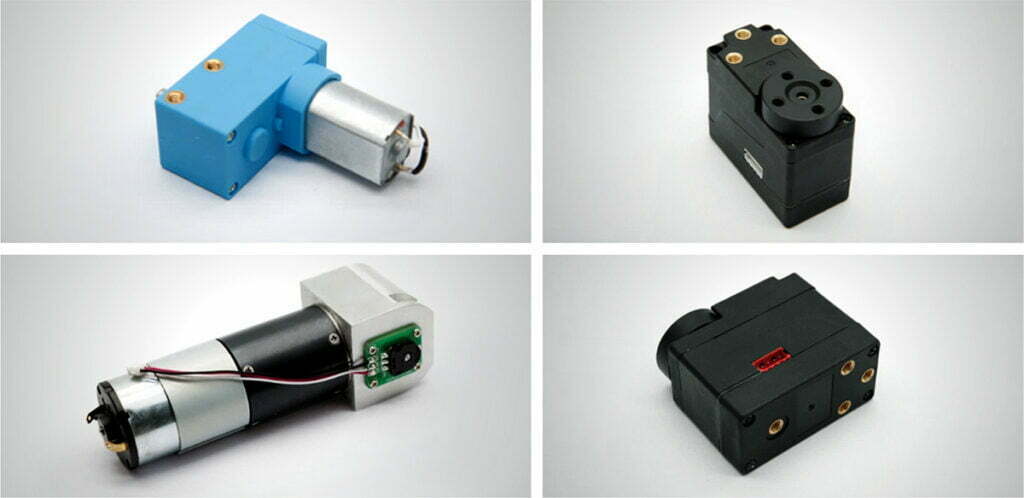
Différentes pièces du robot de rééducation, utilisant différents moteurs de micro-entraînement, servomoteur, moteurs d'entraînement personnalisés non standard, généralement appliqué dans le servo commun, rotation de l'entraînement, interaction des membres et autres modules d'entraînement.

