
Bürstenloser Gleichstrommotor – BLDC-Grundlagen — TMC4671-LA
Wenn es um bürstenlose Gleichstrommotoren geht, Es ist notwendig, den Bürstenmotor zu erwähnen. Bürstenmotoren haben einen ziemlich ärgerlichen Nachteil: das ist “laut”.
Denn die Bürsten und der Kommutierungsring müssen ständig reiben, um den Anker anzutreiben.
So, wenn du ein willst “leiser Lüfter”, Sie können sich sicherlich nicht für die Verwendung von Bürstenmotorprodukten entscheiden.
Und es ist wahrscheinlicher, dass die Bürsten nach längerer Zeit beschädigt werden. Wenn der Strom hoch ist, Sie können sogar sehen, wie die Bürsten beim Richtungswechsel knistern und Funken sprühen.
Keiner dieser Nachteile findet sich in der Bürstenloser Gleichstrommotor-BLDC die wir im Folgenden vorstellen werden!
Wir werden den bürstenlosen vorstellen Gleichstrommotor-BLDC (Kurz: BLDC) aus den folgenden vier Aspekten.
1, Die Vor- und Nachteile von BLDC.
2, Das Funktionsprinzip von BLDC.
3, Der Steuermodus von BLDC.
4, Die tatsächliche Verwendung von BLDC.
1、Vor- und Nachteile von BLDC
Bürstenloser Gleichstrommotor, buchstäblich, Sein größtes Merkmal ist “bürstenlos”, was bedeutet, dass keine Bürsten vorhanden sind.
Weil es keine Bürste gibt, Es ist sehr perfekt, um die verschiedenen Mängel des Bürstenmotors zu vermeiden. Also wiederum, Seine Hauptvorteile sind.
1, langes Leben; 2, kann schweigen; 3, hohe Effizienz (geringer Verlust); 4, kleinere Größe; 5, hohe Stabilität.
- 1. Bürstenlose Gleichstrommotoren arbeiten in einem breiten Drehzahlbereich, bei jeder Geschwindigkeit, kann mit voller Leistung betrieben werden.
- 2. Hervorragende Überlastfähigkeit und hohe Betriebseffizienz.
- 3. Der bürstenlose Gleichstrommotor ist kleiner, breiteres Anwendungsspektrum und höhere Leistungsdichte im Vergleich zum Bürstenmotor.
- 4. Im Vergleich zur Antriebssteuerung eines Asynchronmotors, Der Antrieb ist einfacher.
- 5. Der bürstenlose Gleichstrommotor hat keine mechanische Kommutatorstruktur und ist im Inneren geschlossen, Dadurch kann verhindert werden, dass herumfliegende Staubpartikel in das Innere des Motors gelangen und zu verschiedenen Problemen und hoher Zuverlässigkeit führen.
- 6. Die äußeren Eigenschaften sind besser, Betrieb mit niedriger Geschwindigkeit, kann ein großes Drehmoment abgeben, kann ein relativ großes Anlaufdrehmoment bereitstellen.
Nachteile von BLDC
Kehren wir noch einmal zur Frage weiter vorne zurück: Was sind die Nachteile von BLDC??
Ich glaube, Sie haben es bereits erraten: Wir haben so viel Platz darauf verwendet, über die Steuerungsmethode von BLDC zu sprechen, genug, um die Schwierigkeit seiner Kontrolle zu erkennen, im Vergleich zum Bürstenmotor, ist viel höher!
Der größte Nachteil von BLDC ist also die hohe Steuerungsschwierigkeit und der hohe Preis für den Antrieb des ESC (Elektronische Geschwindigkeitsregelung, Kurz: ESC).
Es gibt auch einen Nachteil, den der BLDC aufgrund des induktiven Widerstands hat, Der Start wird von Jitter begleitet sein, Im Gegensatz zum Bürstenmotor startet er so sanft.
Momentan, Es gibt drei gängige Steuerungsmethoden für bürstenlose Motoren:.
1、Rechteckwellensteuerung.
Auch als Trapezwellensteuerung bekannt, 120° Kontrolle, 6-Schrittkommutierungssteuerung
Die Rechteckwellen-Steuerungsmethode bietet den Vorteil einfacher Steuerungsalgorithmen, niedrige Hardwarekosten, die Nutzung der gewöhnlichen Leistung des Regler wird in der Lage sein, eine hohe Motorgeschwindigkeit zu erreichen.
Der Nachteil besteht darin, dass die Drehmomentschwankung groß ist, Es gibt ein gewisses Maß an Stromrauschen, und die Effizienz erreicht nicht das Maximum. Die Rechteckwellensteuerung eignet sich für Anwendungen, die keine hohe Motordrehleistung erfordern.
Die Rechteckwellensteuerung verwendet einen Hall-Sensor oder einen sensorlosen Schätzalgorithmus, um die Position des Motorrotors zu ermitteln, und führt dann sechs Kommutierungen durch (einer alle 60°) basierend auf der Rotorposition innerhalb eines elektrischen 360°-Zyklus.
An jeder Kommutierungsposition gibt der Motor eine Kraft in eine bestimmte Richtung ab, man kann also sagen, dass die Positionsgenauigkeit der Rechteckwellensteuerung elektrisch 60° beträgt.
Da die Wellenform des Phasenstroms des Motors bei dieser Art der Steuerung nahezu einer Rechteckwelle ähnelt, es wird Rechteckwellensteuerung genannt.

2、Sinuswellensteuerung.
Die Sinuswellensteuerungsmethode verwendet die SVPWM-Welle, und der Ausgang ist eine 3-Phasen-Sinuswellenspannung, und der entsprechende Strom ist ebenfalls ein Sinuswellenstrom.
Diese Methode verfügt nicht über das Konzept der Kommutierung mit Rechteckwellensteuerung, oder denken Sie, dass ein elektrischer Zyklus unendlich viele Kommutierungen aufweist.
Offensichtlich, im Vergleich zur Rechteckwellensteuerung, Die Sinuswellensteuerung weist weniger Drehmomentschwankungen und weniger Stromoberschwingungen auf, Dadurch fühlt sich die Kontrolle besser an “empfindlich”, aber die Leistungsanforderungen der Regler sind etwas höher als die Rechteckwellensteuerung, und der Wirkungsgrad des Motors kann nicht maximiert werden.
3、FOC-Steuerung

Wird auch als Vektorfrequenzumwandlung bezeichnet, Richtungssteuerung des Magnetfeldvektors
Die Sinuswellensteuerung realisiert die Steuerung des Spannungsvektors, Realisiert indirekt die Steuerung der aktuellen Größe, kann aber die Richtung des Stroms nicht steuern.
Die FOC-Steuerungsmethode kann als eine verbesserte Version der Sinuswellensteuerung betrachtet werden, welches die Steuerung des Stromvektors realisiert, d.h., die Vektorsteuerung des Motorstatorfeldes.
Da die Richtung des Statorfeldes gesteuert wird, Statorfeld und Rotorfeld können jederzeit im 90°-Winkel gehalten werden, und die maximale Drehmomentabgabe bei einem bestimmten Strom kann erreicht werden.
Die Vorteile der FOC-Steuerungsmethode sind:: geringe Drehmomentschwankung, hohe Effizienz, geringes Rauschen und schnelle dynamische Reaktion.
Die Nachteile sind: höhere Hardwarekosten, höhere Anforderungen an die Steuerungsleistung, Motor- und Motorparameter müssen aufeinander abgestimmt sein.
FOC ist derzeit die beste Wahl für die effiziente Steuerung bürstenloser Gleichstrommotoren (BLDC) und Permanentmagnet-Synchronmotoren (PMSM).
FOC steuert die Stärke und Richtung des Magnetfelds präzise, wodurch das Motordrehmoment gleichmäßiger wird, wenig Lärm, hohe Effizienz, und verfügt über eine schnelle dynamische Reaktion.
Aufgrund der offensichtlichen Vorteile von FOC, Viele Unternehmen ersetzen mittlerweile für zahlreiche Anwendungen nach und nach die Steuerung traditioneller Produkte durch FOC.
Deutschland Trinamic verfügt über einen Servosteuerchip mit Magnetfeldvektorsteuerung (FOC) — TMC4671-LA
– Drehmomentkontrollmodus
– Geschwindigkeitskontrollmodus
– Positionskontrollmodus
– Aktualisierungsfrequenz der Stromsteuerung und maximale PWM-Frequenz von 100 kHz (Die Aktualisierungsfrequenz für die Geschwindigkeits- und Positionssteuerung kann als Vielfaches der aktuellen Aktualisierungsfrequenz konfiguriert werden)

Der TMC4671 ist ein vollständig integrierter Servosteuerchip, der die Richtungssteuerung des Magnetfelds für bürstenlose Gleichstrommotoren ermöglicht, Permanentmagnet-Synchronmotoren, 2-Phasenschrittmotoren, bürstenbehaftete Gleichstrommotoren und Schwingspulenmotoren.
Sämtliche Steuerungsfunktionen sind in die Hardware integriert. Mit integrierten ADCs, Positionssensorschnittstelle, und Positionsdifferenz, Dieser voll ausgestattete Servocontroller eignet sich für eine Vielzahl von Servoanwendungen.
2、Das Funktionsprinzip von BLDC
BLDC ist eine Art Motor, Daher ist seine grundlegendste Zusammensetzung untrennbar mit Stator und Rotor verbunden.
Der Stator eines Bürstenmotors ist ein Permanentmagnet, während sein Rotor eine erregte Spule ist (Wicklung). Wie in der Abbildung unten gezeigt.

Aber für das BLDC, das Gegenteil ist wahr!
Der Stator (Stator) Bei einem BLDC handelt es sich um eine erregte Spule, während der Rotor ein Permanentmagnet ist!

Aus “Maxwell-Ampere-Gesetz”, Wir können wissen, dass der Raum in der Nähe der erregten Spule ein Magnetfeld erzeugt. Und die Richtung der Magnetfeldverteilung, wir können das nutzen “Rechte-Hand-Regel” ableiten.
In der Tat, so nennen wir es oft “Elektromagnet”!
Dann ist das nächste einfach, Welche Eigenschaften haben Magnete??
Das gleiche Geschlecht stößt sich gegenseitig ab, Das andere Geschlecht zieht sich gegenseitig an!
So, Wir müssen lediglich die Spule am Stator vorgeben, um die entsprechende Stromrichtung zu erhalten, das ist, so dass die Magnetpole der Elektromagnetrichtung entsprechen.
So, Wir müssen lediglich die Spule am Stator an die entsprechende Stromrichtung anschließen, das ist, Lassen Sie die Richtung der Magnetpole des Elektromagneten und die Richtung der Magnetpole des Permanentmagneten genau übereinstimmen, nicht abwehren können, oder den Rotor anziehen, um eine Drehbewegung auszuführen.
Optimierung des Stators
Die obige Fahrmethode, d.h. Jede Spule einzeln nacheinander mit Strom versorgen, ist machbar, aber zu umständlich und ineffizient.
Deswegen, Der eigentliche BLDC kombiniert diese sechs Spulen paarweise und teilt sie in drei Wicklungen auf, EIN, B, und C, wie folgt.

Auf diese Weise können wir zwei Elektromagnete gleichzeitig antreiben, was die Effizienz sofort verdoppelt.
Aber das geht nur mit dem Magneten “Attraktion” Eigenschaften, Vergessen Sie nicht, dass der Magnet auch “Abstoßung” Eigenschaften.
Wenn wir gleichzeitig einen anderen Spulensatz antreiben, so dass der vorherige Satz von Spulen “anlocken” der Rotor, wenn der andere Satz Spulen “abstoßen” Der Rotor, dann erhält unser Rotor eine höhere Antriebskraft!
Bis jetzt, Dieses Modell hat begonnen, sich dem eigentlichen BLDC-Produkt anzunähern.
Aber für das obige Modell
Jedoch, für das obige Modell, Wir müssen zwei Wicklungen mit zwei entgegengesetzten Stromsätzen versorgen, um den Effekt zu erzielen “Attraktion” und “Abstoßung” zur selben Zeit.
Dies ist für praktische Anwendungen zu kompliziert und zu teuer.
Als nächstes werden wir darüber sprechen “BLDC-Steuerungsmethode”, was das obige Problem lösen wird.
3、BLDC-Steuerungsmethode
Das Original A, B, C drei Wicklungen sind unabhängig, daher ist es sehr mühsam, sie zu kontrollieren.
Wenn wir dann die drei Wicklungen von A verbinden,B,C zusammen und zusammen a “Sternanordnung”, was wird das Ergebnis sein?

Ursprünglich drei Wicklungen, was zu sechs Zeilen führt; führen nun dazu, dass die Zeile auf nur noch drei Zeilen reduziert ist, Wie kann man also mit sechs so verbundenen Leitungen den gleichen Steuereffekt erzielen??
Die folgende Abbildung.
Die positive Seite der Stromversorgung ist mit der oberen rechten Ecke des A-Wicklungseingangs verbunden, während die negative Seite der Stromversorgung mit der unteren linken Ecke des B-Wicklungsausgangs verbunden ist.
Diesmal werden A-Wicklung und B-Wicklung gleichzeitig angetrieben, und seine Polarität ist genau entgegengesetzt, um den gleichen Effekt zu erzielen, wenn die drei Wicklungen unabhängig voneinander angetrieben werden!
Befolgen Sie also diese Reihenfolge: AB-AC-BC-BA-CA-CB, die sechs Schläge, und die Statorwicklungen abwechselnd durchlaufen lassen, Der Rotor kann weiterdrehen!
Sechs elektronische Schalter können verwendet werden, um diese sechs Schläge anzutreiben, wie folgt.
Positionserkennung
Obwohl wir bereits wissen, wie man die sechs Schläge des Rotors steuert.
Aber haben Sie ein neues Problem gefunden?: wenn Sie die Position des Rotors nicht kennen, Woher wissen Sie, wann Sie welche Wicklung fahren müssen??
Wir müssen also die aktuelle Position des Rotors kennen!
Und die Position des Rotors wird auf zwei allgemeine Arten erfasst.
1, Methode zur Hall-Sensor-Erkennung.
Die folgende Abbildung, Setzen Sie den Stator H1, H2, H3 ein, drei Hall-Sensoren, Sie können die aktuelle genaue Position des Stators kennen.
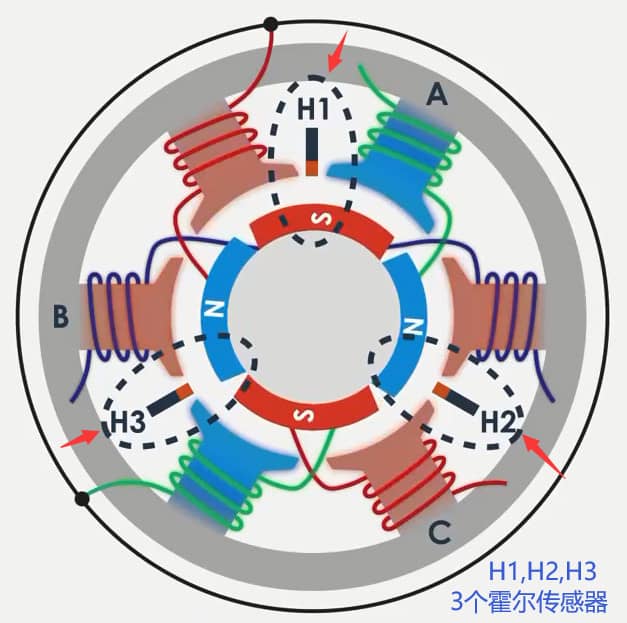
Hall-Sensor-Ausgang mit hohen und niedrigen Pegeln zur Anzeige.

2, Methode zur Erkennung einer umgekehrten elektromotorischen Kraft
Die Methode zur Erkennung von Gegen-EMF basiert auf dem Prinzip der elektromagnetischen Induktion.
Wenn das Magnetfeld (magnetischer Fluss) um eine stromlose Wicklung herum ändert sich, In dieser Wicklung wird ein elektrisches Potential induziert.
Durch Erfassen der Größe und Richtung dieses elektrischen Potenzials, Wir können auch die aktuelle Position des Stators kennen.

Diese beiden Nachweismethoden haben ihre Vor- und Nachteile.
Die Hall-Sensor-Erkennung ist etwas genauer, aber auch teurer.
Andererseits, Die Methode zur Erkennung der umgekehrten elektromotorischen Kraft ist wirtschaftlicher, aber etwas ungenauer.
Innenrotor oder Außenrotor
BLDC hat zwei Arten von Strukturen: Der Rotor im Inneren wird Innenrotor BLDC genannt; andererseits, Der Rotor außen wird Außenrotor BLDC genannt.

Relativ gesehen, Der Außenrotor BLDC wird häufiger verwendet.
Der Hauptgrund dafür ist, dass der Außenrotor-BLDC eine stabilere mechanische Struktur aufweist. Dies liegt daran, dass der Motorrotor aufgrund der Zentrifugalkraft bei Hochgeschwindigkeitsbetrieb dazu neigt, sich nach außen auszudehnen.
Daher benötigt der Innenrotor-BLDC eine sehr hohe mechanische Präzision, um sicherzustellen, dass Rotor und Stator nicht miteinander in Konflikt geraten.
Aber wenn der reservierte Abstand zu weit ist, Dies führt zu magnetischer Streuung und beeinträchtigt die Gesamteffizienz des Motors.
Beim Außenrotor-BLDC stellt dies jedoch kein Problem dar, weil der Außenrotor von Natur aus nicht von der Ausdehnung betroffen ist.
4、Die praktische Anwendung von BLDC
Dann werfen wir einen Blick auf das nächste, die tatsächlichen Anwendungsszenarien von BLDC.
1, Geräuschloser Lüfter, Luftkühlung ist für die Kühlung vieler Geräte die erste Wahl.
Zum Beispiel, viele der wichtigsten “still” Fahrgestell auf dem Markt, wenn die Verwendung von Luftkühlung, Der Kühlventilator im Inneren ist grundsätzlich die Verwendung von BLDC.
Die Basis, die zur Wärmeableitung des Laptops verwendet wird, ist ebenfalls häufig ein BLDC, zusätzlich zu einem großen Belüftungskühlsystem im Inneren, der Einsatz von BLDC-Ventilatoren. Es gibt auch Hochgeschwindigkeits-Luftgebläse und andere Produkte.
2, Mehrachsige Drohnen werden in BLDC mit größerer Leistung eingesetzt, angepasst an den entsprechenden ESC (ESC), und dann die BLDC-Geschwindigkeit mithilfe von PWM zu steuern, ist sehr praktisch.

3, Elektrowerkzeuge und andere Produkte, wie zum Beispiel elektrische Chargen, Bei der inländischen Produktion von Elektroschraubern werden grundsätzlich BLDC-Schraubendreher verwendet, und die meisten Handbohrmaschinen auch.
Vor allem wegen der hohen Effizienz von BLDC, und sorgen für eine längere Lebensdauer der akkubetriebenen Elektrowerkzeuge. Ein weiterer Punkt ist, dass die Drehmomentabgabe des bürstenlosen Motors sehr stabil ist.
Es gibt auch Kühlschrankkompressoren, Kühlventilatoren für Gefrierschränke, sowie Luftreiniger, Staubsauger/Kehrmaschinen, Blendenpistolen, usw., die in den letzten Jahren sehr heiß waren, Die meisten davon werden durch BLDC angetrieben.
