Quel moteur pour robot de rééducation(robot à moteur à courant continu)?
Rehabilitation robot(robot à moteur à courant continu) utiliser Rehabilitation robotics it belongs to a branch of medical robot, due to the popularity of 5G is widely used in medical, rehabilitation and other fields; rehabilitation robot(robot à moteur à courant continu) in the joints, conduire, tray, walking and other components widely used micro brush DC motor, moteur à courant continu sans balais, moteur pas à pas, moteur à coupelles creuses, servo and other micro motors, comme moteur d'entraînement. Généralement, they are also used together with a reduction gearbox. The following details the types of micro motors and parameters that will be used in rehabilitation robots.
D'abord. Motoréducteurs à courant continu
catégorie de produit: Motoréducteur à courant continu
Product Model:ZWMD008008-152-01
Spécification de produit: Φ8MM product
Tension:4.2V
Vitesse à vide:15000-30000tr/min
Courant à vide: <105 mA (Peut être personnalisé)
Rapport de réduction de vitesse: 152:1 (personnalisable)
Rated load:customized on demand

Deuxième, stepper geared motor
Classement des produits: Stepper geared motor
Outside diameter: 6millimètre
Matériel: Hardware
Sens de rotation: cw&sens antihoraire
Différence de retour de boîte de vitesses: ≤3°
Palier: roulement à huile; Roulements à billes
Faux-rond axial: ≤0.3mm (roulement à huile); ≤0.2mm (Roulements à billes)
Charge radiale de l'arbre de sortie: ≤ 0,5N (roulement à huile); ≤ 5N (Roulements à billes)
Température de fonctionnement: -20……+85℃

Trois, moteur à coupelles creuses
Classement des produits: motoréducteur à coupelle creuse
Diamètre extérieur: 24millimètre
Matériel: Plastique
Sens de rotation: cw&sens antihoraire
Différence de retour de boîte de vitesses: ≤3° (Peut être personnalisé)
Palier:Oil bearing;Roulements à billes
Faux-rond axial: ≤0.1mm(roulement à huile);≤0.1mm(Roulements à billes)
Charge radiale de l'arbre de sortie:≤50N(roulement à huile);≤100N(Roulements à billes)
Vitesse d'entrée:≤15000tr/min
Température de fonctionnement:-20……+85℃

Quatre, Moteur à balais CC
Classement des produits: DC brushed geared motor
Diamètre extérieur: 10millimètre
Matériel: matériel
Sens de rotation: cw&sens antihoraire
Différence de retour de boîte de vitesses: ≤3°
Palier:roulement à huile;Roulements à billes
Faux-rond axial: ≤0.3mm(roulement à huile);≤0.2mm(Roulements à billes)
Charge radiale de l'arbre de sortie: ≤2N (roulement à huile); ≤7N (Roulements à billes)
Température de fonctionnement: -20 ……+85℃

V. Moteur CC sans balais
catégorie de produit: Brushless gear motor
Product Specifications:Produits Φ20MM
Tension:12V
Courant à vide:220 mA (personnalisable)
Vitesse de chargement:2.4-1000 rpm (personnalisable)
Rapport de réduction de vitesse: 5/25/125/625:1 (personnalisable)

Six, servo personnalisé non standard
Nom du produit: Robot servo
Project description In order to meet the needs of various types of robot joints developed by modern high technology, we produce robot joint gearboxes with specifications ranging from 3.4MM to 45MM; in order to solve the design and manufacturing precision of the servo gear and the control of the return difference of the servo, we have optimized the design and manufacturing precision of the servo gear according to our many years of R&D and design experience combined with the market demand of robot joints to reduce the return Difference.
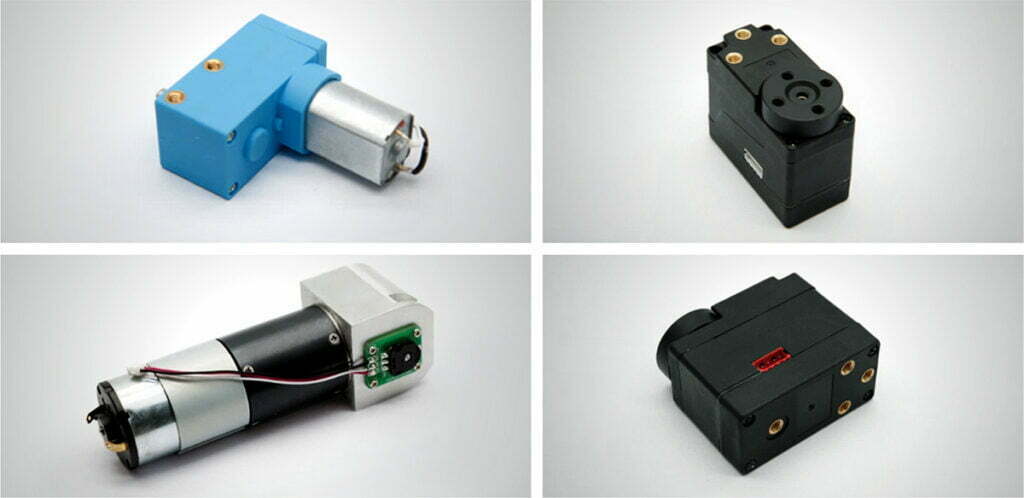
Different parts in the rehabilitation robot, using different micro drive motors, servo, non-standard custom drive motors, usually applied in the joint servo, drive rotation, limb interaction and other drive modules.
