
Brushless DC Motor-BLDC Basics — TMC4671-LA
Quand il s'agit de moteurs à courant continu sans balais, il faut mentionner le moteur de la brosse. Les moteurs à balais ont un inconvénient plutôt gênant: c'est “bruyant”.
Parce que les brosses et la bague de commutation doivent constamment frotter, pour alimenter l'induit.
Donc, si vous voulez un “ventilateur silencieux”, vous ne pouvez certainement pas choisir l'utilisation de produits pour moteurs à balais.
Et les brosses sont plus susceptibles d'être endommagées après une longue période. Lorsque le courant est élevé, vous pouvez même voir les brosses crépiter et faire des étincelles lorsque vous changez de direction.
Aucun de ces inconvénients ne se retrouve dans Moteur CC sans balais-BLDC que nous présenterons ci-dessous!
Nous présenterons le brushless Moteur à courant continu-BLDC (BLDC en abrégé) des quatre aspects suivants.
1, Les avantages et inconvénients du BLDC.
2, Le principe de fonctionnement de BLDC.
3, Le mode de contrôle de BLDC.
4, L'utilisation réelle de BLDC.
1、Avantages et inconvénients du BLDC
Moteur CC sans balais, littéralement, sa plus grande caractéristique est “sans brosse”, ce qui signifie pas de pinceaux.
Parce qu'il n'y a pas de brosse, c'est très parfait pour éviter les plusieurs défauts du moteur de la brosse. Alors à son tour, ses principaux avantages sont.
1, longue vie; 2, peut être silencieux; 3, haute efficacité (faible perte); 4, taille plus petite; 5, haute stabilité.
- 1. Les moteurs CC sans balais fonctionnent dans une large gamme de vitesses, à n'importe quelle vitesse, peut fonctionner à pleine puissance.
- 2. Capacité de surcharge exceptionnelle et efficacité de fonctionnement élevée.
- 3. Le moteur CC sans balais est plus petit, gamme d'applications plus large et densité de puissance plus élevée par rapport au moteur à balais.
- 4. Par rapport à la commande d'entraînement du moteur asynchrone, la conduite est plus simple.
- 5. Le moteur CC sans balais n'a pas de structure de commutateur mécanique et est enfermé à l'intérieur, qui peut éviter que des particules de poussière volantes ne pénètrent à l'intérieur du moteur et entraînent divers problèmes et une grande fiabilité.
- 6. Les caractéristiques externes sont meilleures, fonctionnement à basse vitesse, peut produire un couple important, peut fournir un couple de démarrage relativement important.
Inconvénients du BLDC
Revenons à la question laissée devant: quels sont les inconvénients du BLDC?
Je crois que tu as déjà deviné: nous avons passé tellement d'espace pour parler de la méthode de contrôle de BLDC, de quoi voir la difficulté de sa maîtrise, par rapport au moteur à balais, est beaucoup plus élevé!
Ainsi, le plus grand inconvénient de BLDC est sa difficulté de contrôle élevée et le prix élevé de la conduite ESC (Contrôle électronique de la vitesse, ESC pour faire court).
Il a également un inconvénient que le BLDC en raison de la résistance inductive, le démarrage sera accompagné de gigue, contrairement au démarrage du moteur à balais si doux.
Maintenant, il existe trois méthodes de contrôle de moteur sans balais grand public comme suit.
1、Contrôle d'onde carrée.
Également connu sous le nom de contrôle des ondes trapézoïdales, 120° contrôle, 6-commande de commutation de pas
La méthode de contrôle d'onde carrée a l'avantage d'algorithmes de contrôle simples, faibles coûts de matériel, l'utilisation de l'exécution ordinaire du manette pourra obtenir une vitesse de moteur élevée.
L'inconvénient est que la fluctuation de couple est importante, il y a un certain bruit de courant, et le rendement n'atteint pas le maximum. Le contrôle d'onde carrée convient aux applications qui ne nécessitent pas de performances de rotation élevées du moteur.
Le contrôle par onde carrée utilise un capteur Hall ou un algorithme d'estimation sans capteur pour obtenir la position du rotor du moteur, puis effectue six commutations (un tous les 60°) en fonction de la position du rotor dans un cycle électrique de 360°.
A chaque position de commutation, le moteur produit une force dans une direction spécifique, on peut donc dire que la précision de position du contrôle par onde carrée est électrique de 60 °.
Étant donné que la forme d'onde du courant de phase du moteur est proche de l'onde carrée de cette manière de contrôle, c'est ce qu'on appelle le contrôle par onde carrée.

2、Contrôle d'onde sinusoïdale.
La méthode de contrôle par onde sinusoïdale utilise l'onde SVPWM, et la sortie est une tension sinusoïdale triphasée, et le courant correspondant est également un courant sinusoïdal.
Cette méthode n'a pas le concept de commutation de contrôle d'onde carrée, ou penser qu'un cycle électrique en un nombre infini de commutation.
Évidemment, par rapport au contrôle par onde carrée, le contrôle par onde sinusoïdale a moins de fluctuation de couple et moins d'harmoniques de courant, ce qui rend le contrôle plus “délicat”, mais les exigences de performance du manette sont légèrement supérieurs au contrôle à onde carrée, et l'efficacité du moteur ne peut pas être maximisée.
3、contrôle focal

Aussi connu sous le nom de conversion de fréquence vectorielle, contrôle directionnel du vecteur de champ magnétique
Le contrôle d'onde sinusoïdale réalise le contrôle du vecteur de tension, réalise indirectement le contrôle de la taille actuelle, mais ne peut pas contrôler la direction du courant.
La méthode de contrôle FOC peut être considérée comme une version améliorée du contrôle par onde sinusoïdale, qui réalise le contrôle du vecteur courant, c'est à dire., le contrôle vectoriel du champ statorique du moteur.
Étant donné que la direction du champ statorique est contrôlée, le champ statorique et le champ rotorique peuvent être maintenus à 90° à tout moment, et la sortie de couple maximale à un certain courant peut être atteinte.
Les avantages de la méthode de contrôle FOC sont: faible fluctuation de couple, haute efficacité, faible bruit et réponse dynamique rapide.
Les inconvénients sont: coût du matériel plus élevé, exigences plus élevées pour les performances du contrôleur, et les paramètres du moteur doivent être adaptés.
FOC est actuellement le meilleur choix pour un contrôle efficace des moteurs CC sans balais (BLDC) et moteurs synchrones à aimants permanents (PMSM).
FOC contrôle avec précision l'amplitude et la direction du champ magnétique, ce qui rend le couple moteur lisse, faible bruit, haute efficacité, et a une réponse dynamique à grande vitesse.
En raison des avantages évidents du FOC, de nombreuses entreprises remplacent progressivement le contrôle des produits traditionnels par FOC pour de nombreuses applications.
L'Allemagne Trinamic a une puce de servocommande avec contrôle vectoriel du champ magnétique (FOC) — TMC4671-LA
– Mode de contrôle du couple
– Mode de contrôle de la vitesse
– Mode de contrôle de position
– Fréquence de rafraîchissement du contrôle actuel et fréquence PWM maximale de 100 KHz (la fréquence de rafraîchissement pour le contrôle de la vitesse et de la position peut être configurée comme un multiple de la fréquence de rafraîchissement actuelle actuelle)

Le TMC4671 est une puce de servocommande entièrement intégrée qui fournit un contrôle directionnel du champ magnétique pour les moteurs à courant continu sans balais, moteurs synchrones à aimants permanents, 2-moteurs pas à pas à phases, moteurs à courant continu à balais et moteurs à bobine mobile.
Toutes les fonctions de contrôle sont intégrées dans le matériel. Avec ADC intégrés, interface capteur de position, et différentiel de position, ce contrôleur d'asservissement complet convient à une variété d'applications d'asservissement.
2、Le principe de fonctionnement de BLDC
BLDC est une sorte de moteur, donc sa composition la plus élémentaire est indissociable du stator et du rotor.
Le stator d'un moteur à balais est un aimant permanent, tandis que son rotor est une bobine excitée (enroulement). Comme le montre la figure ci-dessous.

Mais pour le BLDC, le contraire est vrai!
Le stator (stator) d'un BLDC est une bobine sous tension, tandis que le rotor est un aimant permanent!

Depuis “Loi de Maxwell-Ampère”, nous pouvons savoir que l'espace près de la bobine sous tension va générer un champ magnétique. Et la direction de la distribution du champ magnétique, nous pouvons utiliser le “règle de la main droite” dériver.
En fait, c'est ce qu'on appelle souvent “électro-aimant”!
Ensuite, la prochaine chose est simple, quelles sont les propriétés des aimants?
Le même sexe se repousse, le sexe opposé s'attire!
Donc, il suffit de remettre la bobine sur le stator pour accéder au bon sens du courant, c'est, de sorte que les pôles magnétiques de la direction de l'électroaimant.
Donc, nous avons juste besoin de connecter la bobine sur le stator à la direction appropriée du courant, c'est, que la direction des pôles magnétiques de l'électroaimant et la direction des pôles magnétiques de l'aimant permanent correspondent exactement, ne pas pouvoir repousser, ou attirer le rotor pour faire un mouvement de rotation.
Optimisation du stator
La méthode de conduite ci-dessus, c'est à dire. alimentant chaque bobine individuellement en séquence, est faisable mais trop lourd et inefficace.
Donc, le BLDC réel combinera ces six bobines deux par deux et les divisera en trois enroulements, UN, B, et C, comme suit.

De cette façon, nous pouvons piloter deux électroaimants en même temps, ce qui double immédiatement l'efficacité.
Mais ce n'est qu'avec l'aimant “attraction” caractéristiques, n'oubliez pas que l'aimant aussi “répulsion” caractéristiques.
Si nous conduisons un autre ensemble de bobines en même temps, de sorte que le jeu de bobines précédent “attirer” le rotor lorsque l'autre ensemble de bobines “repousser” le rotor, alors notre rotor obtiendra une force motrice plus élevée!
Jusqu'à présent, ce modèle a commencé à se rapprocher du produit BLDC réel.
Mais pour le modèle ci-dessus
Cependant, pour le modèle ci-dessus, nous devons fournir deux enroulements avec deux ensembles de puissance dans des directions opposées pour obtenir l'effet de “attraction” et “répulsion” en même temps.
C'est trop compliqué et coûteux pour des applications pratiques.
Ensuite, nous parlerons de la “Méthode de contrôle BLDC”, ce qui résoudra le problème ci-dessus.
3、Méthode de contrôle de BLDC
L'A d'origine, B, C trois enroulements sont indépendants, il est donc très difficile de les contrôler.
Alors si on connecte les trois enroulements de A,B,C ensemble et assembler un “arrangement en étoile”, quel sera le résultat?

À l'origine trois enroulements, menant à six lignes; mènent maintenant à la ligne réduite à seulement trois lignes, alors comment obtenir le même effet de contrôle avec six lignes ainsi connectées?
La figure suivante.
Le côté positif de l'alimentation est connecté au coin supérieur droit de l'entrée de l'enroulement A, tandis que le côté négatif de l'alimentation est connecté au coin inférieur gauche de la sortie de l'enroulement B.
Cette fois, les enroulements A et B sont entraînés en même temps, et sa polarité est exactement opposée, pour obtenir le même effet lorsque les trois enroulements sont entraînés indépendamment!
Donc en suivant cette séquence: AB-AC-BC-BA-CA-CB, les six temps, et cyclant les enroulements du stator tour à tour, le rotor peut continuer à tourner!
Six commutateurs électroniques peuvent être utilisés pour piloter ces six battements, comme suit.
Détection de position
Bien que nous sachions déjà contrôler les six battements du rotor.
Mais avez-vous trouvé un nouveau problème: si vous ne connaissez pas la position du rotor, comment savez-vous quand conduire quel enroulement?
Nous devons donc connaître la position actuelle du rotor!
Et la position du rotor est détectée de deux manières générales.
1, Méthode de détection du capteur à effet Hall.
La figure suivante, mettre dans le stator H1,H2,H3, trois capteurs Hall, vous pouvez connaître la position exacte actuelle du stator.
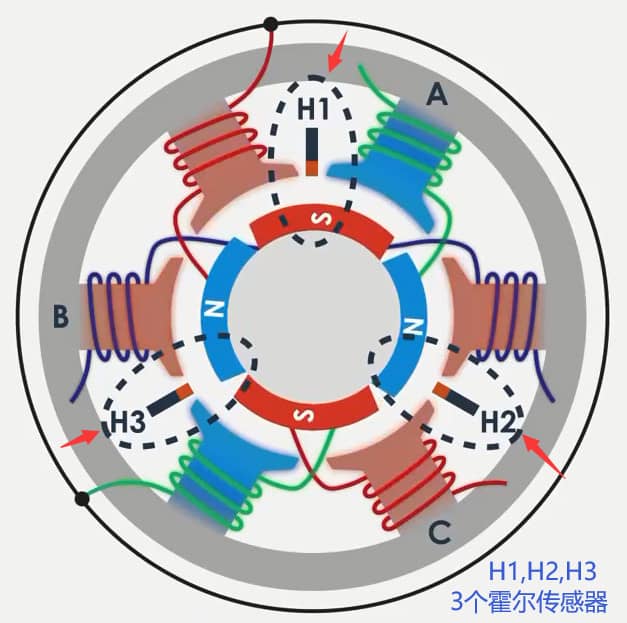
Sortie du capteur Hall avec niveaux haut et bas pour indiquer.

2, procédé de détection de force électromotrice inverse
La méthode de détection Back EMF est basée sur le principe de l'induction électromagnétique.
Lorsque le champ magnétique (Flux magnétique) autour d'un enroulement non alimenté change, un potentiel électrique est induit dans cet enroulement.
En détectant l'amplitude et la direction de ce potentiel électrique, nous pouvons également connaître la position actuelle du stator.

Ces deux méthodes de détection ont leurs avantages et leurs inconvénients.
La détection du capteur Hall est un peu plus précise, mais aussi plus cher.
Au contraire, la méthode de détection de force électromotrice inverse est plus économique, mais un peu moins précis.
Rotor intérieur ou rotor extérieur
BLDC a deux types de structure: le rotor à l'intérieur est appelé rotor interne BLDC; au contraire, le rotor extérieur est appelé rotor extérieur BLDC.

Relativement parlant, le rotor externe BLDC est utilisé plus souvent.
La raison principale est que le rotor externe BLDC est plus stable dans la structure mécanique. C'est parce que le rotor du moteur a tendance à se dilater vers l'extérieur en raison de la force centrifuge lors d'un fonctionnement à grande vitesse..
Ainsi, le rotor interne BLDC a besoin d'une très grande précision mécanique pour s'assurer que le rotor et le stator ne se battront pas.
Mais si la distance réservée est trop loin, cela conduira à une fuite magnétique et affectera l'efficacité globale du moteur.
Mais ce n'est pas un problème avec le rotor extérieur BLDC, parce que le rotor extérieur n'est naturellement pas affecté par la dilatation.
4、L'application pratique de BLDC
Alors regardons la suite, les scénarios d'application réels de BLDC.
1, Le refroidissement par air du ventilateur de refroidissement silencieux est le premier choix pour le refroidissement de nombreux appareils.
Par exemple, bon nombre des principaux “silencieux” châssis sur le marché, si l'utilisation du refroidissement par air, le ventilateur de refroidissement à l'intérieur est essentiellement l'utilisation de BLDC.
La base utilisée pour dissiper la chaleur vers l'ordinateur portable est également couramment utilisée BLDC, en plus d'un grand système de refroidissement par ventilation à l'intérieur, l'utilisation de ventilateurs BLDC. Il existe également des ventilateurs à grande vitesse et d'autres produits.
2, Les drones multi-axes sont utilisés dans les BLDC de plus grande puissance, adapté à l'ESC approprié (ESC), puis utiliser PWM pour contrôler la vitesse BLDC est très pratique.

3, Outils électriques et autres produits, tels que les lots électriques, la production nationale de clés électriques est essentiellement utilisée BLDC, et la plupart des perceuses à main aussi.
Principalement en raison de la grande efficacité de BLDC, et prolonger la durée de vie des outils électriques alimentés par batterie. Un autre point est que le couple de sortie du moteur brushless est très stable.
Il existe aussi des compresseurs frigorifiques, ventilateurs de congélateur, ainsi que des purificateurs d'air, aspirateurs/balayeuses, pistolets fascias, etc., qui font très chaud ces dernières années, dont la plupart sont pilotés par BLDC.
