

Robotik anstrengen: Hochtorque-Steppermotoren für Robotikanwendungen
Die Robotik beschränkt sich nicht mehr auf Science-Fiction-Fantasien, Krankenhäuser, und tägliches Leben. Im Herzen dieser Revolution lügenHochtorque-Schrittmotoren, entwickelt, um Präzision zu liefern, Zuverlässigkeit, und Machtdichte, bei der traditionelle Aktuatoren zu kurz kommen. In diesem Artikel wird untersucht.
Warum High-Dr-Torque-Stepper die Robotik dominieren
Robotersysteme Nachfrage:
- Präzisionspositionierung (z.B., chirurgisch Roboter erfordert eine Genauigkeit von ±0,05 mm)
- Hoch-Drehmoment-zu-VerlagerungFür schnelle Starts/Stopps
- HaltbarkeitIn harten Umgebungen (Staub, Feuchtigkeit, Temperaturschwankungen)
Hybrid -Schrittmotoren Excel hier, Kombination dauerhafter Magnete und Zahnrotoren, um eine außergewöhnliche Winkelauflösung und Drehmomentkonsistenz zu liefern-kritisch für sich wiederholende Aufgaben wie CNC-Mahlen oder Montage-Line-Schweißen.
Top-Hochtorque-Stepper-Technologien für Robotik
Basierend auf den Innovationen der führenden Hersteller:
1. Monde 'PowerPlus -Serie
- Drehmomentbereich: 0.7–35 nm (Nema 23–34 Frames)
- Schlüsselinnovation: 25–40% höheres Drehmoment vs. Standards, Ideal für 3D -Drucker und medizinische Roboter.
- Robotik passt: Optimiert für dynamische Nutzlasten in automatisierten geführten Fahrzeugen (AGVs).
2. KOLLMORGEN T-SERIE
- Drehmomentdichte: Branchenführend, mit Resonanzdämpfungsalgorithmen.
- Anwendungen: Kollaborative Roboter (Cobots) und Präzision Arme brauchen sanfte Bewegung.
3. JVL IP67-Bewertungsmotoren
- Robustes Design: Standspalzt die Waschungen bei Robotern zur Verarbeitung von Lebensmitteln.
- Drehmomentbereich: 0.01–50 nm (Nein 08–53), Aktivieren kompakter gemeinsamer Designs in artikulierten Armen.
4. Pacific Scientific Microstesping Motors
- Auflösung: 200 Schritte/rev + Encoder-Feedback für die Genauigkeit mit geschlossener Schleife.
- Anwendungsfall: Chirurgische Roboter benötigen 12 NM Drehmoment und 2,500 Drehzahlgeschwindigkeit.
Tisch: Hochtorque-Steppermotor-Vergleich
| Serie | Drehmomentbereich | Schlüsselfunktion | Am besten für |
|---|---|---|---|
| PowerPlus der Monde | 0.7–35 nm | 40% höhere Drehmomenteffizienz | AGVs, 3D-Drucker |
| KOLLMORGEN T-SERIE | Brauch | Anti-Resonanzkontrolle | Cobots, Präzisionsarme |
| JVL Compact | 0.01–50 nm | IP67 Schutz | Lebensmittel/medizinische Roboter |
| Pazifisch wissenschaftlich | Bis zu 12 Nm | 0.035 kg · m² Trägheit | Chirurgische/bildgebende Robotik |
Kritische Robotikanwendungen

1. Industrielle Automatisierung
- Herausforderung: Sich wiederholend heben (z.B., 20kg Nutzlasten) Ohne Positionsdrift.
- Lösung: ES GIBT KEIN 42 Motoren (z.B., Anaheim Automatisierung 5,700 Oz-in-Modelle) mit Dualwellen für die Drehmomentspaltung.
2. Medizinische Robotik
- Erfordernis: Genauigkeit von Submillimetern in Spritzenpumpen oder chirurgischen Armen.
- Motor Tech: Hybriden mit geschlossenem Schleifen mit 256-facher Mikrostrepping (z.B., Wantai 20by) Für zitternde Bewegung.
3. Handy, Mobiltelefon & Serviceroboter
- Brauchen: Energieeffizienz bei batteriebetriebenen Bots (z.B., Roboter reinigen).
- Innovation: Regenerative Antriebsantriebe umwandeln kinetische Energie in die Batterieaufladung.
4-Schrittauswahlhandbuch für Roboterdesigner
- Drehmomentdrehprofil
- Berechnen Sie das Spitzen-/Dauerdrehmoment bei Betriebsdrehzahl (z.B., 15 NM Drehmoment für Roboterschweißer hält).
- Umweltbewertung
- Priorisieren Sie IP54+ (Staub/Feuchtigkeit) Für Outdoor -Bots oder IP67 für Waschzonen.
- Kontrollkompatibilität
- Stellen Sie sicher.
- Zertifizierungen
- MTBF validieren >25,000 Stunden und ISO 9001 Herstellung für Lebenszykluszuverlässigkeit.
Technischer Vergleich zwischen Hochtorque-Steppermotoren und Servomotoren in Robotikanwendungen
1. Kernleistungskennzahlen Vergleich
| Metrisch | Hochtorque-Schrittmotoren | Servomotor | Technische Grundlage |
|---|---|---|---|
| Drehmomentmerkmale | Hohes Drehmoment bei niedrigen Geschwindigkeiten (z.B., 0.22–50 n · m), aberDrehmoment sinkt um 40–60% bei >500 U/min | Konsistent Drehmoment über die Drehzahlen (z.B., 0–3.000 U / min bei 12 N·m), 300% Überlastfähigkeit | Stepper verlassen sich auf die magnetische Zurückhaltung; Servos verwenden feldorientierte Kontrolle (FOC) |
| Positionierungsgenauigkeit | Open-Loop: ± 0,9 ° (1.8° Schrittwinkel); ** geschlossene Schleife: ± 0,05 ° ** | ** ± 0,01 ° ** (mit 17-Bit-Encodern) | Servos korrekte Fehler durch Echtzeit-Feedback; Stepper verlassen sich auf die Pulszählung |
| Dynamische Reaktion | 200–400 ms Beschleunigung (0→ 100 U / min) | <5 MS Beschleunigung (0→ 3.000 U / min) | Servo Closed-Loop ermöglicht Millisekundenanpassungen |
| Stromeffizienz | 40–60% (effizient bei niedrige Geschwindigkeiten; Kupferverluste dominieren bei hohen Geschwindigkeiten) | 80–90% (nur während der Bewegung/Holding angetrieben) | Stepper zeichnen konstante Strom; Servos passen die Leistung dynamisch ein |
| Drehmomentdichte | 20–30 N · m/kg (Standard); bis zu 48 N · m/kg (z.B., Benyuan P1010) | 15–25 N · m/kg (bis35 N · m/kgMit seltenen Erdmagneten) | Servos verwenden hochfeste Magnete; Stepper optimieren die Wicklungen |
2. Anwendungsspezifische Eignung
Industrieroboter (z.B., Gemeinsame Betätigung)
- Steppervorteile:
Kostengünstig fürPräzision bei niedriger Geschwindigkeit (z.B., Schraubenfahrung in den Montageleitungen). Beispiel: Wantai 20by erreicht± 0,05 mm WiederholbarkeitBei40% niedrigere KostenAls äquivalente Servos. - Servovorteile:
Hochgeschwindigkeitsbetrieb (>1 MS) undInstantane Lastantwort. Beispiel: Die Kollmorgen T-Serie passt sich an Laständerungen an an.0.1SMit 36 N · m Überlastdrehmoment.
Medizinische/chirurgische Roboter
- Stepper -Einschränkungen:
Schwingungsrisiken mit niedriger Geschwindigkeit, die empfindliche Aufgaben beeinflussen (z.B., Mikrochirurgie), Erfordernde zusätzliche Dämpfer. - Servo Überlegenheit:
Null-VibrationskontrolleMit 17-Bit-Encodern ermöglicht0.001 mm Präzision (z.B., da Vinci chirurgische Arme).
Mobile Roboter (z.B., AGVs, Vierbeinige)
- Stepper -Innovationen:
Benyuans P1010 -Modul (120 N · m Spitzenmoment) Macht versterbte Roboter für kontinuierliches Springen mit30% geringere EnergieverbrauchAls Servos. - Servo -Notwendigkeit:
Sofortige DrehmomententschädigungZur Geländeanpassung (z.B., 20° Steigklettern) verhindert den Schrittverlust.
3. Kosten & Lebenslange Ökonomie
| Kostenfaktor | Hohes Drehmoment Schrittmotoren | Servomotor |
|---|---|---|
| Anfängliche Kosten | 80–150 (400W System) | 350–500 (400W System) |
| Energiekosten | Hoch (Konstante Stromauslosung) | 30–50% niedriger (Anpassungskraft) |
| Wartungskosten | Niedrig (einfache Mechanik) | Höher (Encoderversagen >15% über 5 Jahre) |
| ROI -Periode | <1 Jahr (Projekte mit niedriger Geschwindigkeit) | 2–3 Jahre (Hochverzinsung) |
✅Auswahlregel: Stepper fürniedriger Geschwindigkeit, budgetempfindlichProjekte; Servos fürhohe Geschwindigkeit, 24/7 Industriesysteme.
4. Hybridtechnologien & Auswahlrahmen
Hybridlösungen
- Stepper mit geschlossenen Schleife:
Integrierte Encoder (z.B., Trinamisch) Steigern Sie die Genauigkeit zu± 0,05 ° bei 15% niedrigeren KostenAls Servos. - Integrierte Servos:
Antriebsmotor-Combos (z.B., B&R acoposmotor) Größe verringern durch40%.
Entscheidungsworkflow
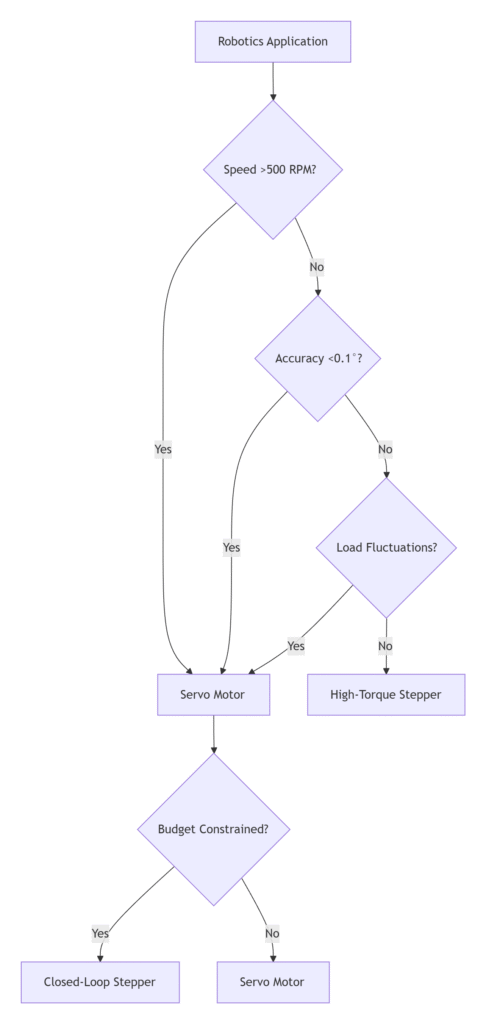
Hochtorque-Stepper zeichnen sich ausniedriger Geschwindigkeit, statische Belastung, KostengetriebenRobotik (z.B., 3D Druckerachsen, Leichte AGVs), während Servos dominierenhohe Geschwindigkeit, dynamische BelastungAnwendungen (z.B., chirurgische Roboter, Industriewaffen). Zukünftige Konvergenz des geschlossenen Regelkreises Stepper und Kompaktservos wird Leistungsgrenzen verwischen – die Auswahl hängt davon abdynamische operative BedürfnisseUndGesamtkosten der Lebenszyklus.
Zukünftige Trends: Robotik der nächsten Generation
- Integrierte Encoder: 17-Bit Absolute-Encoder, die eine Echtzeit-Fehlerkorrektur ermöglichen (<1µs Latenz).
- AI-gesteuerte Kontrolle: Das maschinelle Lernen passt das Drehmoment aus der Ausgabe präventiv ein, Energieverschwendung durch schneiden 30%.
- Piezoelektrische Stepper: Reibungslose Keramikaktuatoren für mikro-chirurgische Roboter.
Fazit: Drehmoment als Motor der Roboterinnovation
Von Montagelinien, die Produktionsziele übertreffen, bis hin zu Robotern, die Leben in Operationssälen retten, Hochtorque-Stepper sind die ungeschriebenen Helden. Wie die Ingenieure von Kollmorgen behaupten: „In Robotik, Drehmomentpräzision ist nicht optional - es ist die Bewegungssprache selbst. "
Erforschen Sie unsere robootik-optimierte Serie:
- ES GIBT KEIN 17/23 Hochtorque-Hybriden: 40% Mehr Drehmoment, IP65-Rating für harte Umgebungen.
- Servo-Stepper mit geschlossenem Schleifen: 17-Bit -Encoder + Algorithmen mit Zero-Kogging.
Fordern Sie 3D-Modelle oder Drehmomentgeschwindigkeitskurven für Ihr nächstes Design an.
Greensky Power Co., GmbH. ist ein professioneller Hersteller, der sich mit der Forschung beschäftigt, Entwicklung, Produktion, Verkauf von Stepper -Motoren mit hohem Drehmoment.
Wenn Sie ein hohes Drehmoment suchen Schrittmotoren für Robotikprojekt, wenden Sie sich bitte an unser Verkaufsteam.

