
Conceptos básicos del motor CC sin escobillas-BLDC — TMC4671-LA
Cuando se trata de motores CC sin escobillas, es necesario mencionar el motor del cepillo. Los motores de escobillas tienen una desventaja bastante molesta: eso es “ruidoso”.
Porque las escobillas y el anillo de conmutación necesitan fricción constante, para alimentar la armadura.
Asi que, si quieres un “ventilador silencioso”, Ciertamente no puedes elegir el uso de productos con motor de cepillo..
Y es más probable que los cepillos se dañen después de mucho tiempo.. Cuando la corriente es alta, Incluso puedes ver los cepillos crujir y chispear al cambiar de dirección..
Ninguna de estas desventajas se encuentra en el Motor CC sin escobillas-BLDC que presentaremos a continuación!
Presentaremos el sin escobillas. Motor DC-BLDC (BLDC para abreviar) de los siguientes cuatro aspectos.
1, Las ventajas y desventajas de BLDC.
2, El principio de funcionamiento de BLDC.
3, El modo de control de BLDC.
4, El uso real de BLDC.
1、Ventajas y desventajas del BLDC
Motor CC sin escobillas, literalmente, su característica más importante es “sin escobillas”, lo que significa que no hay cepillos.
Porque no hay cepillo, Es muy perfecto para evitar las diversas deficiencias del motor del cepillo.. Entonces a su vez, sus principales ventajas son.
1, larga vida; 2, puede estar en silencio; 3, alta eficiencia (baja pérdida); 4, tamaño más pequeño; 5, alta estabilidad.
- 1. Los motores CC sin escobillas funcionan en una amplia gama de velocidades, a cualquier velocidad, se puede ejecutar a máxima potencia.
- 2. Excelente capacidad de sobrecarga y alta eficiencia operativa.
- 3. El motor DC sin escobillas es más pequeño, gama más amplia de aplicaciones y mayor densidad de potencia en comparación con el motor de cepillo.
- 4. Comparado con el control de accionamiento del motor asíncrono., el manejo es más simple.
- 5. El motor CC sin escobillas no tiene estructura de conmutador mecánico y está encerrado en su interior., Lo que puede evitar que las partículas de polvo voladoras entren en el interior del motor y provoquen diversos problemas y una alta confiabilidad..
- 6. Las características externas son mejores., operación a baja velocidad, Puede producir un gran par, puede proporcionar un par de arranque relativamente grande.
Desventajas del BLDC
Volvamos a la pregunta que quedó al frente.: ¿Cuáles son las desventajas de BLDC??
Creo que ya lo has adivinado: Hemos dedicado mucho espacio a hablar sobre el método de control de BLDC., suficiente para ver la dificultad de su control, comparado con el motor del cepillo, es mucho mas alto!
Entonces, la mayor desventaja del BLDC es su alta dificultad de control y el alto precio de conducción del ESC. (Control electrónico de velocidad, ESC para abreviar).
También tiene la desventaja de que el BLDC debido a la resistencia inductiva, el inicio irá acompañado de nerviosismo, A diferencia del motor del cepillo, el arranque es tan suave..
En el presente, Hay tres métodos principales de control de motores sin escobillas, de la siguiente manera.
1、Control de onda cuadrada.
También conocido como control de onda trapezoidal., 120° controlar, 6-control de conmutación de pasos
El método de control de onda cuadrada tiene la ventaja de contar con algoritmos de control simples., bajos costos de hardware, el uso del desempeño ordinario de la controlador podrá obtener una alta velocidad del motor.
La desventaja es que la fluctuación del par es grande., hay una cierta cantidad de ruido actual, y la eficiencia no llega al máximo. El control de onda cuadrada es adecuado para aplicaciones que no requieren un alto rendimiento de rotación del motor..
El control de onda cuadrada utiliza un sensor Hall o un algoritmo de estimación sin sensor para obtener la posición del rotor del motor., y luego realiza seis conmutaciones (uno cada 60°) basado en la posición del rotor dentro de un ciclo eléctrico de 360°.
En cada posición de conmutación, el motor genera una fuerza en una dirección específica., por lo que se puede decir que la precisión de la posición del control de onda cuadrada es eléctrica de 60°.
Dado que la forma de onda de la corriente de fase del motor está cerca de la onda cuadrada en esta forma de control, se llama control de onda cuadrada.

2、Control de onda sinusoidal.
El método de control de onda sinusoidal utiliza la onda SVPWM., y la salida es un voltaje de onda sinusoidal trifásico, y la corriente correspondiente también es una corriente de onda sinusoidal.
Este método no tiene el concepto de conmutación de control de onda cuadrada., o pensar que un ciclo eléctrico en un número infinito de conmutaciones.
Obviamente, comparado con el control de onda cuadrada, El control de onda sinusoidal tiene menos fluctuación de par y menos armónicos de corriente., lo que hace que el control se sienta más “delicado”, pero los requisitos de desempeño del controlador son ligeramente más altos que el control de onda cuadrada, y la eficiencia del motor no se puede maximizar.
3、FOC control

También conocido como conversión de frecuencia vectorial., control direccional del vector del campo magnético
El control de onda sinusoidal realiza el control del vector de voltaje., realiza indirectamente el control del tamaño actual, pero no puede controlar la dirección de la corriente.
El método de control FOC puede considerarse como una versión mejorada del control de onda sinusoidal., que realiza el control del vector actual, es decir., el control vectorial del campo del estator del motor.
Dado que la dirección del campo del estator está controlada, El campo del estator y el campo del rotor se pueden mantener a 90° en todo momento., Y se puede lograr la salida de par máxima a una determinada corriente..
Las ventajas del método de control FOC son: baja fluctuación de par, alta eficiencia, Bajo nivel de ruido y rápida respuesta dinámica..
Las desventajas son: mayor costo de hardware, mayores requisitos para el rendimiento del controlador, y los parámetros del motor deben coincidir.
FOC es actualmente la mejor opción para el control eficiente de motores DC sin escobillas. (BLDC) y motores síncronos de imanes permanentes (PMSM).
FOC controla con precisión la magnitud y dirección del campo magnético, lo que hace que el par del motor sea suave, ruido bajo, alta eficiencia, y tiene una respuesta dinámica de alta velocidad.
Debido a las ventajas obvias de FOC, Muchas empresas están sustituyendo gradualmente el control de los productos tradicionales por FOC para numerosas aplicaciones..
Alemania Trinamic tiene un chip de servocontrol con control vectorial de campo magnético (FOC) — TMC4671-LA
– Modo de control de par
– Modo de control de velocidad
– Modo de control de posición
– Frecuencia de actualización de control actual y frecuencia PWM máxima de 100 KHz (La frecuencia de actualización para el control de velocidad y posición se puede configurar como un múltiplo de la frecuencia de actualización actual.)

El TMC4671 es un chip de servocontrol totalmente integrado que proporciona control direccional de campo magnético para motores CC sin escobillas., motores síncronos de imanes permanentes, 2-motores paso a paso de fase, Motores de corriente continua con escobillas y motores de bobina móvil..
Todas las funciones de control están integradas en el hardware.. Con ADC integrados, interfaz del sensor de posición, y diferencial de posición, este servocontrolador con todas las funciones es adecuado para una variedad de aplicaciones de servo.
2、El principio de funcionamiento de BLDC
BLDC es un tipo de motor., por lo que su composición más básica es inseparable del estator y rotor.
El estator de un motor de escobillas es un imán permanente., mientras que su rotor es una bobina energizada (devanado). Como se muestra en la siguiente figura.

Pero para el BLDC, el opuesto es verdad!
el estator (estator) de un BLDC es una bobina energizada, mientras que el rotor es un imán permanente!

De “Ley de Maxwell-Ampere”, podemos saber que el espacio cerca de la bobina energizada generará un campo magnético. Y la dirección de la distribución del campo magnético., podemos usar el “regla de la mano derecha” para derivar.
En realidad, esto es lo que solemos llamar “electroimán”!
Entonces lo siguiente es simple., ¿Cuáles son las propiedades de los imanes??
El mismo sexo se repugna, el sexo opuesto se atrae!
Asi que, solo necesitamos darle a la bobina del estator para acceder a la dirección apropiada de la corriente, eso es, de modo que los polos magnéticos de la dirección del electroimán.
Asi que, Solo necesitamos conectar la bobina del estator a la dirección apropiada de la corriente., eso es, Deje que la dirección de los polos magnéticos del electroimán y la dirección de los polos magnéticos del imán permanente correspondan exactamente., no poder repeler, o atraer el rotor para hacer un movimiento de rotación..
Optimización del estator.
El método de conducción anterior., es decir. energizar cada bobina individualmente en secuencia, Es factible pero demasiado engorroso e ineficiente..
Por lo tanto, el BLDC real combinará esas seis bobinas de dos en dos y las dividirá en tres devanados, A, B, y C, como sigue.

De esta forma podemos accionar dos electroimanes al mismo tiempo., lo que inmediatamente duplica la eficiencia.
Pero esto es sólo con el imán. “atracción” características, no olvides que el imán también “repulsión” características.
Si accionamos otro conjunto de bobinas al mismo tiempo, para que el conjunto anterior de bobinas “atraer” el rotor cuando el otro conjunto de bobinas “repeler” el rotor, Entonces nuestro rotor obtendrá una mayor fuerza motriz.!
Hasta ahora, Este modelo ha comenzado a acercarse al producto BLDC real..
Pero para el modelo anterior
Sin embargo, para el modelo anterior, Necesitamos suministrar dos devanados con dos conjuntos de potencia en direcciones opuestas para lograr el efecto de “atracción” y “repulsión” al mismo tiempo.
Esto es demasiado complicado y costoso para aplicaciones prácticas..
A continuación hablaremos de la “Método de control BLDC”, que resolverá el problema anterior.
3、El método de control de BLDC
La original A, B, C tres devanados son independientes, entonces es muy problemático controlarlos.
Entonces si conectamos los tres devanados de A,B,C juntos y armar un “arreglo de estrellas”, Cuál será el resultado?

Originalmente tres devanados, conduciendo a seis líneas; ahora llevamos a la línea reducida a solo tres líneas, entonces, ¿cómo lograr el mismo efecto de control con seis líneas tan conectadas??
La siguiente figura.
El lado positivo de la fuente de alimentación está conectado a la esquina superior derecha de la entrada del devanado A., mientras que el lado negativo de la fuente de alimentación está conectado a la esquina inferior izquierda de la salida del devanado B.
Esta vez el devanado A y el devanado B se accionan al mismo tiempo., y su polaridad es exactamente opuesta, para lograr el mismo efecto cuando los tres devanados se accionan de forma independiente!
Entonces siguiendo esta secuencia: AB-AC-BC-BA-CA-CB, los seis tiempos, y ciclar los devanados del estator a su vez, el rotor puede seguir girando!
Se pueden utilizar seis interruptores electrónicos para controlar estos seis ritmos., como sigue.
Detección de posición
Aunque ya sabemos controlar los seis tiempos del rotor.
¿Pero has encontrado un nuevo problema?: si no conoces la posición del rotor, ¿Cómo sabes cuándo conducir qué bobinado??
Entonces tenemos que saber la posición actual del rotor.!
Y la posición del rotor se detecta de dos formas generales..
1, Método de detección del sensor Hall.
La siguiente figura, poner en el estator H1,H2,H3, tres sensores Hall, Puedes conocer la posición exacta actual del estator..
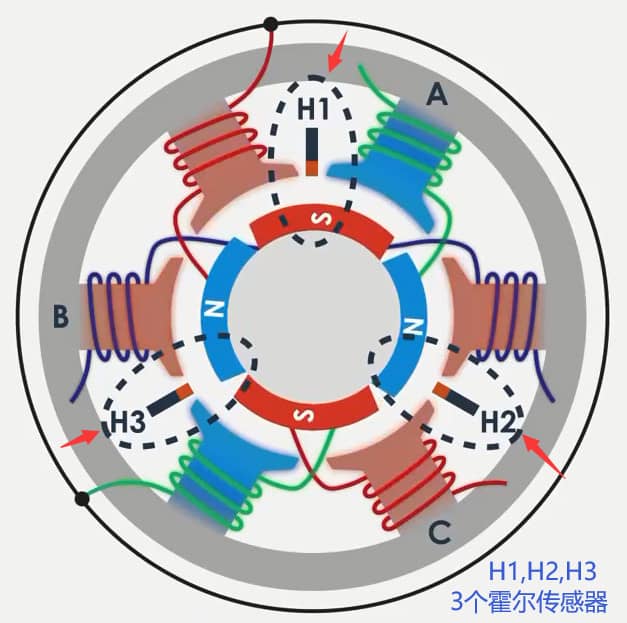
Salida del sensor Hall con niveles altos y bajos para indicar.

2, método de detección de fuerza electromotriz inversa
El método de detección Back EMF se basa en el principio de inducción electromagnética..
Cuando el campo magnético (flujo magnético) alrededor de un devanado sin energía cambia, En este devanado se induce un potencial eléctrico..
Detectando la magnitud y dirección de este potencial eléctrico., También podemos conocer la posición actual del estator..

Estos dos métodos de detección tienen sus ventajas y desventajas..
La detección del sensor Hall es un poco más precisa, pero también más costoso.
De lo contrario, el método de detección de fuerza electromotriz inversa es más económico, pero un poco menos preciso.
Rotor interior o rotor exterior
BLDC tiene dos tipos de estructura.: El interior del rotor se llama rotor interior BLDC.; de lo contrario, el rotor exterior se llama rotor exterior BLDC.

Hablando relativamente, el rotor exterior BLDC se utiliza con más frecuencia.
La razón principal es que el rotor exterior BLDC tiene una estructura mecánica más estable.. Esto se debe a que el rotor del motor tiene tendencia a expandirse hacia afuera debido a la fuerza centrífuga bajo operación a alta velocidad..
Por lo tanto, el rotor interno BLDC necesita una precisión mecánica muy alta para garantizar que el rotor y el estator no peleen..
Pero si la distancia reservada es demasiado grande, Esto provocará una fuga magnética y afectará la eficiencia general del motor..
Pero esto no es un problema con el rotor exterior BLDC., porque el rotor exterior naturalmente no se ve afectado por la expansión.
4、La aplicación práctica de BLDC
Entonces echemos un vistazo al siguiente., Los escenarios de aplicación reales de BLDC..
1, La refrigeración por aire con ventilador de refrigeración silenciosa es la primera opción para la refrigeración de muchos dispositivos..
Por ejemplo, muchos de los principales “silencioso” chasis en el mercado, si el uso de refrigeración por aire, el ventilador de refrigeración interior es básicamente el uso de BLDC.
La base utilizada para disipar el calor a la computadora portátil también se usa comúnmente como BLDC., además de un gran sistema de refrigeración por ventilación en el interior, el uso de ventiladores BLDC. También hay sopladores de aire de alta velocidad y otros productos..
2, Los drones multieje se utilizan en BLDC de mayor potencia, adaptado al ESC apropiado (ESC), y luego usar PWM para controlar la velocidad BLDC es muy conveniente.

3, Herramientas eléctricas y otros productos., como lotes eléctricos, La producción nacional de llaves eléctricas se utiliza básicamente BLDC., y la mayoría del taladro manual también.
Principalmente debido a la alta eficiencia de BLDC, y hacer que las herramientas eléctricas que funcionan con baterías duren más. Otro punto es que la salida de par del motor sin escobillas es muy estable..
También hay compresores frigoríficos., ventiladores de refrigeración del congelador, así como purificadores de aire, aspiradoras/barredoras, pistolas de fascia, etc., que están muy calientes en los últimos años, la mayoría de los cuales son impulsados por BLDC.
