¿Qué motor para el robot de rehabilitación?(robot con motor de corriente continua)?
robot de rehabilitación(robot con motor de corriente continua) usar Robótica de rehabilitación pertenece a una rama del robot médico, Debido a la popularidad de 5G, se usa ampliamente en medicina., rehabilitación y otros campos; robot de rehabilitación(robot con motor de corriente continua) en las articulaciones, conducir, bandeja, caminar y otros componentes micro ampliamente utilizados motor de corriente continua con cepillo, motor CC sin escobillas, motor paso a paso, motor de copa hueca, servo y otros micromotores, como motor de accionamiento. Generalmente, También se utilizan junto con una caja reductora.. A continuación se detallan los tipos de micromotores y parámetros que se utilizarán en los robots de rehabilitación..
Primero. Motorreductores de corriente continua
categoria de producto: motorreductor CC
Modelo de producto:ZWMD008008-152-01
Especificaciones del producto: Producto de Φ8MM
Voltaje:4.2V
Sin velocidad de carga:15000-30000rpm
Corriente sin carga: <105 mamá (puede ser personalizado)
Relación de reducción de velocidad: 152:1 (personalizable)
Carga nominal:personalizado bajo demanda

Segundo, motorreductor paso a paso
Clasificación del producto: Motorreductor paso a paso
Diámetro externo: 6milímetro
Material: Hardware
Dirección de rotación: cw&ccw
Diferencia de retorno de la caja de cambios: ≤3°
Cojinete: cojinete de aceite; rodamiento
descentramiento axial: ≤0,3 mm (cojinete de aceite); ≤0,2 mm (rodamiento)
Carga radial del eje de salida: ≤ 0.5N (cojinete de aceite); ≤ 5N (rodamiento)
Temperatura de trabajo: -20……+85℃

Tres, motor de copa hueca
Clasificación del producto: motorreductor de copa hueca
Diámetro externo: 24milímetro
Material: el plastico
Dirección de rotación: cw&ccw
Diferencia de retorno de la caja de cambios: ≤3° (puede ser personalizado)
Cojinete:Cojinete de aceite;rodamiento
descentramiento axial: ≤0,1 mm(cojinete de aceite);≤0,1 mm(rodamiento)
Carga radial del eje de salida:≤50N(cojinete de aceite);≤100N(rodamiento)
Velocidad de entrada:≤15000rpm
Temperatura de funcionamiento:-20……+85℃

cuatro, motor de cepillo de CC
Clasificación del producto: Motorreductor DC con escobillas
Diámetro externo: 10milímetro
Material: hardware
Dirección de rotación: cw&ccw
Diferencia de retorno de la caja de cambios: ≤3°
Cojinete:cojinete de aceite;rodamiento
descentramiento axial: ≤0,3 mm(cojinete de aceite);≤0,2 mm(rodamiento)
Carga radial del eje de salida: ≤2N (cojinete de aceite); ≤7N (rodamiento)
Temperatura de funcionamiento: -20 ……+85℃

V. Motor CC sin escobillas
categoria de producto: Motorreductor sin escobillas
Especificaciones del producto:Productos de Φ20MM
Voltaje:12V
Corriente sin carga:220 mA (personalizable))
Velocidad de carga:2.4-1000 rpm (personalizable))
Relación de reducción de velocidad: 5/25/125/625:1 (personalizable)

Seis, servo personalizado no estándar
Nombre del producto: servo-robot
Descripción del proyecto Con el fin de satisfacer las necesidades de varios tipos de articulaciones robóticas desarrolladas con alta tecnología moderna., Producimos cajas de engranajes de juntas robóticas con especificaciones que van desde 3,4 mm a 45 mm.; Para resolver la precisión del diseño y fabricación del servoengranaje y el control de la diferencia de retorno del servo., Hemos optimizado el diseño y la precisión de fabricación del servoengranaje de acuerdo con nuestros muchos años de R.&D y experiencia en diseño combinadas con la demanda del mercado de juntas de robots para reducir la diferencia de retorno..
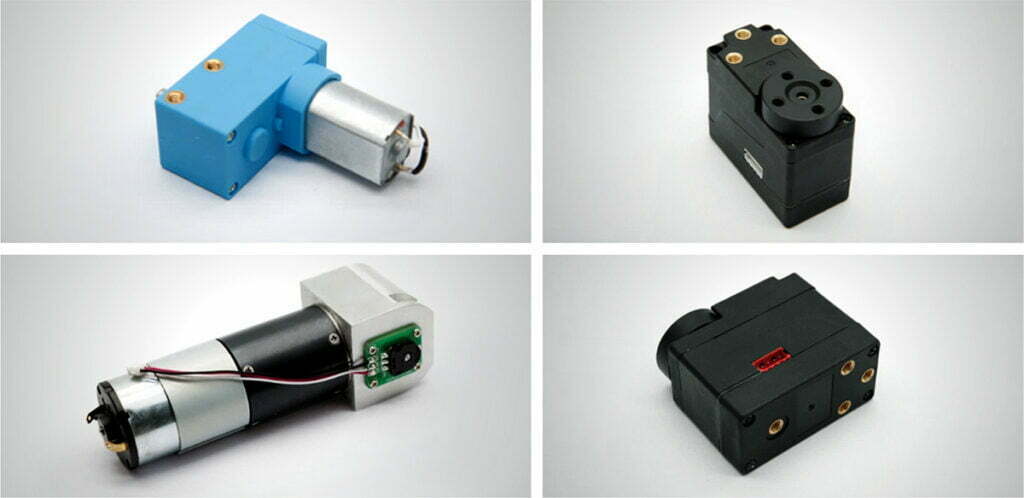
Diferentes partes del robot de rehabilitación., utilizando diferentes motores de microaccionamiento, servo, motores de accionamiento personalizados no estándar, Generalmente se aplica en el servo conjunto., rotación de la unidad, interacción de las extremidades y otros módulos de accionamiento.
